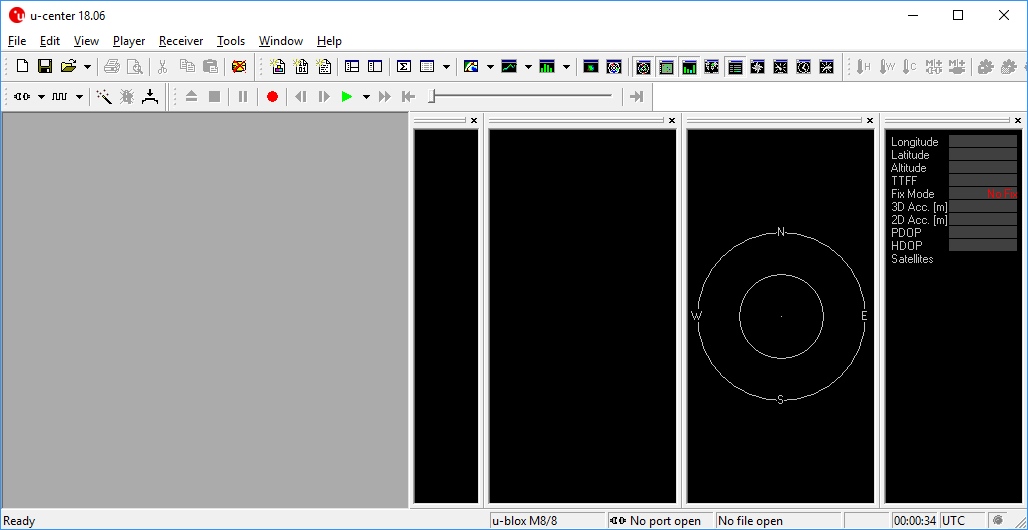
U-center from u-blox is a free software tool for configuring u-blox GPS receivers under Windows. U-center is a dense program with many interface elements. It can be overwhelming at first but over time it will become easier to use. For all its GUI weaknesses, it is very powerful for configuring the u-blox line of modules (such as the NEO-M8P-2 and SAM-M8Q to name a few). In this tutorial, we will be exploring some of its features with the NEO-M8P-2.
Required Software
The software can be obtained from u-blox. To follow along with this tutorial please download and install u-center. Once completed, open it.DOWNLOAD U-CENTER
Install Drivers
For this tutorial we’ll assume you have the SparkFun GPS-RTK but u-center can be used with any u-blox based product. Start by attaching a micro-B cable to the GPS-RTK board.
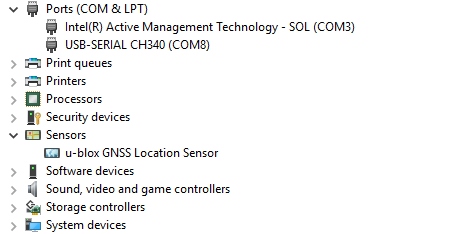
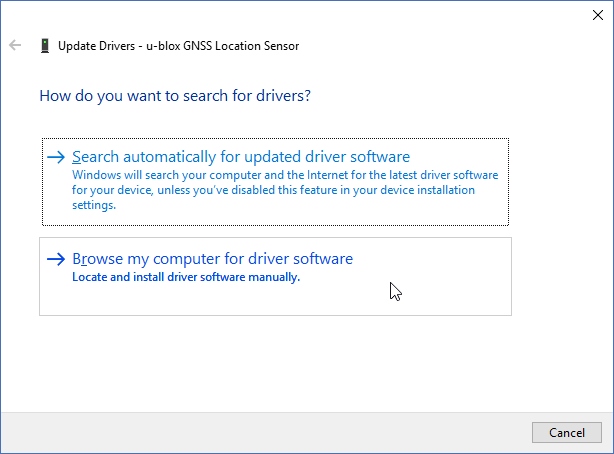
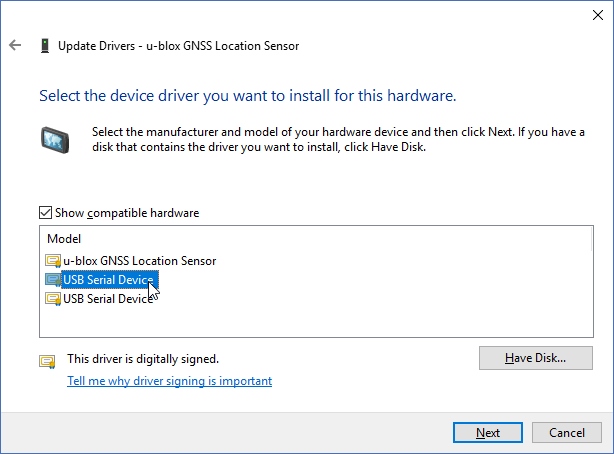
Now open Windows Device Manager. The NEO-M8 series has an annoying feature where the module comes up as a Windows Sensor rather than a serial device. If your u-blox receiver does not appear under COM ports then right click on the u-blox GNSS Location Sensor and then Update Driver. Next, click on Browse my computer for driver software.
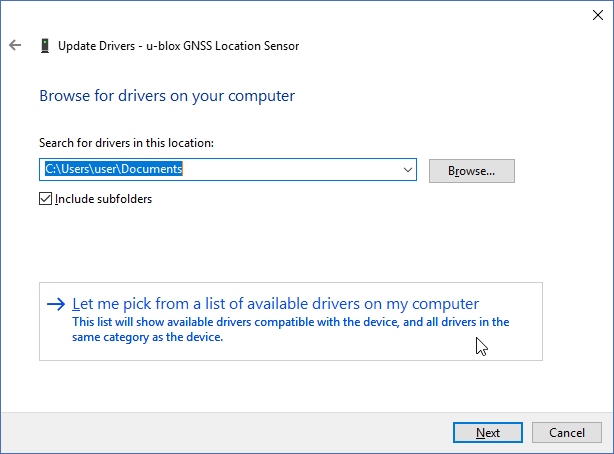
Then “Let me pick”…
Select the first USB serial device.
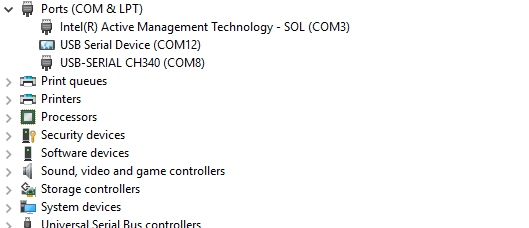
The SparkFun GPS-RTK board should now enumerate as a USB serial COM port. In the list below, the GPS-RTK board is COM12.
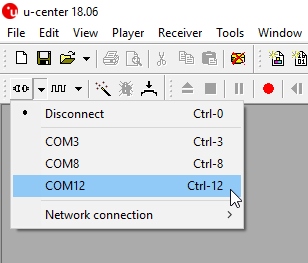
Return to u-center and drop down the port list. Select the COM port that is your RTK board. Congrats! You can now use u-center.
Configuring and Outputting NMEA Sentences
Let’s go over a few features you’ll likely use:
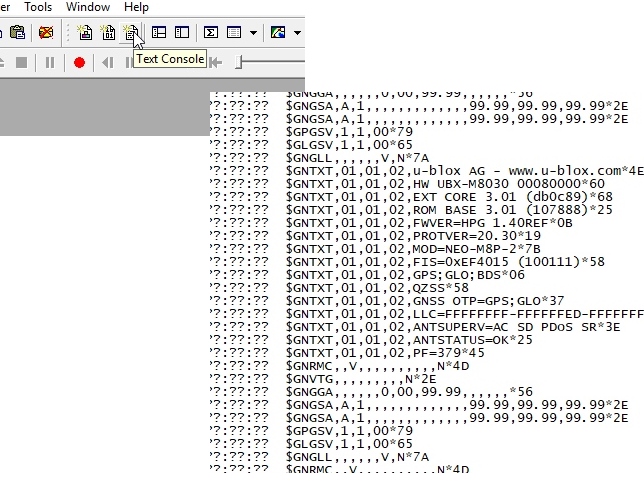
Text Console
The text console button will show you the raw NMEA sentences. This is handy for quickly inspecting the visible ASCII coming from the module over USB.
Configure
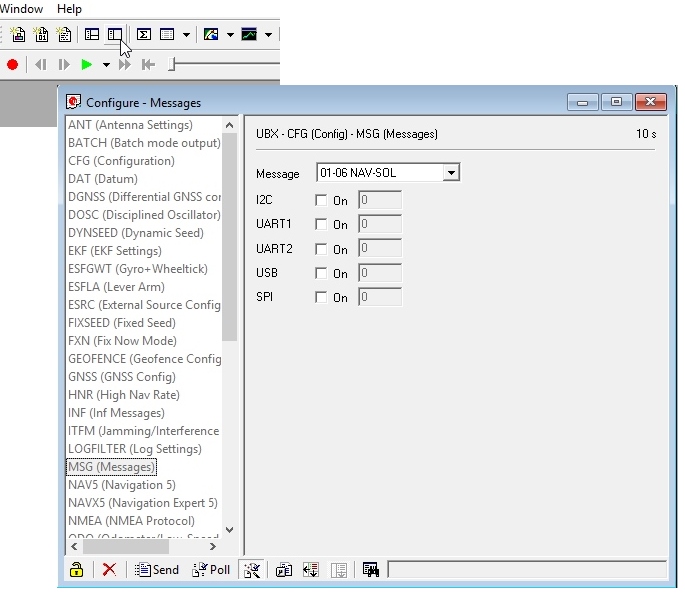
The configuration button opens the most powerful window. From this window you can inspect and configure new settings. It’s not obvious but when you click on a setting such as ‘MSG (Messages),’ u-center will poll the module for its current state. The ‘10s’ in the corner indicates how old the displayed information is. In this case it’s been 10 seconds since this setting was last queried. Click on the ‘Poll’ button to update the information. Go ahead and select the F0-00 NMEA GxGGA message. As you click the dropdown menu, the software will poll the current settings. It’s a bit disorienting at first but gets better over time.
The MSG configuration is very powerful. It allows you to enable or disable various NMEA sentences as well as binary protocols such as NAV-PVT (checkout the [full protocol datasheet](link text). Once a sentence is selected, such as GxGGA, the check boxes will be populated. If you want to disable the GxGGA sentence for the SPI interface, uncheck the SPI checkbox and then click ‘Send’. Congrats! The GxGGA sentence is no longer presented on the SPI interface. This raises an important fact:
Note: The NEO-M8 series has 4 interfaces: USB(serial), I2C, SPI, and UART. All interfaces can access information simultaneously. This means you can inspect configuration settings over the USB serial port while your Arduino makes setting changes over the I2C port. You can read NMEA sentences over the I2C port or send RTCM data into the module over SPI. It’s all highly configurable.
What is the USB Port on the NEO-M8P?
It’s like any other USB to serial device. It will enumerate on your computer as a COM port and acts as such. It is independent and separate from the UART port that is a dedicated TTL serial port.
If something is not accessible through u-center, it probably means that feature or setting is not compatible with the currently attached device. For example, the UART2 box is grayed out in the image above. The NEO-M8P does not have a second UART so you can’t address it.
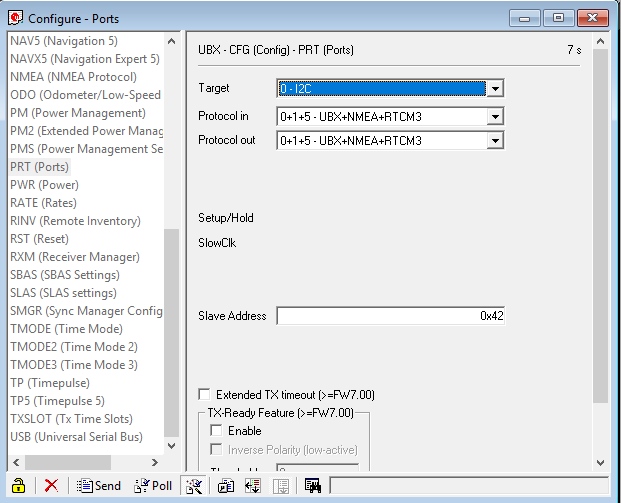
Ports
The Ports (PRT) sub-menu under Configuration is very helpful. You can do things like change the baud rate, I2C address, and protocols. Depending on your application, you may want to enable or disable entire interface protocols. For example, if you want to enable NMEA sentences for the SPI interface, you would do it here. Fortunately, the factory default for the NEO-M8P is good for I2C and UART1 for RTK purposes (input of RTCM3 is enabled for both ports).
This is also the menu that allows you to change the I2C address of your GPS-RTK. Because we are big fans of the Qwiic system, we’ll be using the GPS-RTK on the I2C bus. If we had another device on the bus that uses address 0x42 this menu will allow us to change the address of the GPS-RTK.
Poke around the various config menus. If you get your module into an unknown state you can unplug and replug to reset the settings.
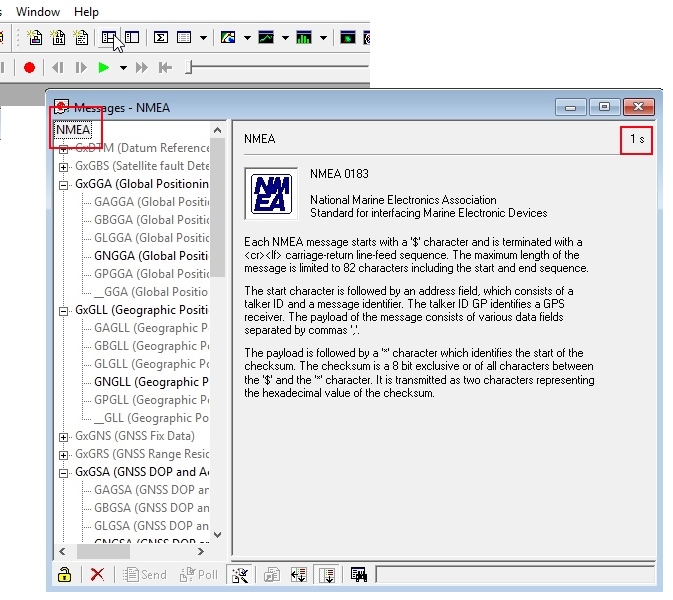
Messages
The messages window will allow you to view the various sentences reported by the module. It’s not obvious but if you double click on ‘NMEA’, the tree of messages will fold away. Similarly, if you double click on ‘UBX’, it will expand showing the various UBX sentences. By default, many of these are not enabled.
Resources and Going Further
Ready to get hands-on with GPS?
We’ve got a page just for you! We’ll walk you through the basics of how GPS works, the hardware needed, and project tutorials to get you started.
Once you’ve mastered U-Center you’re ready to begin configuring your Ublox module! Check out some of these related tutorials:Building an Autonomous Vehicle: The BatmobileDocumenting a six-month project to race autonomous Power Wheels at the SparkFun Autonomous Vehicle Competition (AVC) in 2016.GPS-RTK Hookup GuideFind out where you are! Use this easy hook-up guide to get up and running with the SparkFun high precision GPS-RTK board.GPS-RTK2 Hookup GuideGet precision down to the diameter of a dime with the new ZED-F9P from Ublox.
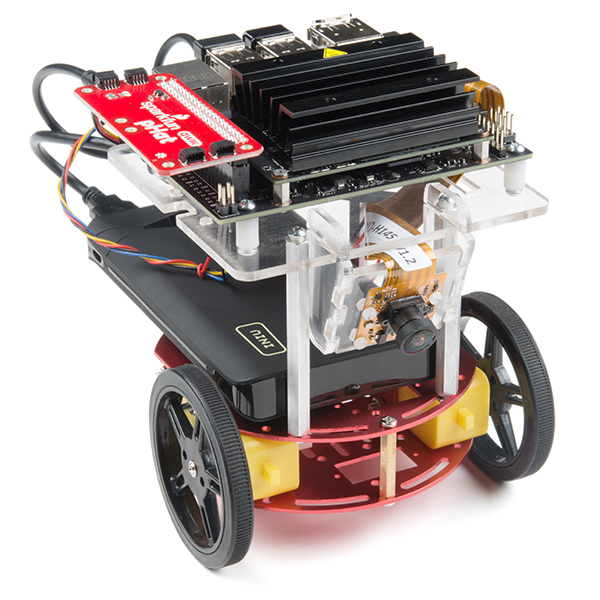
SparkFun’s version of the JetBot merges the industry leading machine learning capabilities of the NVIDIA Jetson Nano with the vast SparkFun ecosystem of sensors and accessories. Packaged as a ready to assemble robotics platform, the SparkFun JetBot Kit requires no additional components or 3D printing to get started – just assemble the robot, boot up the Jetson Nano, connect to WiFi and start using the JetBot immediately. This combination of advanced technologies in a ready-to-assemble package makes the SparkFun JetBot Kit a standout, delivering one of the strongest robotics platforms on the market. This guide serves as hardware assembly instructions for the two kits that SparkFun sells; Jetbot including Jetson Nano & the Jetbot add-on kit without the NVIDIA Jetson Nano. The SparkFun JetBot comes with a pre-flashed micro SD card image that includes the Nvidia JetBot base image with additional installations of the SparkFun Qwiic Python library, Edimax WiFi driver, Amazon Greengrass, and the JetBot ROS. Users only need to plug in the SD card and set up the WiFi connection to get started.
Note: We recommend that you read all of the directions first, before building your Jetbot. However, we empathize if you are just here for the pictures & a general feel for the SparkFun Jetbot. We are also those people who on occasion void warranties & recycle unopened instructions manuals. However, SparkFun can only provide support for the instructions laid out in the following pages.
Attention: The SD card in this kit comes pre-flashed to work with our hardware and has the all the modules installed (including the sample machine learning models needed for the collision avoidance and object following examples). The only software procedures needed to get your Jetbot running are steps 2-4 from the Nvidia instructions (i.e. setup the WiFi connection and then connect to the Jetbot using a browser). Please DO NOT format or flash a new image on the SD card; otherwise, you will need to flash our image back onto the card.
If you accidentally make this mistake, don’t worry. You can find instructions for re-flashing our image back onto the SD card in the software section of the guide
The Jetson Nano Developer Kit offers extensibility through an industry standard GPIO header and associated programming capabilities like the Jetson GPIO Python library. Building off this capability, the SparkFun kit includes the SparkFun Qwiic pHat for Raspberry Pi, enabling immediate access to the extensive SparkFun Qwiic ecosystem from within the Jetson Nano environment, which makes it easy to integrate more than 30 sensors (no soldering and daisy-chainable).
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
Materials
The SparkFun Jetbot Kit contains the following pieces; roughly top to bottom, left to right.
Part
Qty
Circular Robotics Chassis Kit (Two-Layer)
1
Lithium Ion Battery Pack – 10Ah (3A/1A USB Ports)
1
Ball Caster Metal – 3/8″
1
Edimax 2-in-1 WiFi and Bluetooth 4.0 Adapter
1
Header – male – PTH – 40 pin – straight
1
2 in – 22 gauge solid core hookup wire (red)
1
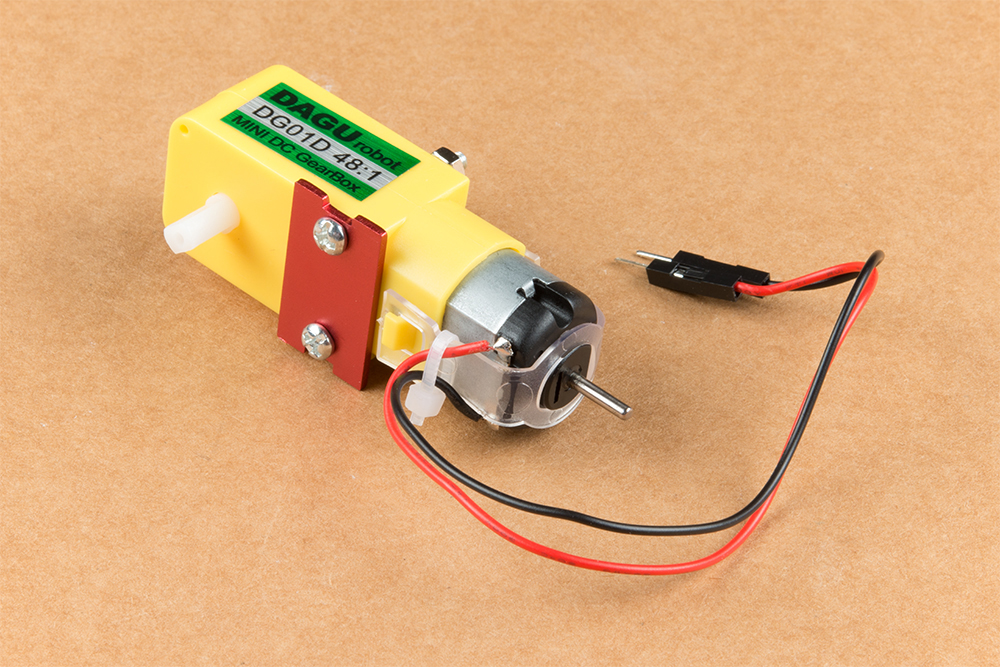
Shadow Chassis Motor (pair)
1
Jetson Dev Kit (Optional)
1
SparkFun JetBot Acrylic Mounting Plate
1
SparkFun Jetbot image (Pre Flashed)
1
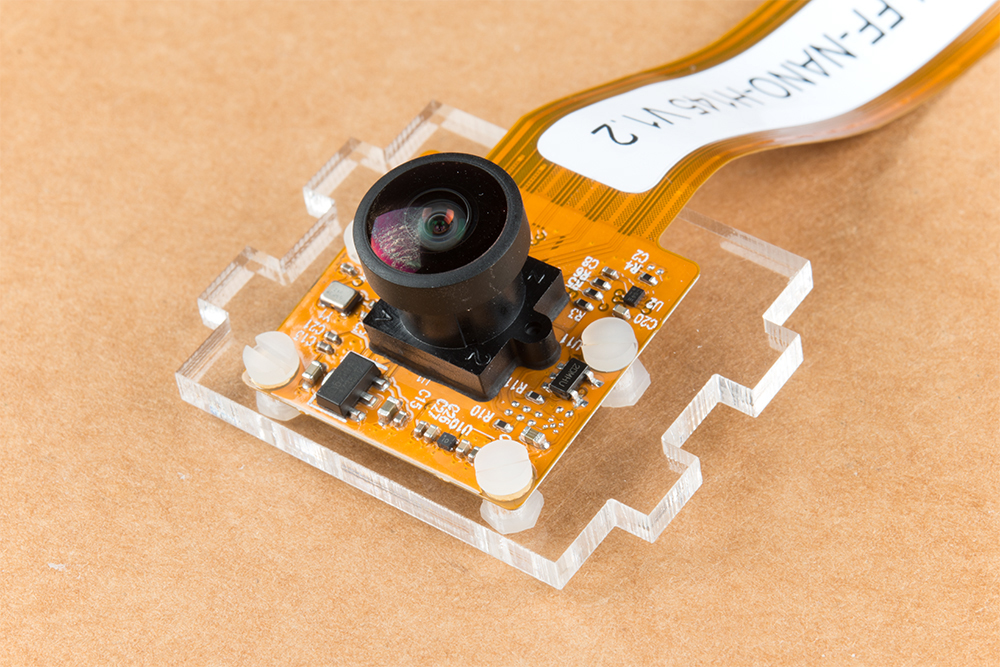
Leopard Imaging 145 FOV Camera
1
Screw Terminals 2.54mm Pitch (2-Pin)
2
SparkFun Micro OLED Breakout (Qwiic)
1
SparkFun microB USB Breakout
1
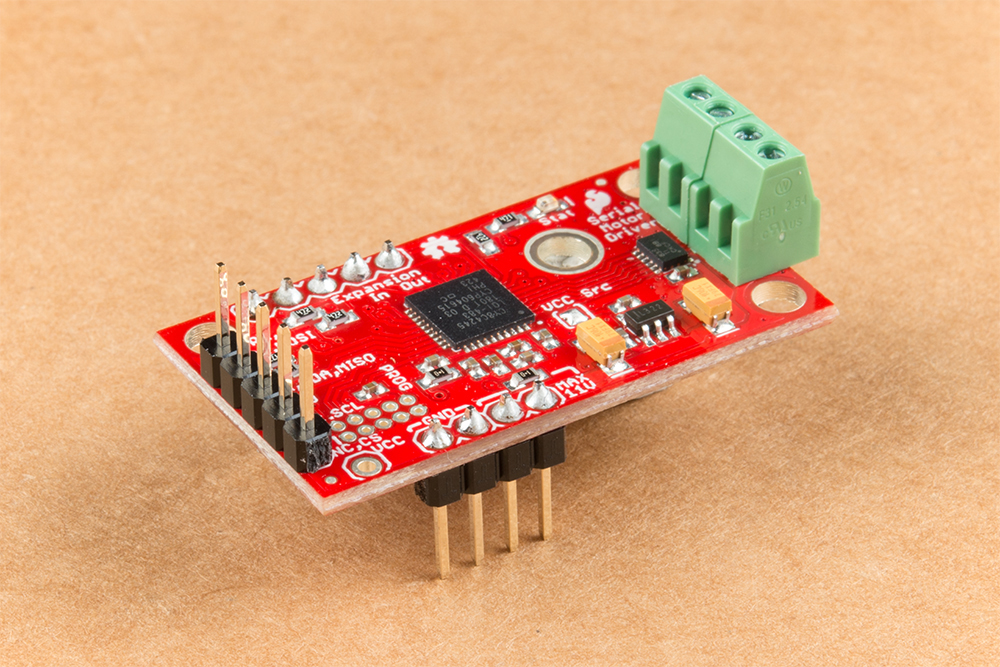
SparkFun Serial Controlled Motor Driver
1
Breadboard Mini Self-Adhesive Red
1
SparkFun Qwiic HAT for Raspberry Pi
1
SparkFun JetBot Acrylic sidewall for camera mount
2
SparkFun JetBot Acrylic Camera mount & 4x nylon mounting hardware
1
Qwiic Cable – 100mm
1
Qwiic Cable – Female Jumper (4-pin)
1
Wheels & Tires – included as part of circular robotics chassis
2
USB Micro-B Cable – 6″
2
Dual Lock Velcro
1
The SparkFun Jetbot Kit contains the following hardware; roughly top to bottom, left to right.
We did not include any tools in this kit because if you are like us you are looking for an excuse to use the tools you have more than needing new tools to work on your projects. That said, the following tools will be required to assemble your SparkFun Jetbot.
Small phillips & small flat head head screwdriver will be needed for chassis assembly & to tighten the screw terminal connections for each motor. We reccomend the Pocket Screwdriver Set; TOL-12268.
Pair of scissors will be needed to cut the adhesive Dual Lock Velcro strap to desired size; recommended, but not essential..
Soldering kit for assembly & configuration of the SparkFun Serial Controlled Motor Driver – example TOL-14681
Optional– adjustable wrench or pliers to hold small components (nuts & standoffs) in place while tightening screws; your finger grip is usually enough to hold these in place while tightening screws & helps to ensure nothing is over tightened.A Note About Directions
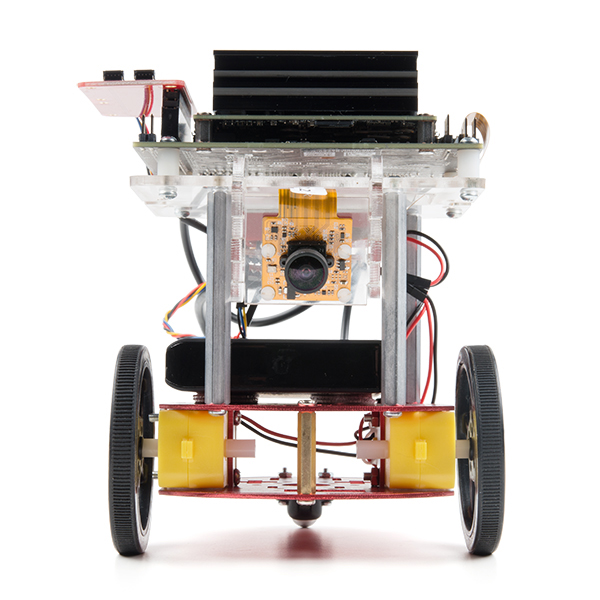
When we talk about the ”front,” or ”forward” of the JetBot, we are referring to direction the camera is pointed when the Jetbot is fully assembled. ”Left” and ”Right” will be from the perspective of the SparkFun Jetbot.
If you prefer to follow along with a video, check out this feature from the chassis product page. You do not need to use the included ball caster as a larger option has been provided for smoother operation.
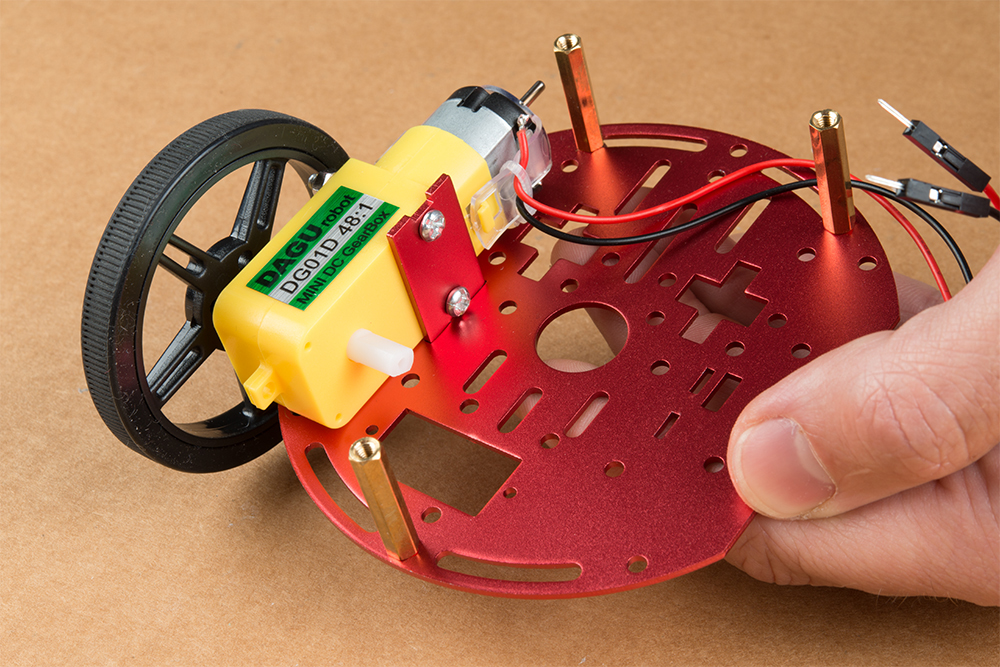
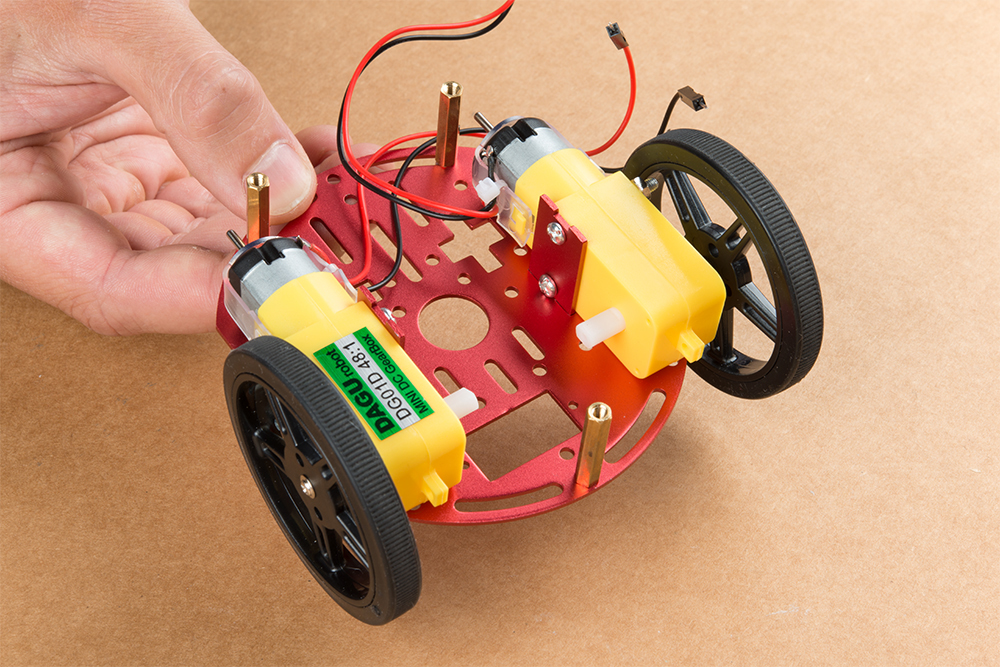
Start by attaching the chassis motor mount tabs to each of the ”Shadow Chassis Motors (pair)” using the long threaded machine screws & nuts included with the Circular Robotics Chassis Kit.
Fit the rubber wheels onto the hubs, install the wheel onto each motor, & fix them into position using the self tapping screws included with the Circular Robotics Chassis Kit.
Install the brass colored standoffs included with the Circular Robotics Chassis Kit; two in the rear and one in the front. The rear of the SparkFun Jetbot will be on the side of the plate with the two ”+” sign cut outs. The rear of the motor will be opposite the wheel where the spindle extends. This orientation ensures the widest base & most stable set up for your Jetbot.
The motor mounts fit into two mirrored inlets in each base plate as shown. Install the motors opposite of one another.
Depending on how you install the motor mounts to each motor will dictate how the motor can be installed on the base plate. Note: Do not worry about the motor orientation as you will determine proper motor operation in how you connect the motor leads to the SparkFun Serial Controlled Motor Driver. Notice how in the picture below one motor has the label facing up, while the other has the label facing down.
Place the other circular robot chassis plate on top of and align the two ”+” and the motor mount tab recesses. Hold the sandwiched chassis together with one hand and install the remaining Phillips head screws included with the Circular Robotics Chassis Kit through the top plate & into the threaded standoffs.
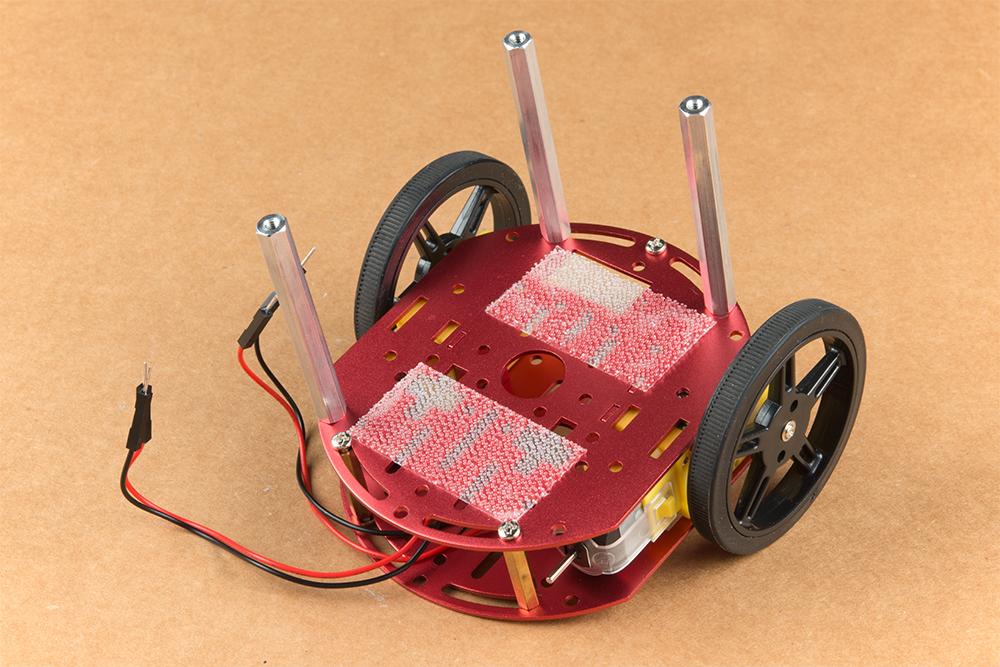
Your main chassis is now assembled! The Circular Robotics Chassis Kit also contains a very small caster wheel assembly, but we have included a larger metal caster ball to increase the stability of the SparkFun Jetbot. We will cover the installation of this caster ball later in the tutorial.
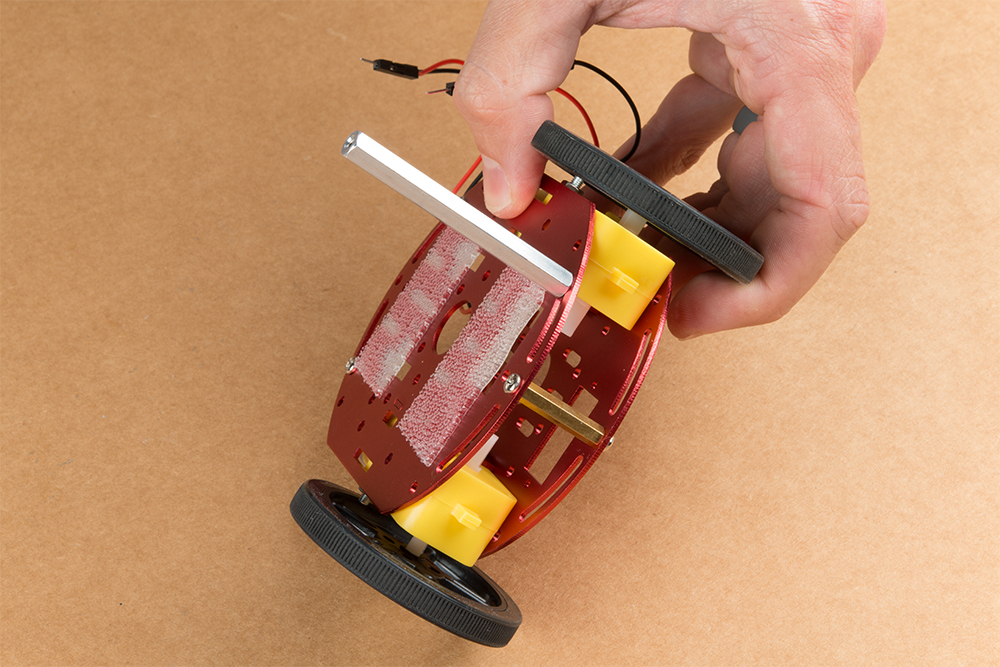
Utilize three of the included 1/4 in 4-40 Phillips Screws through the top chassis plate with threads facing up & install the 2-3/8 in #4-40 Aluminum Hex Standoff until they are finger tight.
The aluminum stand offs should be pointing up as shown below.
The SparkFun JetBot acrylic mounting plate is designed to have two of these aluminum standoffs in the front & one in the rear. We recommend the rear standoff on the left side of the chassis (as shown) so the 6 in microB usb cables that will be installed later can more easily span the gap needed to power the JetBot.
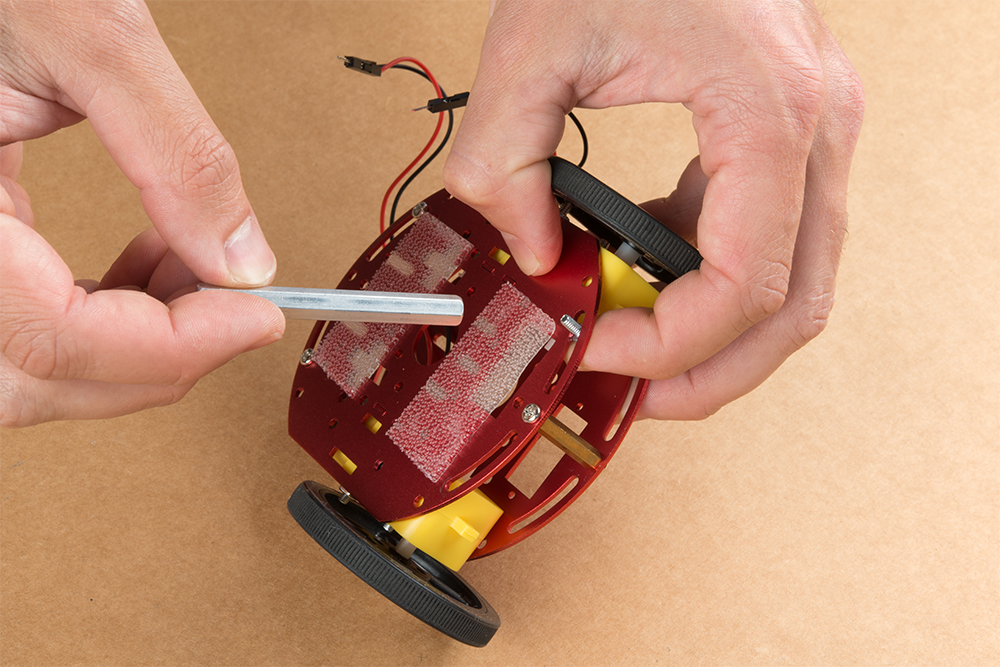
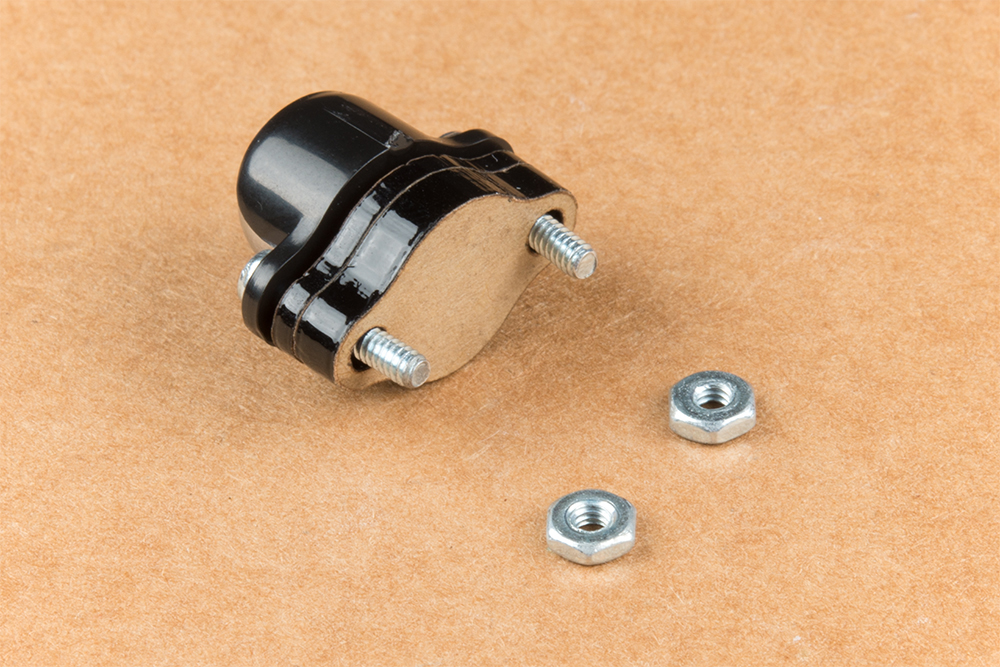
Un-package the 3/8 in Metal Caster Ball and thread the mounting screws through all pieces as shown. Note the full stack height will help balance the Jetbot in a stable position.
Install the caster wheel using the Phillips head screws and nuts included with the 3/8 in caster ball assembly. The holes on the caster assembly are spaced to fit snug on the innermost segment of the angular slots near the rear of the lower plate on the JetBot chassis. Again, hand tight is just fine. Note: if you over tighten these screws it will prevent the ball from easily rotating in the plastic assembly. However, too loose and it may un-thread; go for what feels right
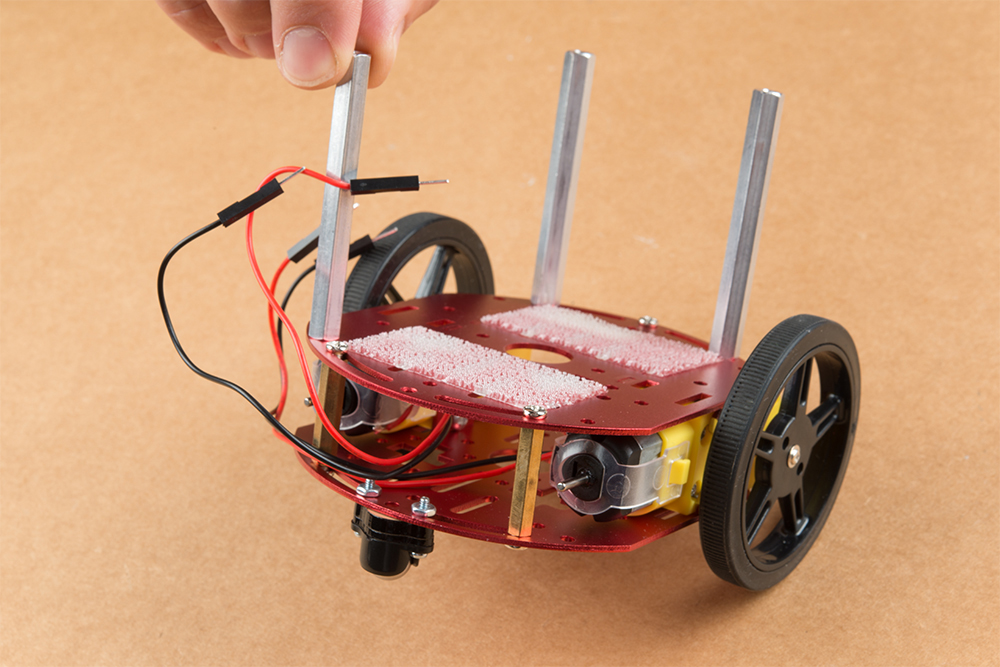
After you have installed the caster & aluminum standoffs, thread the motor wires through the back of the chassis standoffs for use later.
2. Camera Assembly & Installation
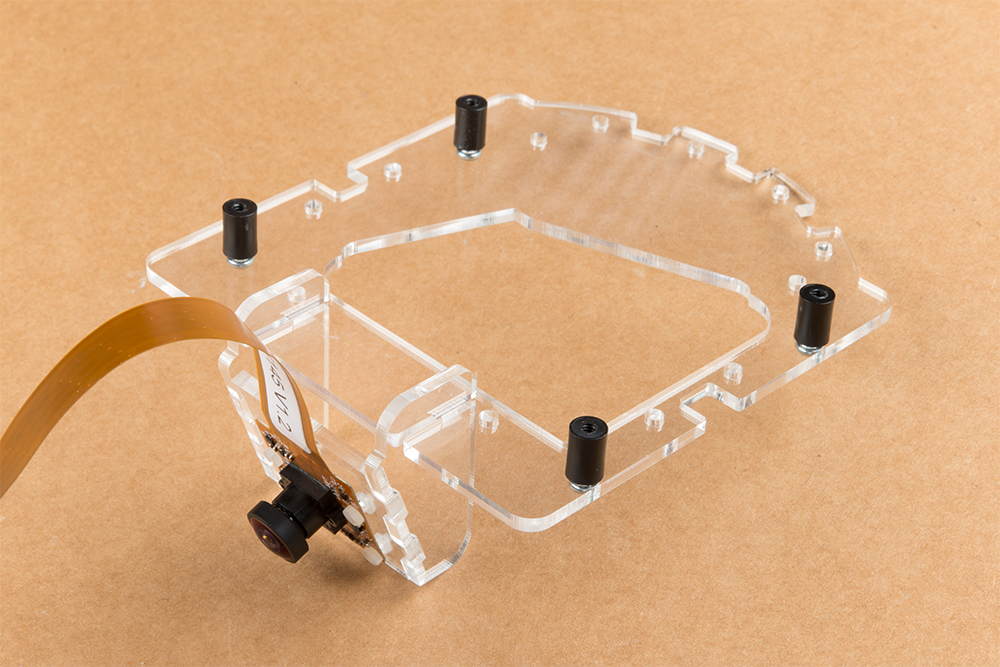
Unpackage the Leopard Imaging camera & align the four holes in the acrylic mounting plate with those on the camera.
Note: ensure that the ribbon cable is extending over the acrylic plate on the edge that does not have mounting holes near the edge; as shown below.
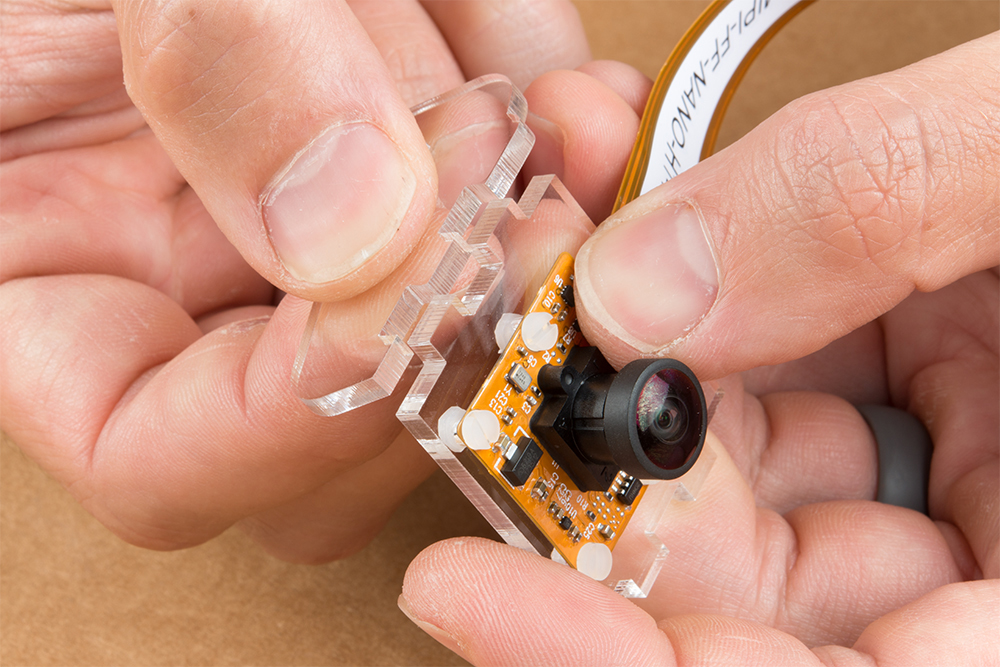
Place all four nylon flathead screws through the camera & acrylic mounting plate prior to fully tightening the nylon nuts. This will ensure equal alignment across all four screws. Tighten the screws while holding the nuts with finger pressure in a rotating criss cross pattern; similar to how you tighten lug nuts on a car rim.
Align one acrylic sidewall with the camera mounting plate as shown below ensuring that the widest section of the sidewall is oriented to the top of the camera mount where the ribbon cable extends.
Apply even pressure on each piece until they fit together. Note: these pieces are designed to have an interference fit and will have a nice, satisfying ”click” when they fit together.
Repeat this process on the other side to fully assemble the camera mount.
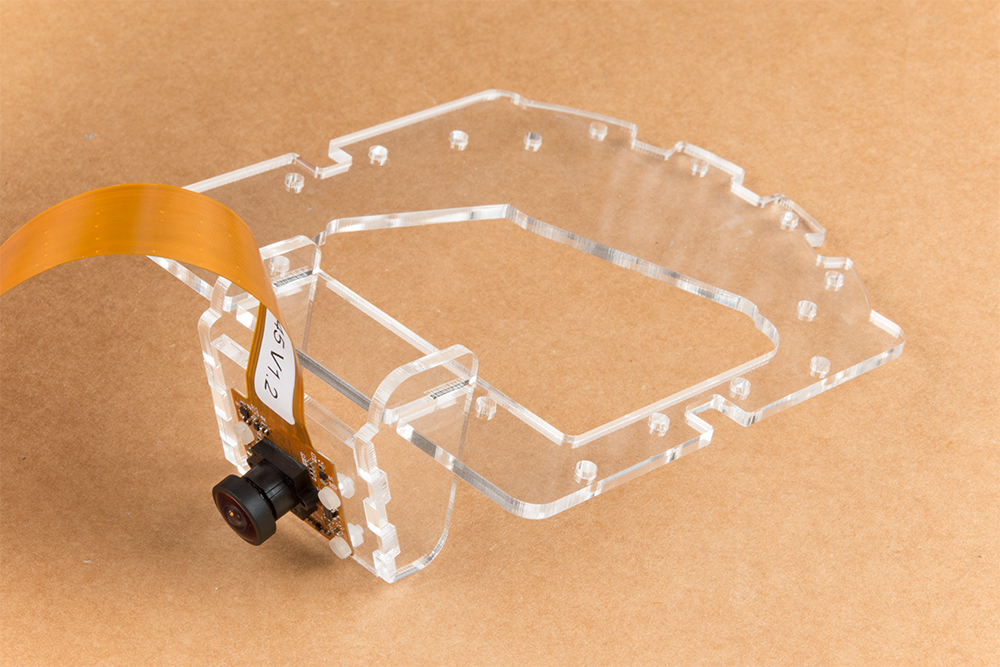
The camera mount should now be installed to the SparkFun Jetbot acrylic mounting plate using the overlapping groove joints. Ensure that the cut out on the acrylic mounting plate is facing towards the front/right of the Jetbot as shown. This will ensure that there is plenty of room for the camera ribbon cable to pass around the assembly and up to the Jetson nano camera connector.
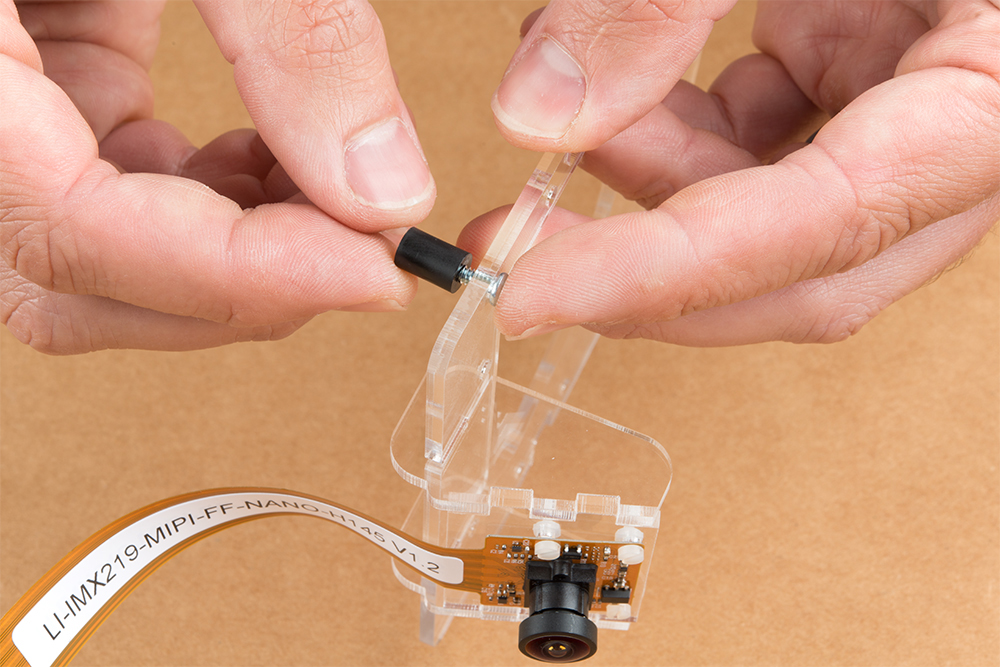
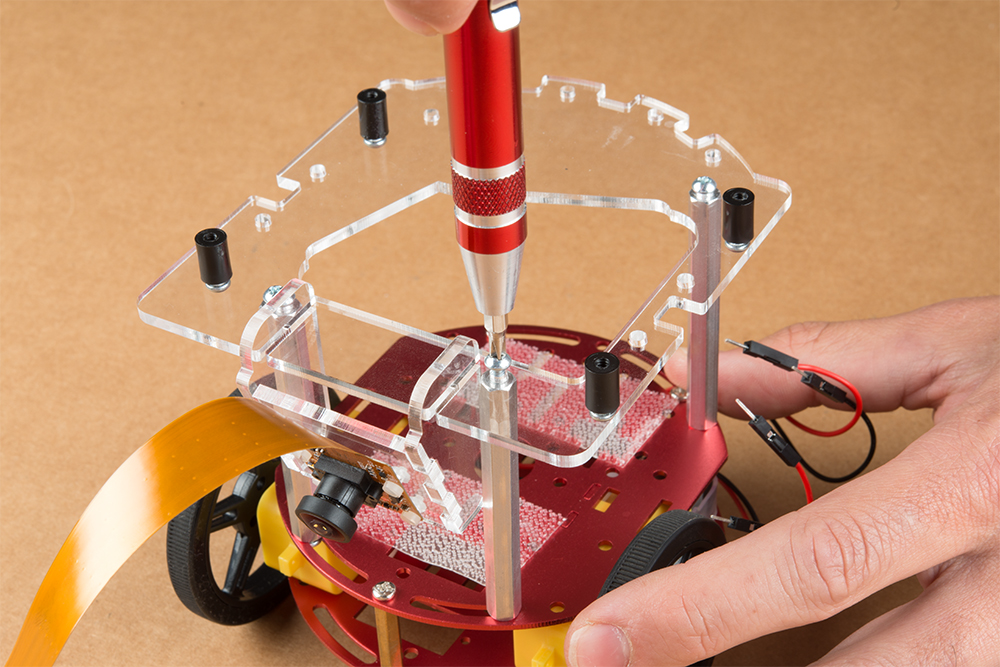
Install four of the nylon standoffs to the top of the SparkFun Jetbot acrylic mounting plate using four of the included 1/4 in 4-40 Phillips head screws as shown below.
Utilize three more of the 1/4 in 4-40 Phillips head screws to install the SparkFun Jetbot acrylic mounting plate to the aluminum standoffs extending from the Two-layer circular robotics chassis as shown below.
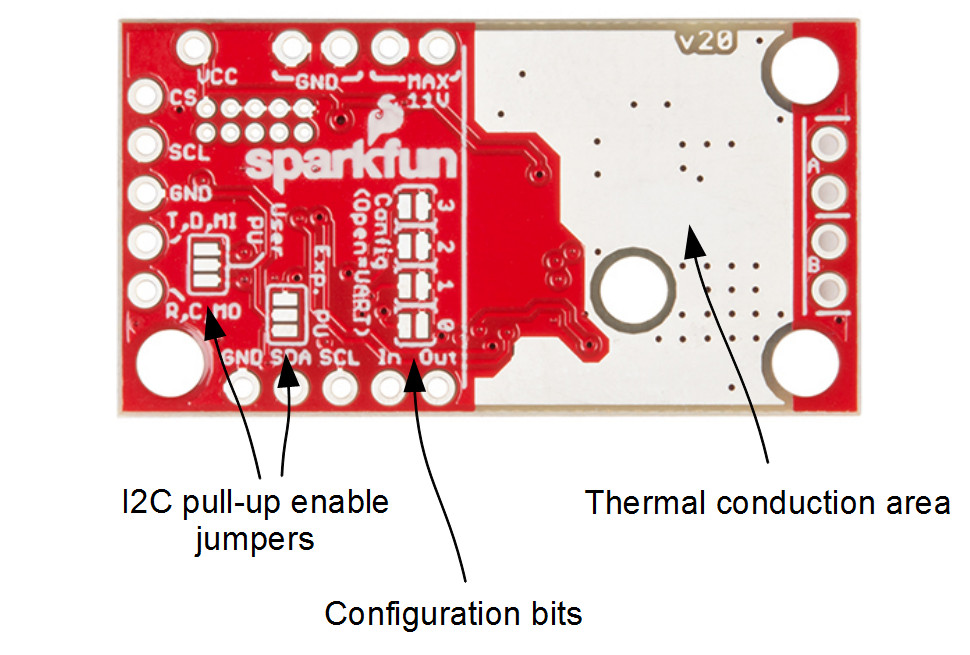
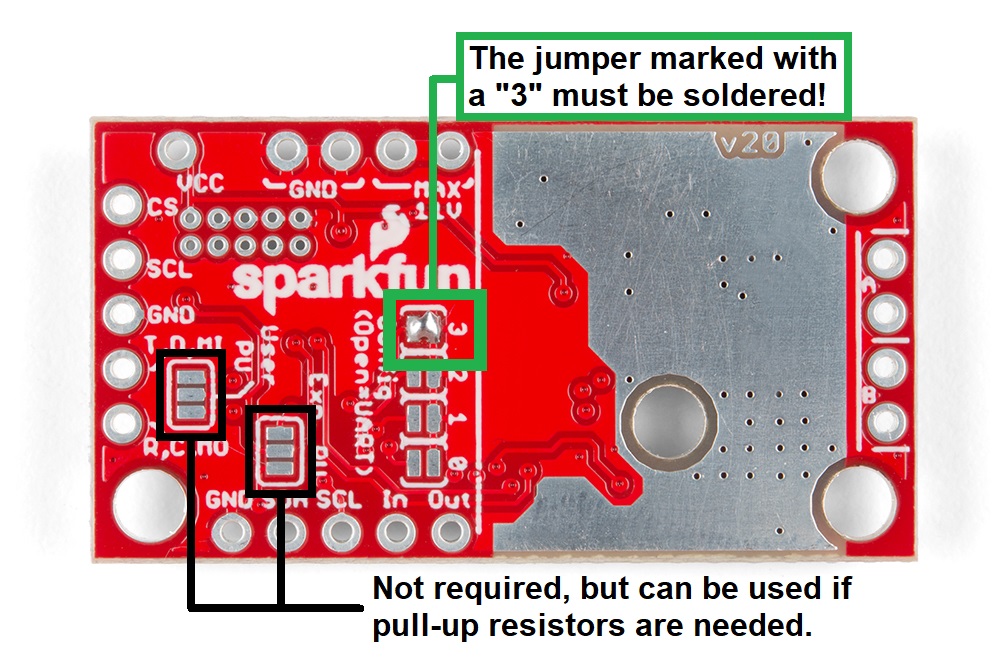
You will need to solder both triple jumpers labeled below as ”I2C pull-up enable jumpers” as the SparkFun pHat utilizes the I2C protocol. The default I2C address that is used by the pre-flashed SparkFun Jetbot image is 0x5D which is equavalent to soldering pad #3 noted as ”configuration bits” on the back of the SparkFun serial controlled motor driver; see below. You will need to create a solder jumper on pad #3 only for the SparkFun Jetbot Image to work properly.
Layout of jumpers on the Serial Controlled Motor Driver.
Jumper 3 of theConfiguration Bitsproperly soldered.
Your completed Serial Controlled motor drive should look somewhat similar to the board shown below.
The 2-pin screw terminals are soldered to the ”Motor Connections.”
Break off 4 Male PTH straight headers and solder into the ”Power (VIN) connection” points.
Break off 5 Male PTH straight headers and solder into the ”Expansion port” points. These will not be used, but will provide additional board stability when installed into the mini breadboard.
Break off 5 Male PTH straight headers and solder into the ”User port” points for connection into the included Female Jumper Qwiic cables.
Break off 5 Male PTH straight headers and solder into the breakout points on the SparkFun microB USB Breakout.
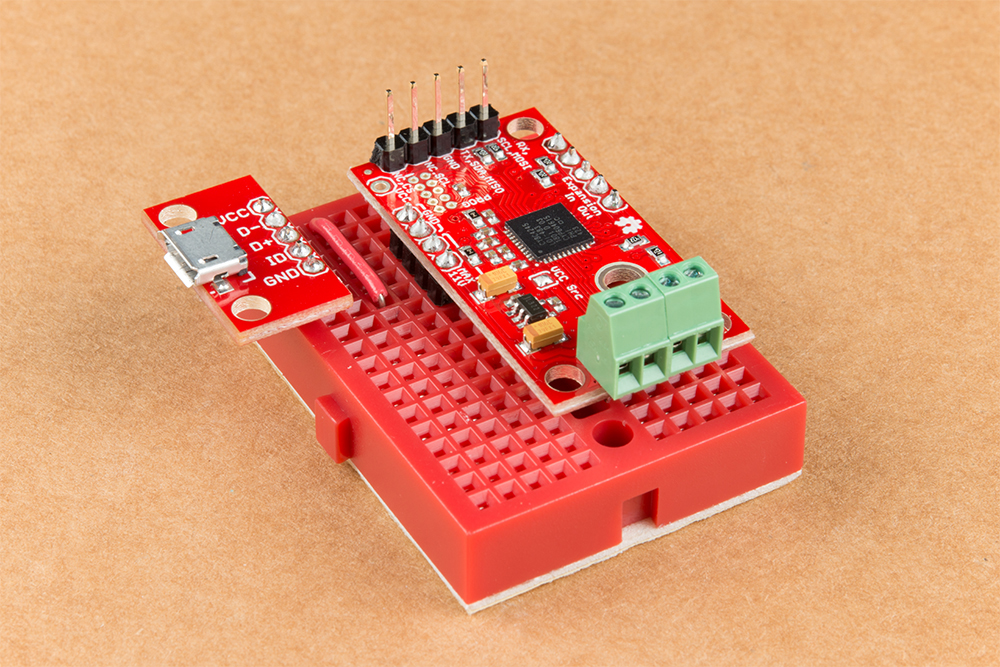
Install both the SparkFun Serial Controlled Motor Driver & the SparkFun microB Breakout board on the included mini breadboard so the ”GRD” terminals for each unit share a bridge on one side of the breadboard.
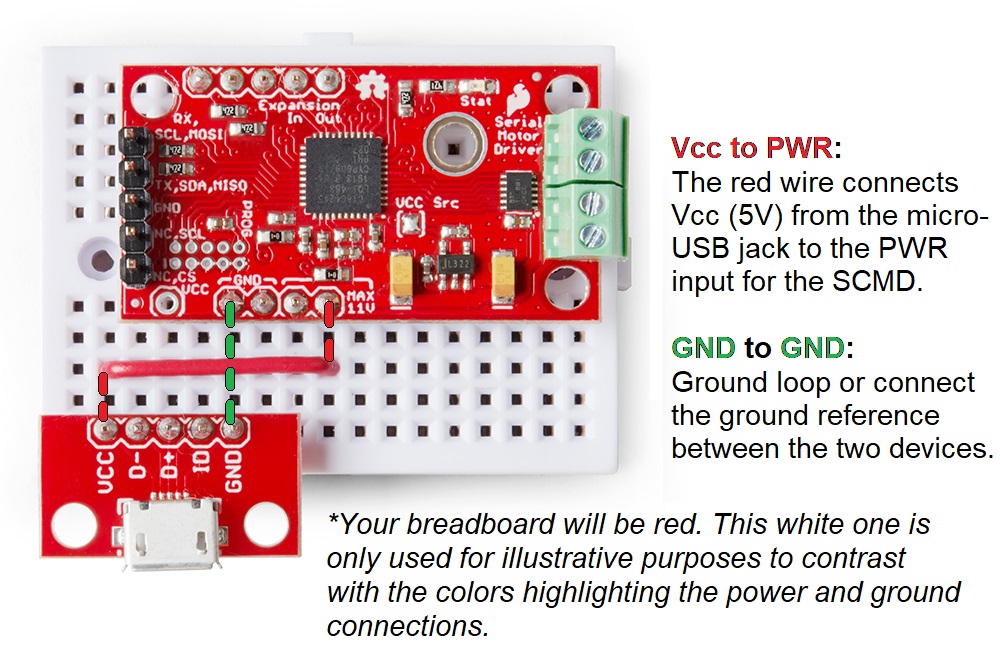
Utilize the included 2 in – 22 gauge solid core hookup wire (red) to bridge the ”VCC” pin for the SparkFun microB Breakout to either (VIN) connection point on the SparkFun Serial Controlled Motor Driver as shown below.
Required power connections between the micro-USB breakout and the Serial Controlled Motor Driver.
Competed assembly of the micro-USB breakout and Serial Controlled Motor Driver on the breadboard.
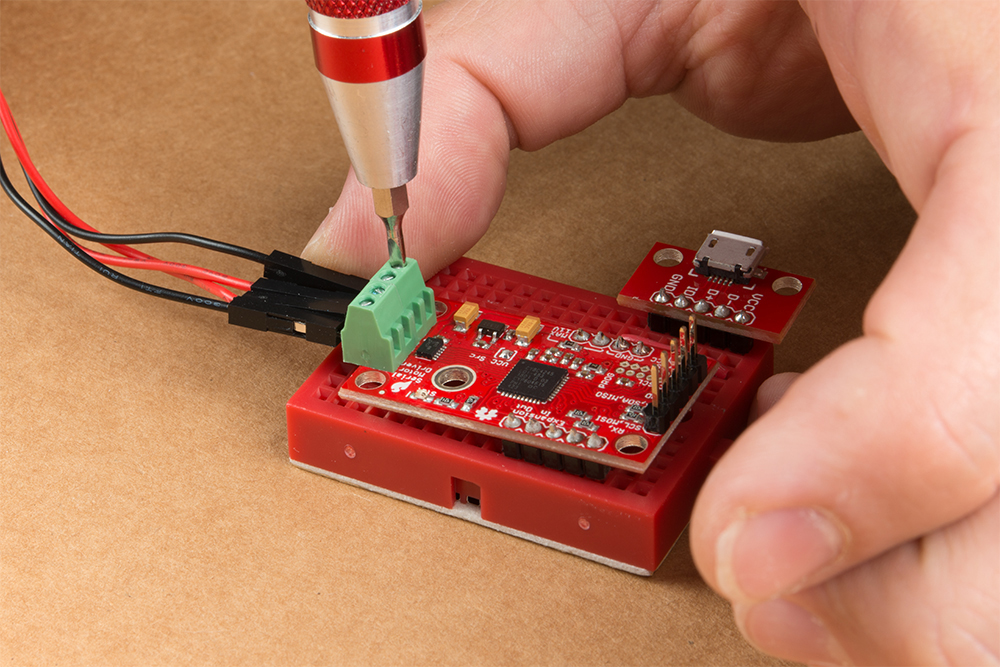
Utilize a small flat head screwdriver to loosen the four connection points on the screw terminals. When inserting the motor connection wires, note the desired output given the caution noted in section #1 of this assembly guide.
Note from section #1: Do not worry about the motor orientation as you will determine proper motor operation in how you connect the motor leads to the SparkFun Serial Controlled Motor Driver.
These connection points can be corrected when testing the robot functionality. If your Jetbot goes straight when you expect Jetbot to turn or vice versa, your leads need to be corrected.
Set this assembly aside for full installation later.
4. Accessory Installation to Main Chassis
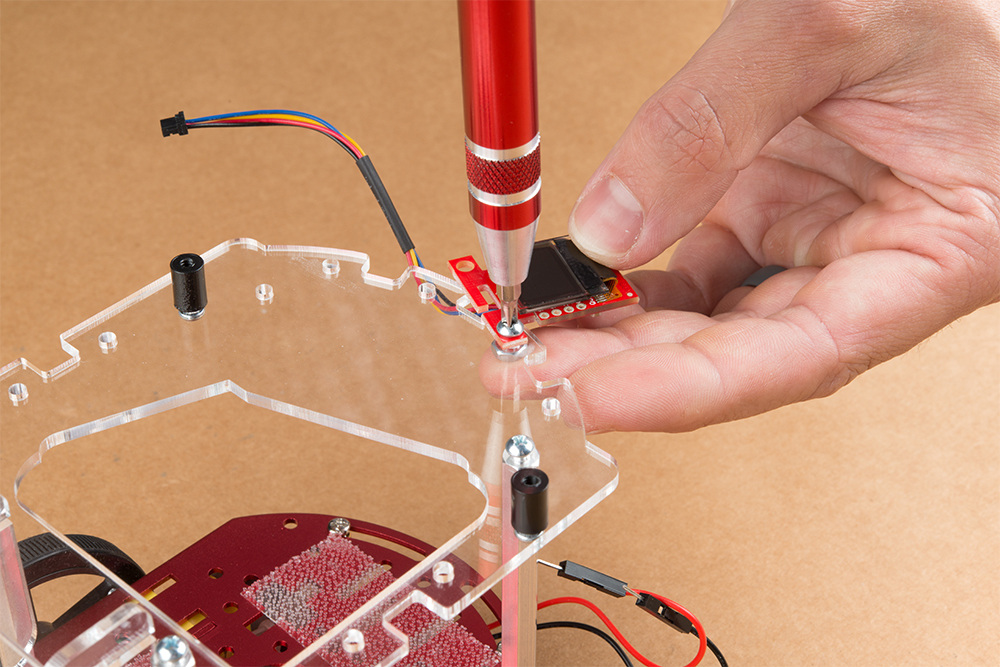
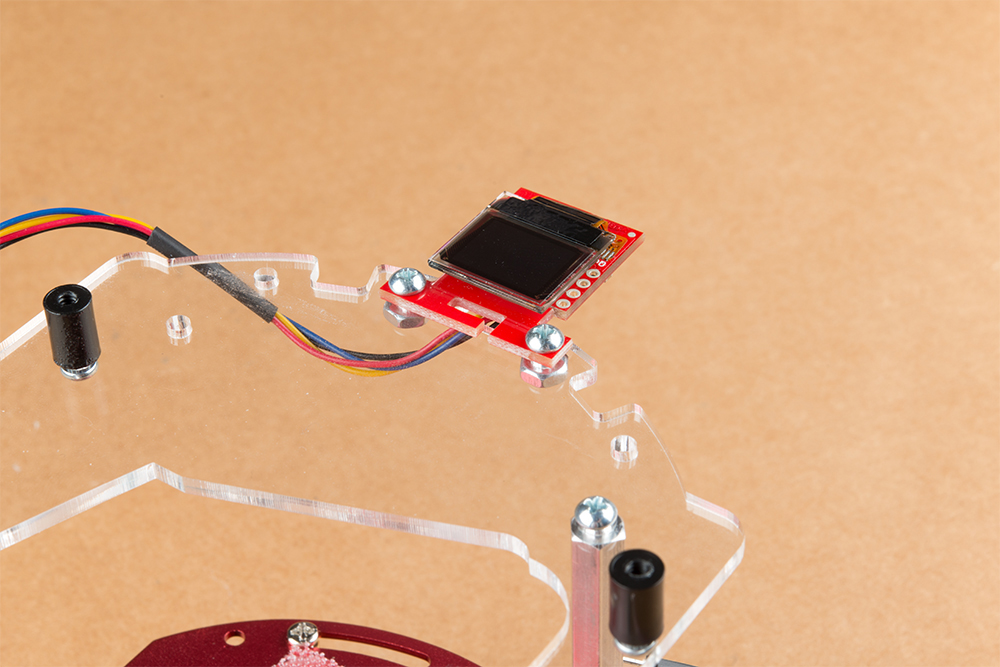
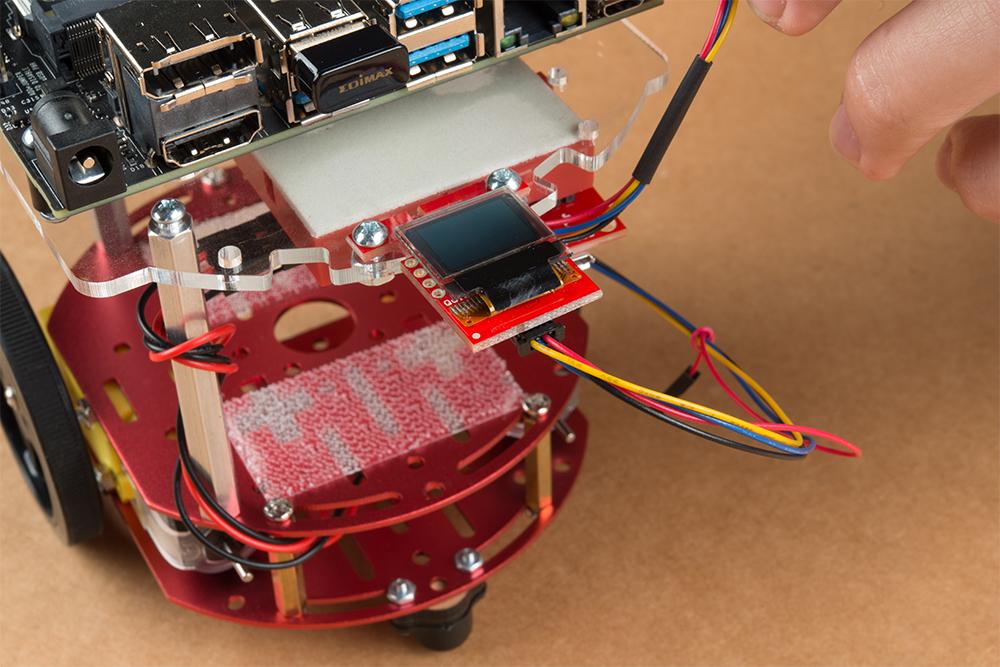
Align the mounting holes on the SparkFun Micro OLED (Qwiic) with those on the back of the SparkFun Jetbot acrylic mounting plate. Install the Micro OLED using two 1/4 in 4-40 Phillips head screws and two 4-40 machine screw nuts.
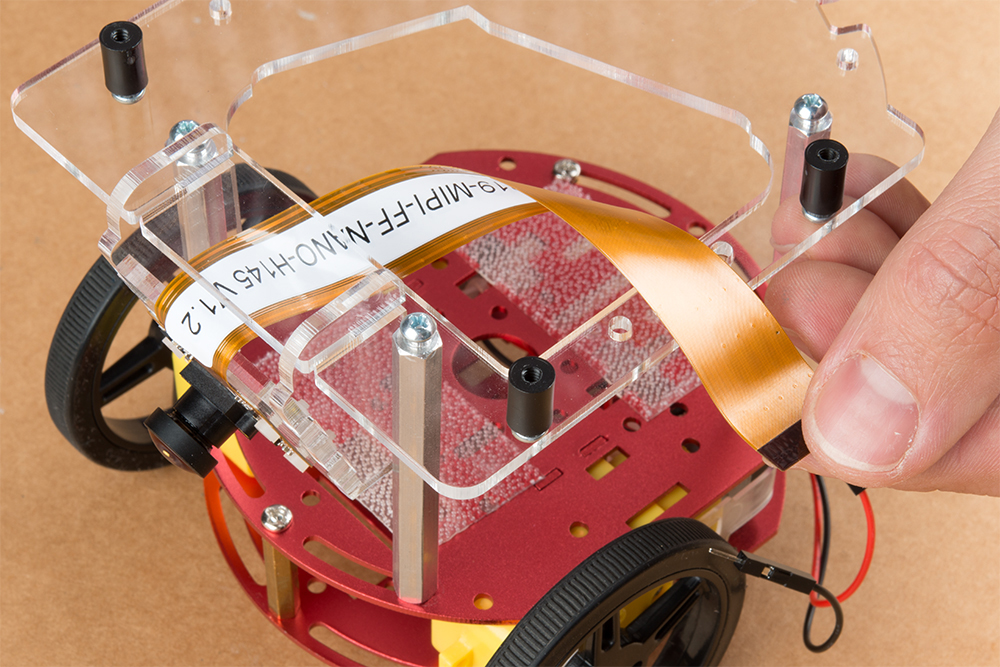
Thread the ribbon cable of the Leopard imaging camera back through the acrylic mounting plate and half-helix towards the left side of the Jetbot.
Install the Jetson Nano Dev kit to the nylon standoffs using four 1/4 in 4-40 Phillips head screws. Tighten each screw slightly in a criss-cross pattern to ensure the through holes do not bind during install until finger tight. Make sure you can still access the camera ribbon cable.
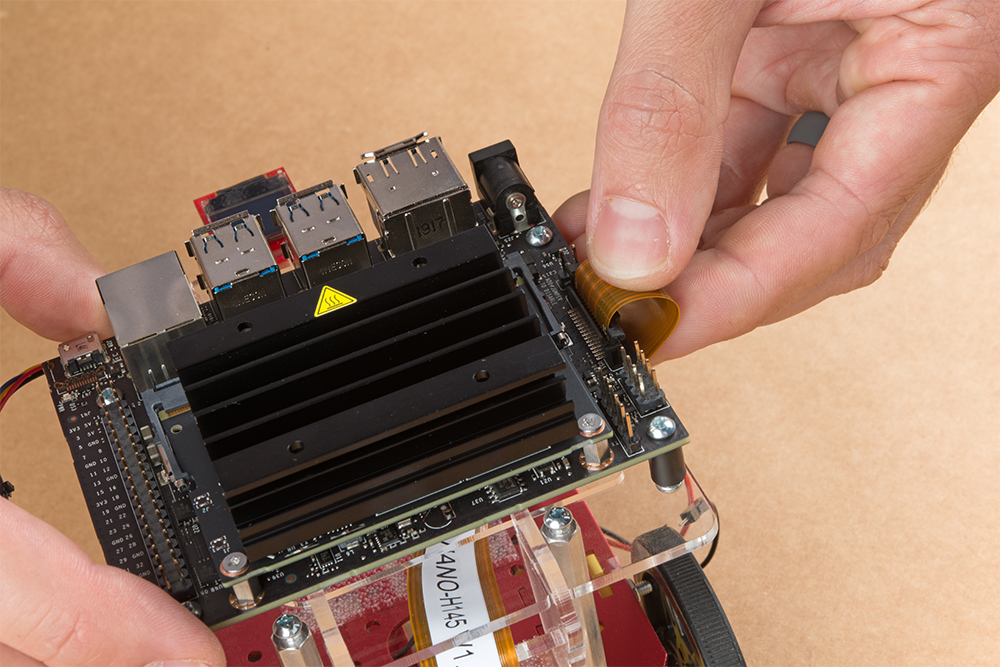
Note: the camera connector is made from small plastic components & can break easier than you think. Please be careful with this next step.
Loosen the camera connector with a fingernail or small flathead screwdriver. Fit the ribbon cable into this connector and depress the plastic press fit piece of the connector to hold the ribbon cable in place.
Unpackage & install the USB Wifi adaptor into one of the USB ports on the Jetson nano Dev Kit. The drivers for this Wifi adaptor are pre-installed on the SparkFun Jetbot image. If you are making your own image, you will need to ensure you get these from Edimax.
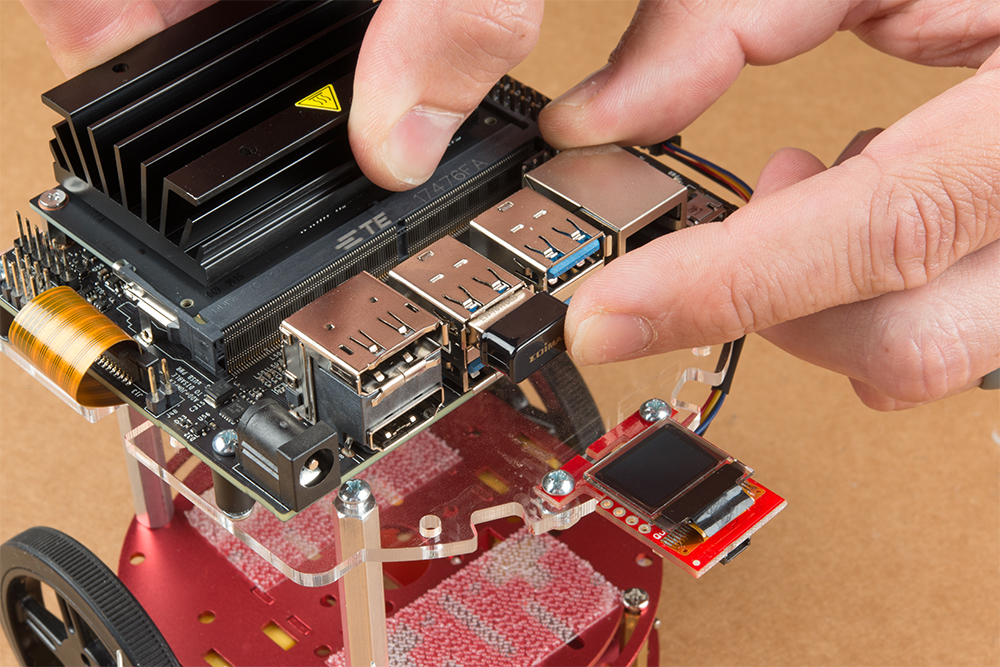
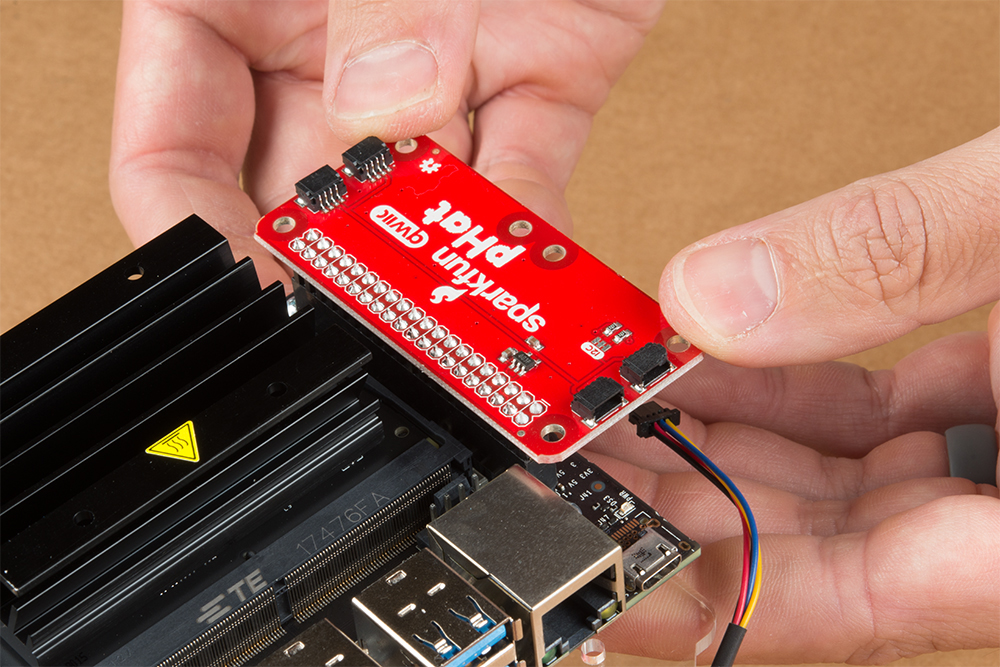
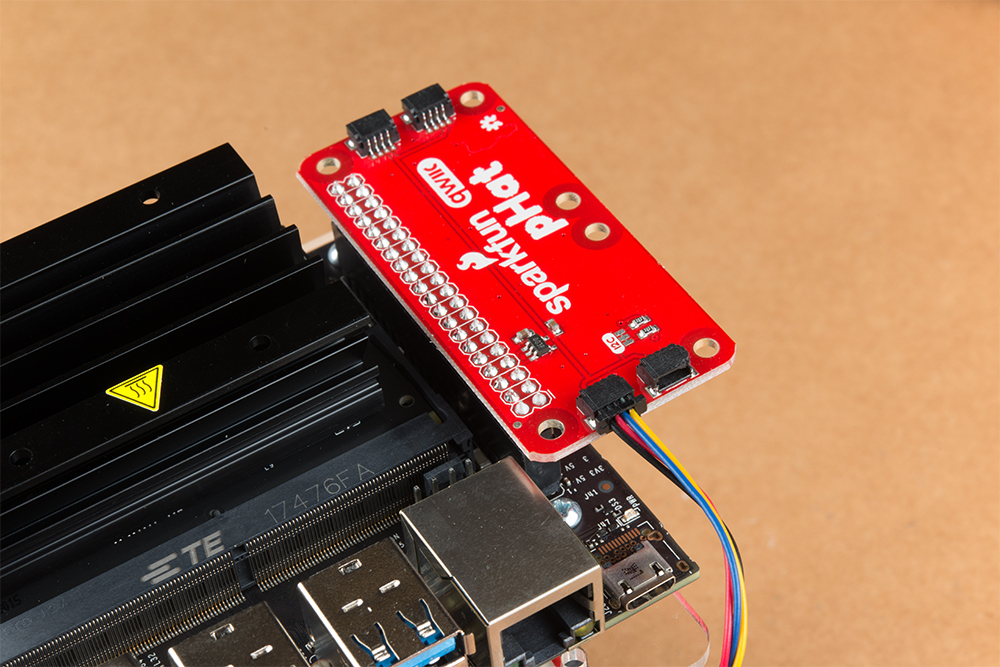
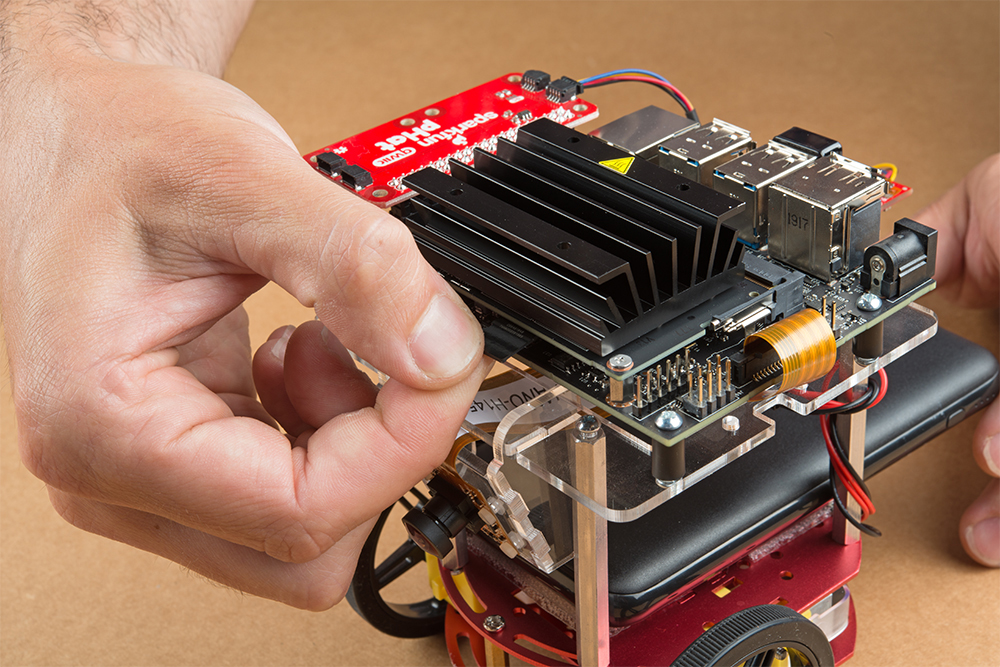
Align the SparkFun pHat with the GPIO headers on the Jetson Nano Dev Kit so that the pHat overhangs the right hand side of the Jetbot. For additional information on hardware assembly of the SparkFun pHat, please reference the hookup guide here.
Note: The heatsink on the Jetson Nano Dev Kit will only allow for one orientation of the SparkFun pHat.
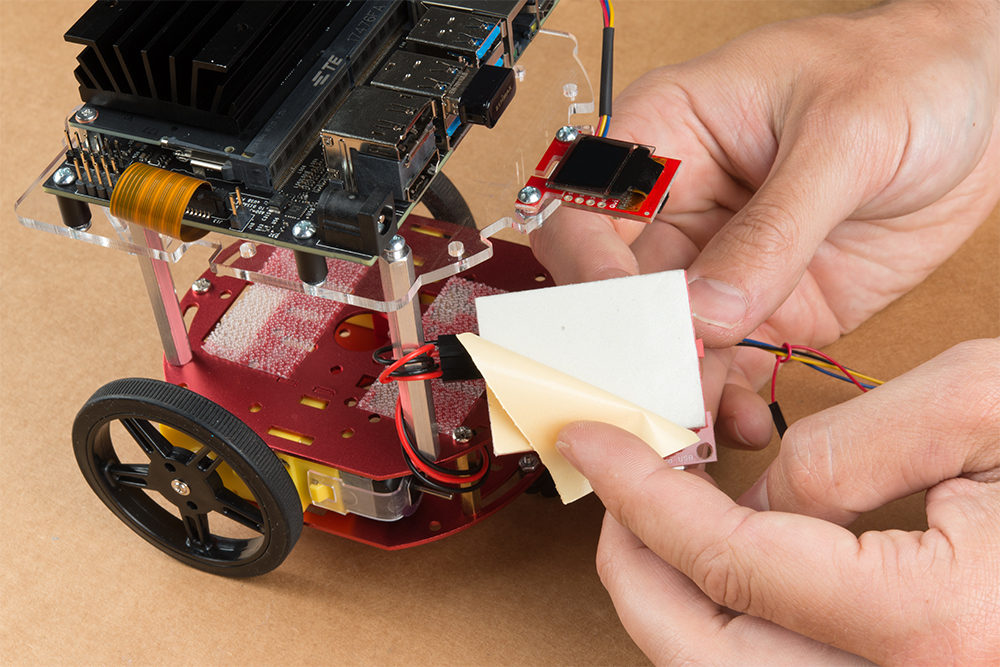
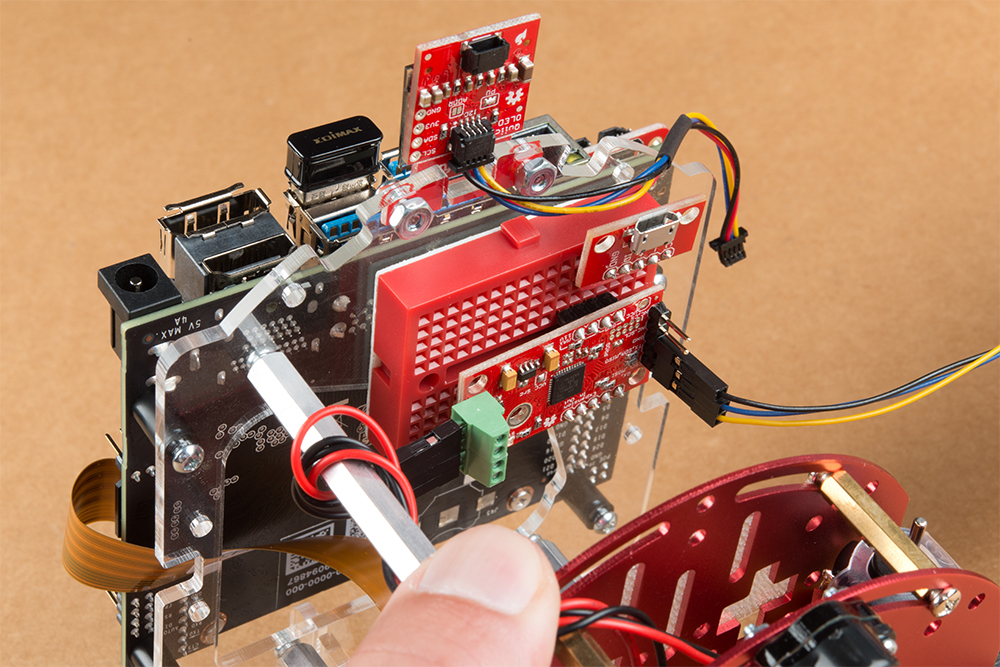
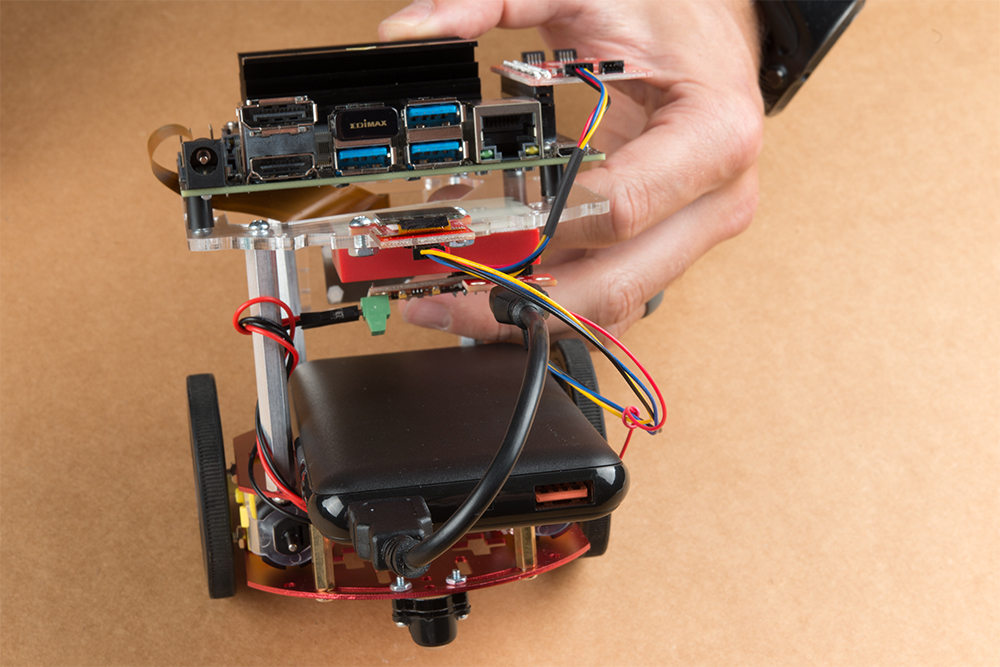
Wrap the motor wires around the rear/left standoff to take up some of the slack; one or two passes should do. Peel the cover off the self adhesive backing on the mini breadboard you set aside at the end of section #3.
Place the breadboard near the back of the Jetbot Acrylic mounting plate where there is good adhesion & access to all the components. Attach the (4-pin) Female Jumper Qwiic cable to the SparkFun Serial Controlled Motor Driver pins as shown. Yellow to ”SCL,” Blue to ”SDA,” Black to ”GND.”
Daisy chain the polarized Qwiic connector on the other end of the (4-pin) Female Jumper Qwiic cable into the back of the SparkFun Micro OLED (Qwiic).
Using the 100mm Qwiic Cable attach the SparkFun Micro OLED front Qwiic connector to the SparkFun pHat as shown.
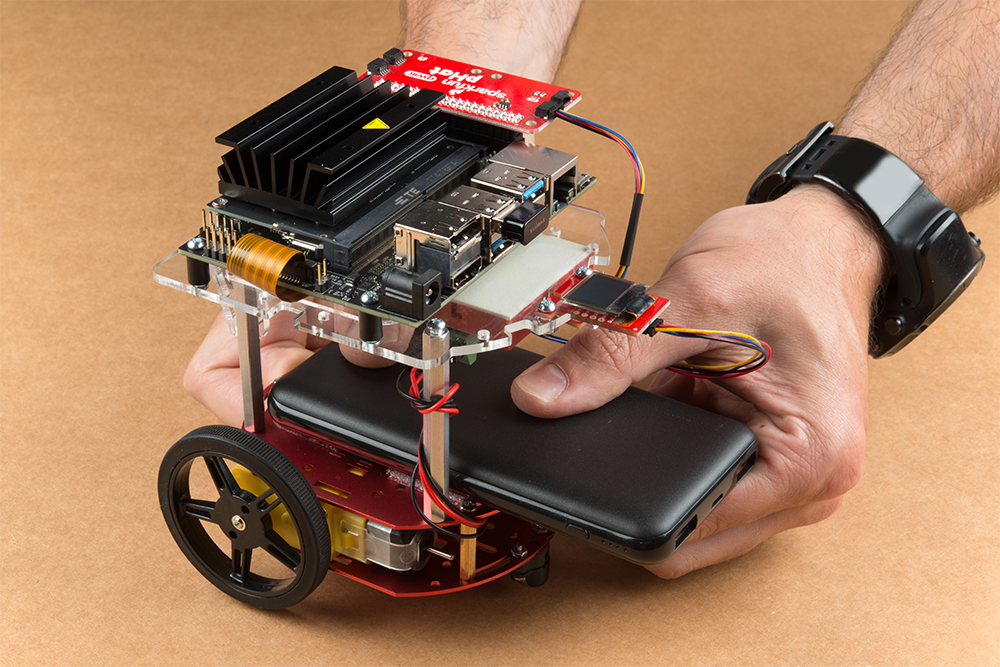
Cut the Dual Lock Velcro into two pieces and align them on the 10Ah battery & top plate of the Two-Layer Circular Robotics Chassis as shown below. Ensure that the USB ports on the battery pack are pointing out the back of the Jetbot. Additionally, the orange port (3A) will need to power the Jetson Nano Dev Kit & therefore will need to be on the right side of the Jetbot.
Apply firm pressure to the battery pack to attach to the Jetbot chassis via the Dual Lock Velcro.
Remove the micro SD card from the SD card adapter.
Insert the micro SD card facing down into the micro SD card slot on the front of the Jetson Nano Dev Kit. Please see the next three pictures for additional details.
The USB ports on the back of the 10Ah battery pack has two differently colored ports. The black port (1A) is used to power the motor driver via the SparkFun microB breakout. Utilize one of the 6 in micro-B USB cables to supply power to the microB breakout.
Note: Once you plug the Jetson Nano Dev Kit into the 3A power port, this will ”Boot Jetson Nano” which is not covered in detail until the links in section #5 of this assembly guide. Do not proceed unless you are ready to move forward with the software setup & examples provided by NVIDIA.
The orange port (3A) is used to power the Jetson Nano Dev Kit. Utilize the remaining 6 in micro-B USB cable to supply power to the Jetson Nano Dev Kit.
Congratulations! You have fully assembled your SparkFun JetBot AI Kit!
5. Software Setup Guide from NVIDIA
Attention: The SD card in this kit comes pre-flashed to work with our hardware and has the all the modules installed (including the sample machine learning models needed for the collision avoidance and object following examples). The only software procedures needed to get your Jetbot running are steps 2-4 from the Nvidia instructions (i.e. setup the WiFi connection and then connect to the Jetbot using a browser). Please DO NOT format or flash a new image on the SD card; otherwise, you will need to flash our image back onto the card (instructions below).
Your SparkFun Jetbot comes with a Pre-Flashed micro SD card. Users only need to plug in the SD card and set up the WiFi connection to get started.
The default password on everything (i.e. login/user, jupyter notebook, and superuser) is ”jetbot”.
We recommend that users change their passwords after initial setup. These are typically covered on the first boot of your Jetson Nano as detailed in the NVIDIA Getting Started with Jetson Nano walkthrough
Software Setup
The only steps needed to get your Jetbot kit up and running is to log into the Jetbot and setup your WiFi connection. Once that is done, you are now ready to connect to the Jetbot wirelessly. If you need instructions for doing so, you can use the link below.However, please take note of our instructions below. You will want to skip steps 1 and 5 to avoid erasing the image on the card or undoing the hardware configuration.NVIDIA JETBOT WIKI SOFTWARE SETUP
Instructions
Skip step 1 of Nvidia’s instructions: It references how to flash your SD card, so feel free to skip to Step 2 – Boot Jetson Nano.
Note: Following Step 1 will erase the pre-flashed image and make a lot of extra work for yourself.
Skip step 5 of Nvidia’s instructions: This step should already be setup on the pre-flashed SD card.
If in the future, you need to update your notebooks, make sure that if you are following Step 5 – Install latest software (optional), skip the last command line instruction of the forth step.
Get and install the latest JetBot repository from GitHub by entering the following commands
COPY CODEgit clone https://github.com/NVIDIA-AI-IOT/jetbot
cd jetbot
sudo python3 setup.py install
Note:Running sudo python3 setup.py install in the command line will overwrite the software modifications for SparkFun’s hardware in the kit.
Troubleshooting
In the event that you accidentally missed the instructions above, here are instructions to get back on track.
Re-Flashing the SD card
If you need to re-flash your SD card, follow the instructions from Step 1 Nvidia’s guide. However, download and use our image instead (click link below).DOWNLOAD SPARKFUN’S JETBOT IMAGENote: Don’t forget to uncompress (i.e. unzip, extract, or expand) the file from the .zip file/folder first. You should be pointing the ”flashing” software to an ~62GB .img file to flash the image (sparkfun_jetbot_v01-00.img) onto the SD card.
Alternatively, there are other options for flashing images onto an SD card. If you have a preferred method, feel free to use the option you are most comfortable with.
Re-Applying the Software Modifications
If you have accidentally, overwritten the software modifications for the hardware included in your kit, you will need to repeat Step 5 from Nvidia’s guide from the desktop interface (if you are comfortable performing the following steps from the command line, feel free to do so).
Skip steps 1 and 2: Plug in a keyboard, mouse, and monitor. Then log in to the desktop interface (if you haven’t changed your password, the default password is: jetbot).
Follow step 3: Launch the terminal. There is an icon on sidebar on the left hand side. Otherwise, you can use the keyboard short cut (Ctrl + Alt + T).
Follow step 4: However, before you execute sudo python3 setup.py install you will want to copy in our file modifications to the jetbot directory you are in.
Begin by downloading our files (click link below).
Next, replace the files in the jetbot folder. The file paths must be the same, so make sure to overwrite files exactly.
Click on the icon that looks like a filing cabinet on the left hand side of the GUI. This is your Home directory. From here, you will need to proceed into the jetbot folder. There you will find a jetbot folder with similar files to the ones you just extracted. Delete the folder and copy in our files (you can also just overwrite the files as well).
Now, you can execute sudo python3 setup.py install in the terminal.
Follow step 5: Finish up by following step 5. Now you are back on track to getting your Jetbot running again!
6. Examples
The ”object following” jupyter notebook example won’t work due to the required dependencies that had not been released by NVIDIA prior to the creation of the SparkFun JetBot image. These updates can be manually installed on your Jetson Nano with the JetPack 4.2.1 release.
Update: The engine generated for the example utilized a previous version of TensorRT and is therefore, not compatible with the latest release. For more details on this issue, check out the following GitHub issue.NVIDIA JETBOT WIKI EXAMPLES
Resources and Going Further
Now that you’ve successfully got your JetBot AI up and running, it’s time to incorporate it into your own project!
For more information, check out the resources below:
Need some inspiration for your next project? Check out some of these related tutorials:
Easy Driver Hook-up Guide
Get started using the SparkFun Easy Driver for those project that need a little motion.
Servo Trigger Hookup Guide
How to use the SparkFun Servo Trigger to control a vast array of Servo Motors, without any programming!
SparkFun 5V/1A LiPo Charger/Booster Hookup Guide
This tutorial shows you how to hook up and use the SparkFun 5V/1A LiPo Charger/Booster circuit.
Wireless Remote Control with micro:bit
In this tutorial, we will utilize the MakeCode radio blocks to have the one micro:bit transmit a signal to a receiving micro:bit on the same channel. Eventually, we will control a micro:bot wirelessly using parts from the arcade:kit!
Här får du möjlighet att bestämma över Sveriges elproduktion. Utmaningen ligger i att ha tillräckligt med effekt när efterfrågan är som störst och att samtidigt hålla koll på miljökonsekvenserna. Du bygger – du bestämmer!
Simulatorn räknar med att tillfälliga överskott exporteras som vid behov importeras senare.
Varje megawatt (MW) elproduktionskapacitet kan bara användas av ett land åt gången. Riktigt kalla dagar skapar ofta brist också i våra grannländer så varje land behöver tillräckligt med kapacitet för att klara effekttoppar.
Räknar ni med energibesparingar?
Vi räknar med dagens elbehov. I framtiden kan behovet av el både öka och minska.
Effektivare användning av elenergi ger ökad ekonomisk konkurrenskraft vilket leder till ekonomisk tillväxt som i sin tur historiskt sett alltid gett högre efterfrågan på el.
Räknar ni med lagring av el?
Vi har inte räknat med lagring av el i nuvarande versionen av Simulatorn.
Ett energilager skapar energiförluster på motsvarande 25 procent vilket gör att mer energi behöver produceras än om ett energilager inte används.
Räknar ni med smarta elnät?
Nej, men införande av smarta elnät ändrar grundläggande inte på våra beräkningar.
Solenergi har ingen tillgänglig effekt?
Tillgänglig effekt i simulatorn beräknas vid tidpunkten då efterfrågan på el är som störst. I Sverige inträffar detta kalla dagar mellan klockan 7-8 på förmiddagen. Eftersom solen inte har gått upp vid denna tidpunkt på vintern kan solpaneler inte producera någon ström då.
Så har vi räknat
Här kommer en beskrivning av hur vi har räknat ut effekt, energi och energiöverskott.
Effekt
Effekten är ett mått på energiproduktionskapaciteten hos en elproduktionsanläggning. Effekten kan delas upp i tre delar.
Installerad effekt
Medeleffekt
Minsta tillgängliga effekt
Installerad effekt (Watt) är helt enkelt den högsta effekt som produktionsanläggningen kan producera. Medeleffekt beräknas genom att ta energiproduktionen (Wh) för en viss period (exempelvis ett år) och dela med antalet timmar för perioden (ett år är 365×24=8760 timmar).
Minsta tillgängliga effekt är den effekt som sannolikt finns tillgängligt vid tidpunkten för den högsta elförbrukningen. I Sverige inträffar den högsta elförbrukningen ungefär klockan 7 på morgonen under kalla vinterdagar.
För att beräkna tillgängligheten för olika kraftslag används Svenska Kraftnäts årliga balansrapport. Det högsta effektbehovet vid en normalvinter är 26 700 MW men vid en s.k. tioårsvinter kan effektbehovet uppgå till 27 700 MW. Tabellen nedan visar prognosen för installerad effekt vid årsskiftet 2019/20 (Svenska Kraftnät). Notera också att vi räknar bort den delen av gaskraften som ingår i störningsreserven (ca 1360 MW):
Kraftslag
Installerad effekt
Tillgänglig effekt
Tillgänglighetsgrad
Vattenkraft
16 318
13 400
82%
Kärnkraft
7 710
6 939
90%
Solkraft
745
0
0%
Vindkraft
9 648
868
11%
Gasturbiner
219
197
90%
Gasturbiner i störningsreserven
1 358
0
0%
Olje-/kolkondens
913
822
90%
Olje-/kolkondens otillgängligt för marknaden
520
0
0%
Mottryck/kraftvärme
4 622
3 536
77%
Mottryck/kraftvärme otillgängligt för marknaden
450
0
0%
Summa
40 503
25 762
–
Kolkraft och solenergi
I våra beräkningar gör vi bedömningen att kolkraft har motsvarande tillgänglighet som kärnkraft och gasturbiner nämligen 90%. För solenergi har vi valt att noll procent finns tillgängligt när effektbehovet vintertid är som störst. I Malmö går solen upp klockan 08:30 och går ner 15:37 vid midvintersolståndet den 21 december. Högst effektbehov uppstår vintertid före åtta och efter sexton då det alltså i hela Sverige fortfarande är mörkt.
Kolkraft, 90% tillgänglig effekt.
Solenergi, 0% tillgänglig effekt.
Svenska Kraftnät räknar med att det under vintern 2019/2020 finns 745 MW installerad solenergi i Sverige.
Beräkning av reglerkraft
När vi beräknar energi så startar vi först med hypotesen att alla anläggningar med låga produktionskostnader körs så mycket som möjligt. All produktion i icke-styrbara produktionsanläggningar som överstiger årsmedelproduktionen antas gå på export. Vind och sol i det nordiska elsystemet är ofta korrelerat så därför går det inte att importera just dessa kraftslag senare i obegränsad omfattning. Begränsningen till medeleffekten bedöms ändå vara generöst tilltaget.
Elbehov minus produktion utan reglerkraft minus export ger alltså behovet av reglerkraft.
Vattenkraften antas kunna användas fullt ut som reglerkraft även om det i genom vattendomar och andra fysiska begränsningar i praktiken inte är möjligt. När vattenkraften inte räcker till kan gasturbiner eller annan reglerkraft köras under begränsad tid. Reservanläggningar som vissa gasturbiner och oljekondenskraftverk beräknas köras i försumbar omfattning. Kärnkraft och kolkraft, när den finns, beräknas köras så många timmar som möjligt (ca 8 000 timmar per år).
Förenklingar
Simulatorn är tänkt att ge en känsla för begreppen installerad effekt, tillgänglig effekt och relationen till total energiproduktion. Vi tar inte hänsyn till följande saker
Överföringsförluster
Begränsningar i elnätet
Begränsningar i vattenkraftens reglerförmåga
Bara delvis tagit hänsyn till begränsningar för import/export
Dessa avgränsningar har gjorts för att göra simulatorn enkel att använda och ge största möjliga förståelse utan avkall på trovärdigheten i det större perspektivet.
Övriga produktionsslag antas ha lågt eller inget fast avfall.
Koldioxid CO2
Alla produktionsslag ger upphov till koldioxidutsläpp vid byggnation, bränsleutvinning, drift, rivning, etc. Utsläpp beräknas enligt livcykelmodellen. I första hand har vi använt Vattenfalls beräkningar och i andra hand valt andra källor. Koldioxidutsläpp i simulatorn beräknas enligt följande tabell
Källa: SMHI Vattenkraft orörda älvar, Potential totalt (TWh) 35 Nyttjande tid (h) 4000 Fördelat på fyra älvar baserat på flöden ger följande potential per älv.
Älv
Flöde (m3/s)
Procent
Energi (TWh)
Effekt (MW)
Torneälven
388
35%
12.4
5 662
Kalixälven
295
27%
9.4
4 292
Piteälven
167
15%
5.3
2 420
Vindelälven
249
23%
7.9
3 607
Summa
1 099
100%
35
15 981
Mer om elnät
Elnät används för att distribuera el från elproducenter till konsumenter. Kostnaden för elnäten beror i huvudsak på två faktorer, avstånd mellan produktion och konsumtion och hur effektivt elledningarna utnyttjas (kapacitetsfaktor).
Ett elnät med korta avstånd mellan produktion och konsumtion ger ett relativt billigare elnät jämfört med ett elnät med långa avstånd.
Långa avstånd ger också betydande överföringsförluster. En tumregel är att 6-10 procent av elen förloras per 1000 km i en 400 kilovolt högspänningsledning.
Enligt världsbanken är de genomsnittliga förluster för svenska elnätet 7 procent eller ungefär 10 TWh vilket är jämförbart med vindkraftens produktion 2013.
Ett elnät med korta avstånd och hög utnyttjandegrad per ledning är därför avgörande för att hålla kostnaderna och överföringsförlusterna så låga som möjligt.
För en vanlig elkund är elnätskostnaderna inte sällan högre än kostnaden för själva elen (elhandelskostnaden).
Känner du dig ibland trött under möten eller i skolan? Har du ibland huvudvärk efter jobbet eller skolan? Vill du ändra på det? Då kan det vara intressant för dig att mäta skadliga gaser i luften i din arbetsmiljö, vilka kan resultera i både trötthet och huvudvärk.
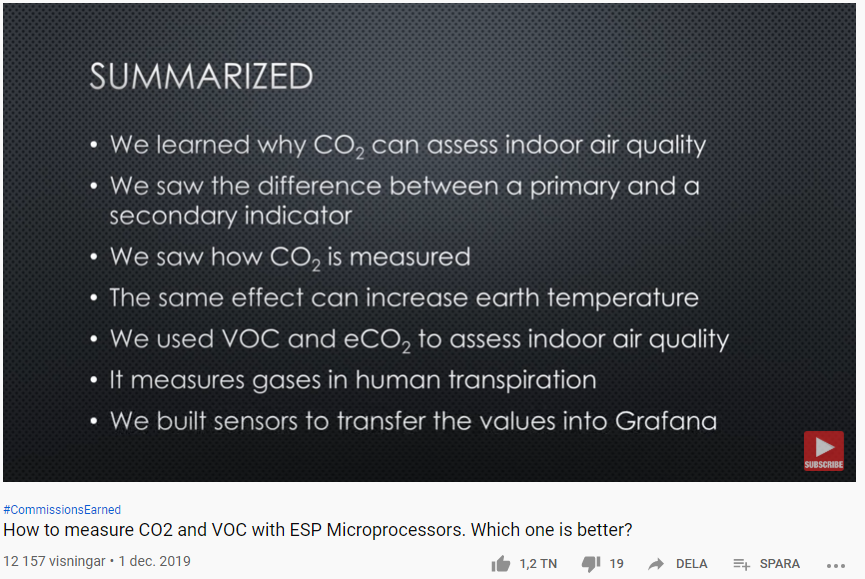
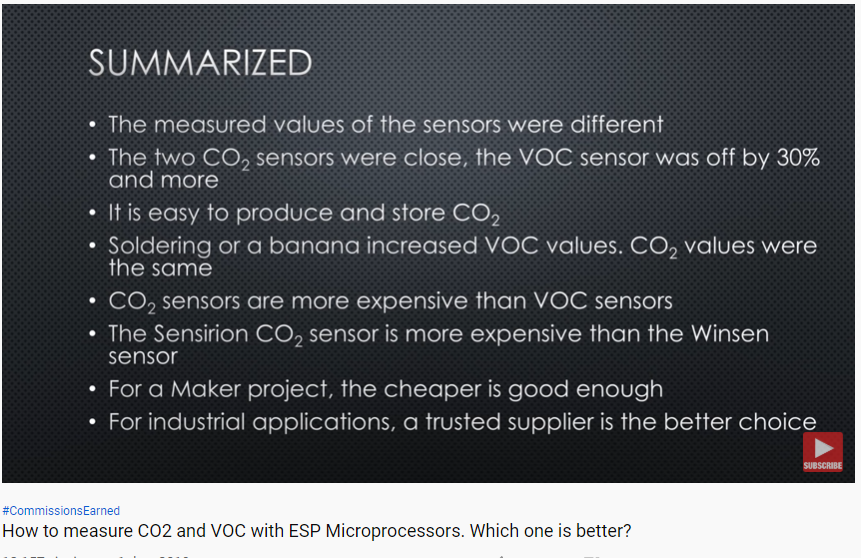
I filmklippet nedan används en ESP32 och två ESP8266 med sensorer för att bygga ett system som mäter luftkvaliteten. Sensorerna som används är: Winsen MH-Z19, Sensirion SGP30 och SCD30. I denna video:
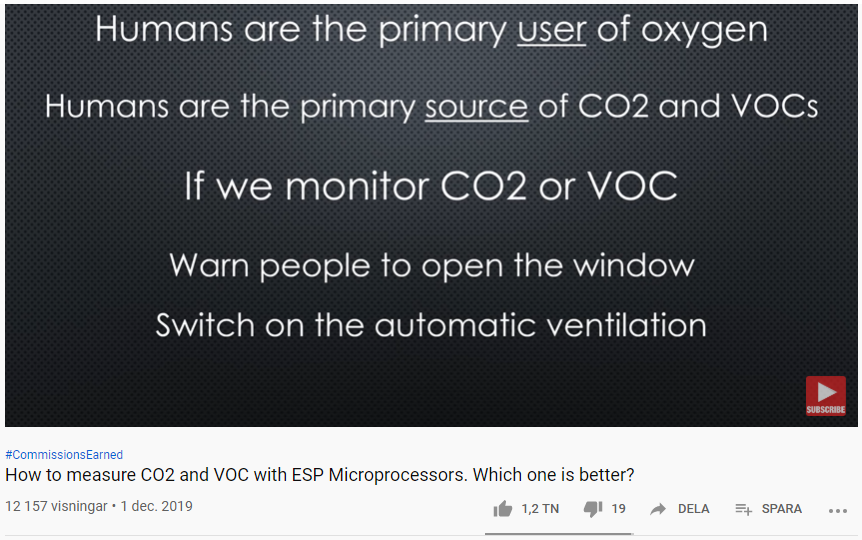
Fokusera på inomhusklimat
Fokusera på gaser där den främsta källan är människor
CO2:s påverkan på luftkvaliteten inomhus
Se förhållandet mellan CO2-sensorer och global uppvärmning
Använd ett annat sätt för att bedöma inomhusluften: VOC eller eCO2
Och vi kommer att bygga sensorer för att överföra värden till Grafana
En ny våg av innovation driver en radikal förändring av mode och textilbranschen. I framtiden kan kläder vara datorer, tillverkade med material designade och odlade i ett labb.
Filmen nedan ger en inblick i det som har kommit att kallas Fashiontech.
Kopiera nedanstående text, klistra in den i din loggbok och läs sedan texten.
Bärbar teknik, data, automatisering och labbodlat material kommer att ha en stor inverkan på vad människor kommer att ha på sig i framtiden.
Sedan sömnaden och vävningen föddes har tekniken alltid lett till utveckling inom mode. Den industriella revolutionen mekaniserade tillverkning som möjliggör massproduktion. På 1960-talet tog syntetiska material som polyester fart och skapade nya möjligheter för mode.
Nu öppnar konvergensen av ny teknik upp tidigare otänkbara möjligheter. Dr Amanda Parkes är modevetenskapsman och chef för innovation vid FT-labs, ett riskkapitalföretag som främst investerar i modetekniska startups. Hon berättar att det bland dessa nystartade företag handlar om att hitta nästa generation förnybara material som kan odlas i ett labb. Traditionell siden produceras av insektslarver som bildar kokonger, oftast silkesmaskar. Men snarare än att lita på dessa insekter, så skapar bulttrådar silke i provrör. Biotillverkade material tar bort behovet av djur och insekter och det är ett mer hållbart och effektivt sätt att producera råmaterial.
Andra företag skapar läderalternativ. I stället för att använda djur skapar forskare biotillverkade material från ananasblad och till och med svamp. Konvergensen mellan mode och teknik ger också möjligheter att förändra inte bara kläder utan de människor som bär dem.
Myant är ett företag som är banbrytande i skapandet av kläder som kan övervaka alla dina rörelser. Så kallade smarta tyger förutspås bli nästa stora genombrott för bärbar teknik. Garn kombineras med elektroniska sensorer så att viktiga data kan fångas från människokroppen. För att skapa kläder som kan övervaka bärarens hälsa och fitness har Myant samlat team av människor som inte traditionellt har arbetat under samma tak. Smarta tyger kan radikalt förändra konsumenternas relationer till kläderna de bär, men när tekniken ökar förändringstakten, hur kan branschen hålla reda på vad konsumenterna verkligen vill ha?
Francesca Muston är chef för detaljhandeln på WGSN, världens ledande modeprognosbyrå. Personalen här använder big data för att analysera politiska, sociala och miljömässiga trender för att förutsäga morgondagens heta mode. Teknik driver en explosion i konsumentens val såväl som det förvirrande utbudet av kläddesign och skapande. För att textil- och modebranschen ska överleva vänder de sig till tekniken. Maskininlärningsteknologier är nu centrala för modeprognoser, vilket snabbt upptäcker mönster bland den ständigt växande datamängden.
Från bioteknik till demografiska förändringar och att förutsäga trender är inte längre en konst, det har blivit en vetenskap.
I konstruktionskursens del av Fashiontech-projektet kommer vi jobba med både Elektronikkonstruktion och Mekanisk konstruktion.
Elektronikkonstruktionsarbetet omfattar följande delar:
Kravspecifikation/kravbeskrivningar
Funktionsspecifikation/funktionsbeskrivning
Blockschema
Flödesschema/flödesmodeller
Kopplingsschema
Kretsschema
Kretskortslayout
Mönsterkort
Anslutningsdon
Ledare och kablage
Kylning
Analog och digital teknik, analoga och digitala komponenter, signaler och kretsar.
Logik och Boole’s algebra
Funktionstabeller/sanningstabeller
Olika talsystem, binära, hexadecimala
ASCII-kod och Unicode
Prototyper, test och simuleringar
Lödning
Strömförsörjning och olika batterityper
Elektronikproduktion, produktionsmetoder och produktionsteknik
Projektdokumentation
Projektkommunikation
Lektionsuppgifter v 43:
Bestäm vilken yrkeskategori du vill designa, konstruera och skapa en riktig prototyp av ett Fashiontech-plagg till. Skriv in vilken yrkeskategori du valt (målgrupp) och skriv vilket klädesplagg (produkt) du vill skapa.
2. Skriv en lista på vilka funktioner du tycker att plagget ska ha. Varje funktion ska lösa någon form av användarbehov. Skriv en funktionsbeskrivning för respektive funktion och vilket behov eller problem den löser. Gör funktionsbeskrivningen hierarkisk. Först en övergripande beskrivning för respektive funktion, sedan en mer detaljerad beskrivning av funktionerna. Vad gör funktionen? Varför ska den finnas? Hur fungerar den? Hur ska funktionen styras?
3. Gör research. Sök efter liknande smarta plagg, wearables eller andra produkter som löser samma problem eller tillgodoser de användarbehov du vill adressera med din Fashiontech-produkt. Samla på dig relevant info som du hittar. Lägg in länkar till dina källor och kopiera text och bilder som du anser kan vara bra att ha. Ta gärna med flera olika varianter av varje konkurrerande befintlig produkt du hittar. Ta reda på hur produkterna fungerar, hur de är uppbyggda, konstruerade, vilka material som används, specifikationer och egenskaper m.m.
4. Skapa en komponent-lista till ditt Fashiontech-plagg. Vilka komponenter tror du kommer behövas för att erhålla önskad funktion? Gör research; sök efter tänkbara komponenter eller moduler som har de funktioner och egenskaper som du tror behövs. Samla på dig info som du hittar. Lägg in länkar till dina källor. Ta med flera olika varianter av varje komponent. Är du osäker på om din produktidé kommer fungera rent konceptuellt så kan du bygga en prototyp och testa funktionen. Vilka delar/komponenter eller moduler kan du använda för att bygga en fungerande konceptprototyp?
5. Arbeta med designen av ditt Fashiontech-plagg. Samla på dig inspirationsbilder och förlagor som du hittar på Internet. Kopiera in dem i din Design-loggbok. Du kan även börja skissa på hur du vill att ditt Fashiontech-plagg ska se ut (uppgift i kursen Bild och form).
6. Skapa en beskrivande och säljande presentation av ditt Fashiontech-plagg-projekt. I detta läge handlar det inte om att göra reklam för en färdig produkt, utan en presentation av din projektidé. Berätta vad du planerar att göra, lära dig och beskriv funktionerna som det smarta plagget ska ha och vilka problem hos kunderna du försöker lösa. Denna presentation ska vi lägga upp på www.fashiontech-projects.se efter höstlovet.
Uppdrag: Ta fram design-idéer till funktionella smarta arbetskläder för olika yrkeskategorier Syfte: Förbättra klädbärarens arbetsdag genom att förbättra klädernas funktion mha t ex sensorer och annan elektronik.
Brainstorming-övning (enskilt) Kom på så många funktioner och exempel som möjligt på smarta kläder för de olika yrkeskategorierna och produktkategorierna nedan. Beskriv vad funktionen ska kunna göra, varför det kan vara bra och vilken typ av komponent som behövs i klädesplagget för att erhålla önskad funktion.
Brandman (exempel: temperatursensor …)
Polis
Byggarbetare
Arbetskläder, skyddsutrustning, knäskydd
Skyddsskor
Skyddshjälmar
Handskar
Vägarbetare
Butikspersonal
Kassörska
Trädgårdsmästare/Parkarbetare (ex färgsensor i handske)
Lastbilschaufför
Förskollärare, hålla koll på barnen (ex: fuktsensor i blöja)
Skolpersonal, lärare (ex se Vinnova-projekt IoT-Hubb skola)
(Reuters) – Apple Watch kunde upptäcka oregelbundna hjärtpulsfrekvenser som kan signalera behovet av ytterligare övervakning för att upptäcka ett allvarligt hjärtrytmproblem, enligt data från en stor studie finansierad av Apple Inc, som visar en potentiell framtida roll för bärbar konsumentelektronik (s k wearables) inom vården.
Forskare hoppas att tekniken kan hjälpa till vid tidig upptäckt av förmaksflimmer eller hjärtflimmer (eng. Atrial Fibrillation, AF), den vanligaste formen av oregelbundna hjärtslag. Patienter med obehandlad förmaksflimmer har fem gånger större sannolikhet att drabbas av stroke.
Resultat från den största förmaksflimmer-undersöknings- och detekteringstudien med över 400 000 Apple Watch-användare som var inbjudna att delta, presenterades på lördagen den 16 mars 2019 vid American College of Cardiology-mötet i New Orleans.
Av de 400 000 deltagarna fick 0,5 procent, cirka 2000 personer, meddelanden om en oregelbunden puls via appen i deras smarta klockor. Dessa personer fick sedan bära en mobil EKG-apparat (elektrokardiografi) för efterföljande detektion av förmaksflimmerepisoder.
En tredjedel av dem vars klockor upptäckte en oregelbunden puls bekräftades ha förmaksflimmer med hjälp av EKG-tekniken, sa forskarna.
84 procent av de oregelbundna hjärtpulsmeddelandena bekräftades senare ha varit hjärtflimmer-episoder, visade data.
”Läkaren kan använda informationen från studien, kombinera den med sin bedömning … och sedan styra kliniska beslut om vad man ska göra med en varning”, säger Dr. Marco Perez, en av studiens ledande utredare från Stanford School of Medicine.
Studien fann också att 57 procent av deltagarna som fick en alert på sin smarta klocka sökte läkarvård.
För företag som Apple ger den här typen av data en kraft i en ny riktning in i sjukvårdsbranschen. Apples nya smarta klocka, Apple Watch Series 4, som blev tillgänglig först efter studien började, och som alltså inte användes i den här studien, har förmågan att ta ett EKG (elektrokardiogram) för att upptäcka hjärtproblem. Den produkten krävde ett godkännande från US Food and Drug Administration (FDA).
Dr. Deepak Bhatt, en kardiolog (typ av hjärtspecialist) från Brigham and Women’s Hospital i Boston som inte var inblandad i försöken, kallade den en viktig studie, eftersom användningen av denna typ av bärbar teknik bara kommer att bli mer utbredd. ”Studien är ett viktigt första steg för att ta reda på hur kan vi använda dessa teknologier på ett sätt som bygger på bevis,” han sa.
Under de första lite drygt 2 minuterna i denna filmade intervju diskuterar Drs. Deepak Bhatt och Peter Block ”AFib detection using the Apple Watch” och beskriver det som en disruptiv teknologi som kan förändra sjukvården (Apple Heart – 00:30-02:30);
Forskare uppmanar till försiktighet av läkare att använda data från konsumentprodukter vid behandling av patienter. Men de ser också stor framtidspotential för denna typ av teknik.
”Förmaksflimmer är bara början, eftersom denna studie öppnar dörren för att ytterligare undersöka bärbar teknik och hur de kan användas för att förebygga sjukdom innan den slår ut,” säger Lloyd Minor, dekan för Stanford School of Medicine.
Uppgiftskod: AWUOHISAS-TKSVBISH
Diskussionsfrågor:
Syftet med följande diskussionsfrågor är att låta eleverna arbeta språkutvecklande med artikeln där de tränar, utvecklar och visar sina kunskaper och förmågor inom läsförståelse, att ta del av fakta, uttrycka sig i tal och skrift, argumentera, resonera, beskriva, förklara och tolka olika typer av texter. De kan även källkritiskt granska fakta och påståenden, hänvisa till olika källor, reflektera och ta ställning till egna personliga val gällande användningen av tekniska hjälpmedel för att främja vård och hälsa. Lämpliga arbetsmetoder kan vara t ex EPA (Enskilt – Par – Alla), jobba i basgrupper eller individuellt.
(TkBiSv) Vad handlar artikeln om? Sammanfatta det viktigaste.
(TkBiSv) Vad är nyheten i artikeln?
(TkBiSv) Är det en positiv, negativ eller neutral nyhet? Finns det flera perspektiv?
(TkBiSv) Vem ligger bakom artikeln? Vem har skrivit den, vem är avsändaren, vem står som garant för faktan?
(TkBiSv) Är artikeln trovärdig? Finns det några tveksamheter i artikeln? Motivera ditt svar med sakliga argument.
(Sv) I vilken mån anser du att det är en argumenterande, beskrivande, förklarande, debatterande, påverkande, informerande eller problematiserande artikel?
(TkBiId) Ge exempel på fler liknande produkter som kan användas för att mäta puls och hjärtrytm.
(TkBiIdShSv) Vilka fördelar kan det finnas med att använda den här typen av teknik, som privatkonsument och inom vården?
(TkBiIdShSv) Vilka eventuella nackdelar och risker kan det finnas med att använda den här typen av teknik, som privatkonsument och inom vården?
(Tk) Har du själv, eller någon du känner, erfarenhet från att använda den här typen av teknologi?
(Tk) Känner du någon person som skulle ha behov av att använda den här typen av teknologi?
(TkBi) Skulle du själv kunna tänka dig att använda den här typen av teknologi för att få reda på om du har eller är på väg att få hjärtproblem?
(TkBiShSyv) Vad behöver man kunna för att utveckla en sådan här produkt?
(TkBiId) Vad behöver man kunna som konsument för att ha användning och nytta av en sådan här produkt?
(TkBiSyv) Vad behöver vårdpersonalen kunna för att ha användning för en sådan här produkt inom sjukvården?
(TkBiIdShSyv) Hur tror du att den här typen av produkter och teknologier kommer förändra vår hälsa, våra beteenden och framtidens sjukvård?
(BiSvIdTk) Vad är puls? Var på kroppen kan man mäta puls och hur? Vad är hjärtrytm och vad innebär förmaksflimmer? Vad är stroke?
(Ma) Hur många procents större risk har personer med obehandlad förmaksflimmer att drabbas av stroke?
(MaSv) Hur många personer i undersökningen bekräftades ha förmaksflimmer med hjälp av EKG-tekniken?
(Ma) Skapa visuella illustrationer till statistiken som presenteras i texten. T ex cirkeldiagram eller stapeldiagram.
(BlTk) Skapa en annons eller ett reklamblad för en helt ny, tidigare okänd produkt, med den här teknologin och funktionen.
(SvBiTk) Skriv en kritiskt argumenterande text som tar avstånd från att använda Apple Watch specifikt, eller den här typen av produkter och teknologier generellt för att detektera och förutspå sjukdomar och kartlägga vår hälsa.
(BiSyv) Om du är intresserad av att veta mer om vad EKG är och hur man tolkar EKG kan du t ex läsa första kapitlet i kursen ”Introduktion till hjärtfysiologi och elektrokardiologi”. Webbsidan ekg.nu är en komplett e-bok och webbutbildning i klinisk EKG-diagnostik som vänder sig till läkare, sjuksköterskor, ambulanspersonal, studenter och forskare som vill lära sig EKG-tolkning. Sidan används på samtliga medicinska universitet och universitetssjukhus, så funderar du på att studera till ett vårdyrke så kan du få en inblick i vad du kommer att få lära dig.
Kopplingar till LGR 11: Årskurs: 7-9 Ämne: Tk teknik, Sv svenska, Sh samhällskunskap, Bi biologi, En Engelska, Ma matematik, Id Idrott och Hälsa, Bl Bild, Syv Studie och Yrkes-vägledning. Syftestext: Centralt Innehåll: Kunskapskrav: