Instruktioner för hur man kan skapa ett automatiskt bevattningssystem med Micro:bit, en servomotor och ett sugrör.
Det här en uppgift som lämpar sig väl för högstadieelever i åk 7-9 i Teknik eller gymnasieelever på Teknikprogrammet. Även yngre elever i åk 4-6 kan klara av det med hjälp av tydliga instruktioner och handledning av lärare.

Klicka här för ett annat alternativ som använder en vattenpump istället –>.
Exempel på det här projektets kopplingar till centralt innehåll i kursplanen för Teknik 7-9:
Teknik, människa, samhälle och miljö
- Internet och några andra globala tekniska system samt deras fördelar, risker och begränsningar.
- Möjligheter, risker och säkerhet vid teknikanvändning i samhället, däribland vid lagring av data.
- Konsekvenser av teknikval utifrån ekologiska, ekonomiska och sociala aspekter av hållbar utveckling.
Tekniska lösningar
- Hur komponenter och delsystem benämns och samverkar inom tekniska system, till exempel informations- och kommunikationsteknik och transportsystem.
- Tekniska lösningar för styrning och reglering med hjälp av elektronik och olika typer av sensorer. Hur tekniska lösningar som utnyttjar elektronik kan programmeras. Begrepp som används i samband med detta.
Arbetsmetoder för utveckling av tekniska lösningar
- Teknikutvecklingsarbetets olika faser: identifiering av behov, undersökning, förslag till lösningar, konstruktion och utprövning. Hur faserna i arbetsprocessen samverkar i det egna arbetet och i teknikutvecklingsarbeten i samhället.
- Hur digitala verktyg kan användas i teknikutvecklingsarbete, till exempel för att göra ritningar och simuleringar.
- Egna konstruktioner där man använder styrning eller reglering med hjälp av programmering.
- Dokumentation av tekniska lösningar: skisser, ritningar, fysiska och digitala modeller samt rapporter som beskriver teknikutvecklings- och konstruktionsarbeten.
Bygg en egen jordfuktighetssensor
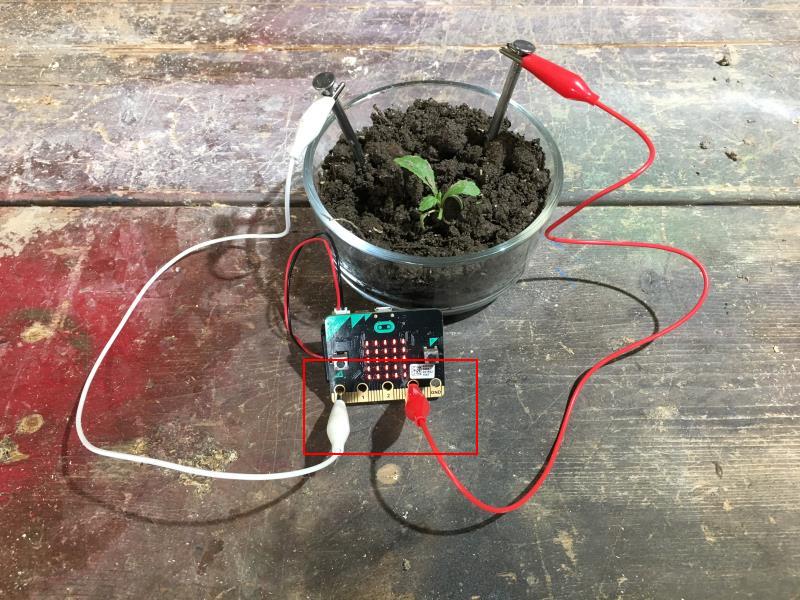
Följ instruktionerna för att konstruera en egen jordfuktsensor.
Koppla en sladd till ena spiken från Micro:bit pin 0.
Koppla en sladd till den andra spiken från Micro:bit pin 3V (3 volt).
Stoppa ner spikarna i jorden.
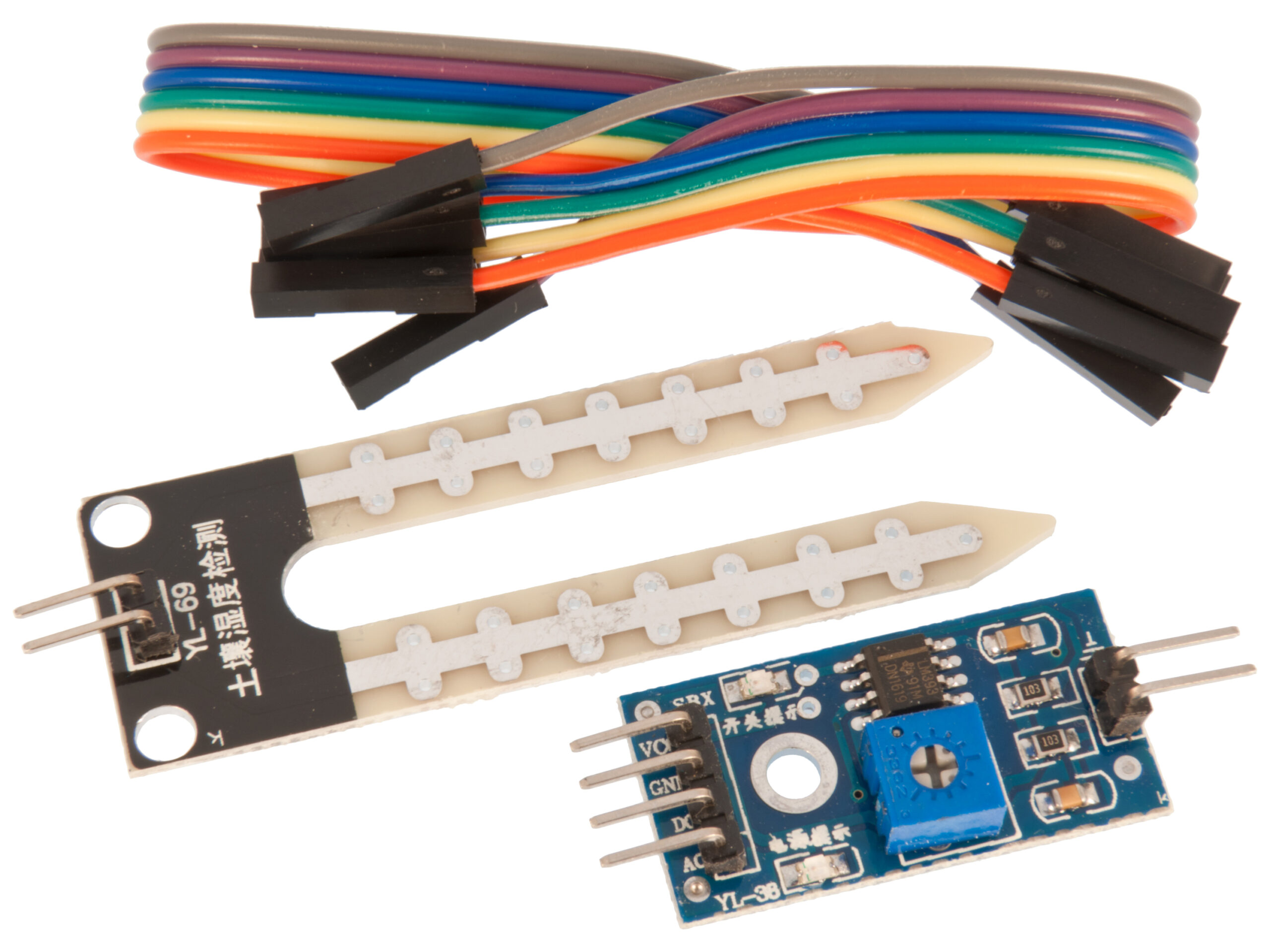
OBS! En enkel resistiv jordfuktighetssensor i form av spikar brukar inte ge så noggrant resultat. Oftast blir det betydligt bättre med en riktig justerbar jordfuktighetssensor som denna –>.
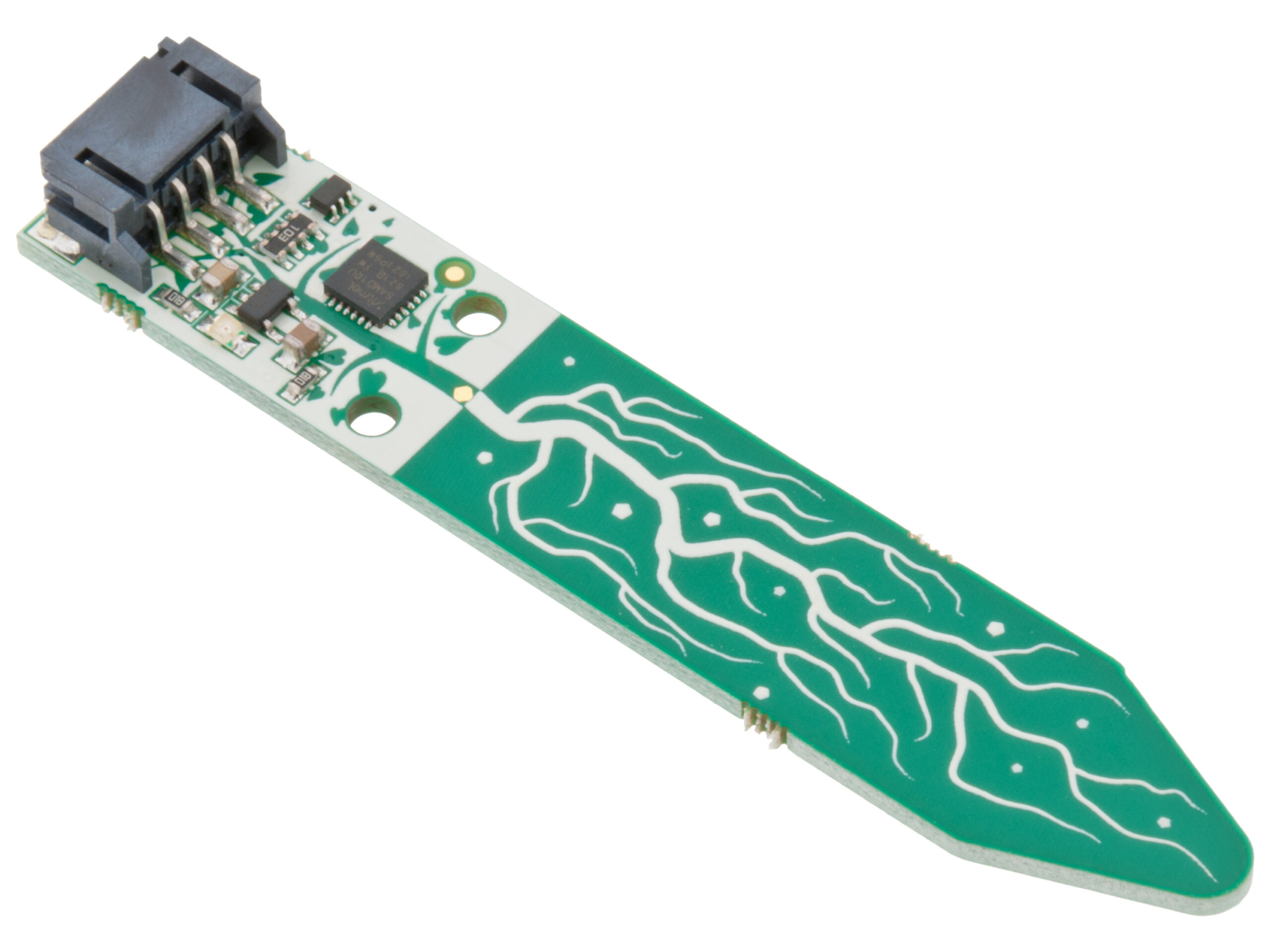
En ännu bättre teknisk lösning är en kapacitiv jordfuktighetssensor som denna –>.
Skapa programkoden till micro:bit
Börja med att programmera din fuktmätare med både torr och fuktig jord. Du behöver göra det för att kunna kalibrera micro:bit så att den vet vilka mätvärden som ska anses vara fuktig respektive torr jord.
Läs och följ instruktionerna nedan. Om du vill ha mer hjälp och guidning för att skapa koden kan du öppna denna sida –>
Steg 1: Mät fukten/fukthalten
Jorden har en elektrisk resistans (elektriskt motstånd) som beror på hur mycket vatten och näringsämnen det finns i jorden. Rent vatten leder inte ström, men om det är t ex salt eller vissa andra ämnen i vattnet så blir det konduktivt, dvs elektriskt ledande. Planteringsjord som är fuktig leder ström och fungerar ungefär som en variabel resistor i en elektronisk krets när vi kopplar in våra fuktmätarelektroder. Ju mer vatten jorden innehåller desto lägre blir resistansen i jorden, och desto mer ström passerar mellan elektroderna genom den fuktiga jorden.
För att kontrollera jordens elektriska ledningsförmåga så kan vi läsa av spänningen på pin P0 på micro:bit genom att definiera den som en analog read pin (analog input). Den uppmätta spänningen (0-3 Volt) kommer ge ett värde mellan 0 och 1023. Värdet 0 innebär att ingen ström flyter genom den torra jorden (I = 0 A) pga dess höga resistans (högt elektriskt motstånd). Därför kan inte heller någon spänning uppmätas på pin P0 (U = 0 V).
Vid ett uppmätt värde av 1023 flyter det maximalt med ström genom den fuktiga jorden eftersom dess resistans är låg, och den uppmätta spänningen på pin P0 = 3 V.
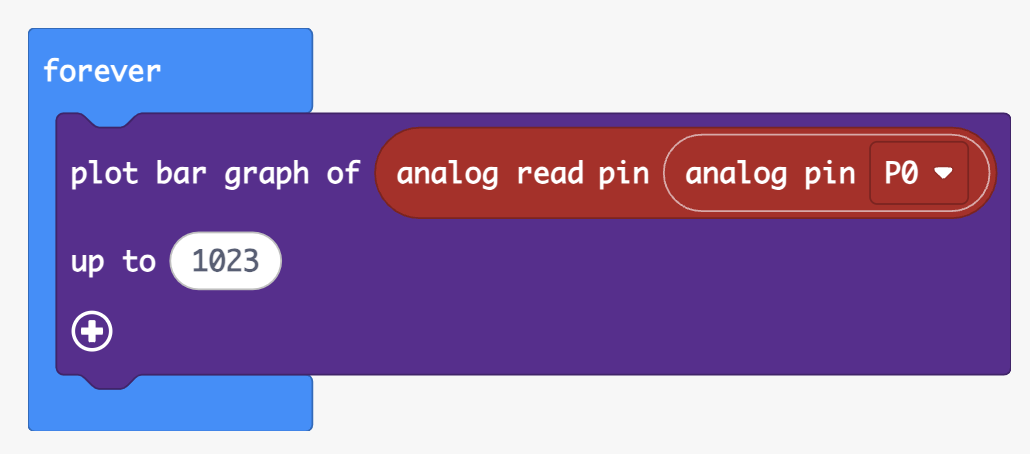
Vi kan lagra det uppmätta värdet på pin P0 i en variabel och sedan läsa värdet från variabeln och visa det som siffror på micro:bits display.
Vi även visa det avlästa värdet direkt som en graf på displayen.
Experiment!
- Insert the nails in the dry dirt and you should see most LEDs turn off.
- Insert the nail in the wet dirt and you should see most LEDs turn on.
Step 2: Sensor data values
In the previous program, we only have a rough idea of what the sensor value is. It’s using just a tiny screen to display it! Let’s add code that displays the current reading when button A is pressed.
This code needs to go into the forever loop. We’ve also added the variable reading to store the reading value.analogt läspinP0reading1023omdåknappAtrycksreadingvisasiffraplot bar graph ofup tosättreadingtillför alltid
Experiment!
- Insert the nails in the dry dirt, press A and note the value. You should see a value close to around
250for dry dirt. - Insert the nails in the wet dirt, press A and note the value. You should see a value somewhere near
1000for wet dirt.
Step 3: Don’t waste energy!

We want our soil probes to work for a long time and to save our battery power, so we need to tweak our code so our moisture sensor doesn’t use too much energy.
- Our circuit connects directly to the 3V pin so it is always using electricity. Instead, we will connect it to P1 and turn that pin high only while the measurement is taken. This saves electricity and also avoids corrosion of the probes.
- We will also lower the brightness of the screen to lower the energy consumption from the LEDs.
- Soil moisture changes very slowly so we don’t need to measure it all the time!!! Let’s add a sleep of 5 seconds in the loop as well.
1023analogt läspinP00reading1023omdåknappAtrycksreadingvisasiffra5000pausa (ms)plot bar graph ofup toanalogt skrivpinP1tillsättreadingtillanalogt skrivpinP1tillför alltid64ställ in ljusstyrkavid start
Experiment!
- Using the dry soil and wet soil pots, test that your circuit still works. Remember you’ll have to wait up to 10 seconds to see a change!
Det kompletta bevattningssystemet ser ut så här:
Extra uppgifter:
Skapa ett kopplingsschema på det automatiska bevattningssystemets ingående komponenter i TinkerCad Circuits. 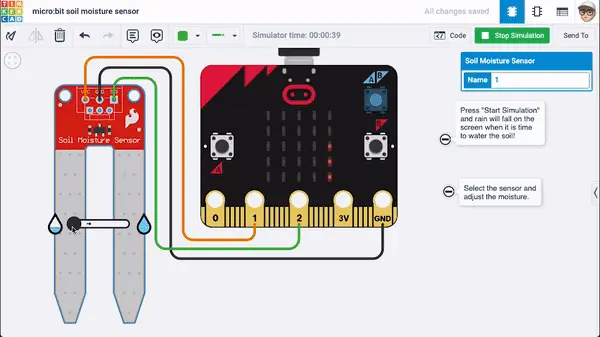
Konstruera en egen variant av skopa eller annan servostyrd mekanism för att fånga upp vatten från glaset och hälla ner det i blomkrukans jord. Gör gärna en 3D Cad-modell i TinkerCad och 3D-printa den, om ni har en 3D-skrivare på skolan.
Exempel på diskussionsfrågor:
- På vilket sätt kan ett automatiskt bevattningssystem påverka arbetsuppgifterna för lantbrukare? Ange fördelar och eventuella nackdelar.
- På vilket sätt kan ett automatiskt bevattningssystem påverka den ekonomiska hållbarheten för ett lantbruk?
- På vilket sätt kan ett automatiskt bevattningssystem påverka den ekologiska hållbarheten för ett lantbruk? Vilka fördelar kan tekniken ge miljö- och klimatmässigt?
- Vilka fördelar, möjligheter och risker kan du se med ett automatiskt Internetuppkopplat bevattningssystem för ett lantbruk?
- På vilket sätt skulle användandet av AI (Artificiell Intelligens) kunna förbättra styrningen av det automatiska bevattningssystemet, jämfört mot hur det är programmerat i det här exemplet?