Plast har blivit ett allt vanligare material sedan det dök upp på marknaden för drygt 60 år sedan. Plaster kan delas in i ca 45 olika plastfamiljer och inom varje familj finns det hundratals varianter där små molekylära ändringar ger de olika plasterna varierande materialegenskaper. Det finns flera typer av plast som är vanliga i vardagsprodukter vi har omkring oss. Här berättar vi om de vanligaste platstyperna och hur de brukar användas.
PVC polymer molecules in a chain. theasis / Getty Images
Härdplast och termoplast
Det två huvudgrupperna bland de många olika plastmaterialen är härdplast och termoplast. Härdplastär plast som inte kan smältas ned eller formas om efter att den har tillverkats. Ofta använder man härdplast tillsammans med glas- eller kolfiber för större konstruktioner, såsom båtar eller segelflygplan.
Termoplast kan, till skillnad från härdplast, både smältas ned och formas om efter tillverkning. Termoplast är vanligare och några exempel på produkter av termoplast är plastpåsar, plastflaskor, glasögonbågar och mobilskal.
Polyeten (PE)
Polyeten är den vanligaste termoplasten och används framför allt i produkter som köksredskap, leksaker, rör, kablar, plastpåsar, plastfolie och flaskor. Polyeten används ofta för att det är billigt att tillverka. Polyeten är elastiskt och absorberar inte vatten samt har goda mekaniska egenskaper samt tål kontakt med många olika ämnen.
Polyeten kan ibland innehålla färgämnen och i vissa fall flamskyddsmedel vid användningar med risk för brand i till exempel kabelisolering.
Polypropen (PP)
Polypropen är en termoplast som används i produkter som matbehållare, förpackningar, leksaker, möbler och textilier. Kännetecknande för polypropen är att det är slitstarkt, genomskinligt samt tål kemiska påfrestningar, till exempel att sura livsmedel ligger länge i en förpackning.
Polypropen kan ibland innehålla färgämnen, antioxidanter och i vissa fall flamskyddsmedel vid användningar med risk för brand.
Polystyren är en vanlig och billig termoplast som förekommer i många olika typer av plastprodukter. Vanliga exempel är livsmedelsförpackningar, plastbestick, lådor för CD-skivor och värmeisoleringsmaterial. Polystyren har bra elektriska egenskaper samt är hårt och styvt.
Expanderad polystyren (XPS) används till exempel till värmeisolering.
Materialet polystyren kan innehålla mjukgörare som ftalater och organiska fosfater eller fosfatestrar. Även antioxidationsmedel, stabilisatorer och bromerade flamskyddsmedel.
Akrylnitril-Butadien-Styren (ABS)
Akrylnitril-Butadien-Styren (ABS) är en termoplast som används främst i elektroniska och tekniska produkter. Exempel är dataskärmar, tangentbord och skrivare. Typiskt för ABS är den är enkel att producera, forma samt går att variera så att den får flera olika egenskaper, till exempel att den ska vara slagtålig.
Materialet ABS kan innehålla mjukgörare som till exempel ftalater. Det kan också innehålla bromerade flamskyddsmedel, färgämnen och antioxidanter.
Polyetentereftalat (PET)
Polyetentereftalat (PET) är en av de absolut mest använda plasterna och förekommer i produkter som burkar och plastflaskor. Kännetecknande för PET är att det nästan inte väger någonting och att det är slagtåligt. PET används också i textilier och förpackningar.
Material av PET kan innehålla färgämnen.
Polymetylmetakrylat (PMMA)
Polymetylmetakrylat (PMMA), även kallat plexiglas, används ofta i till exempel baklyktor på bilar, kontaktlinser samt material som måste tåla hög påfrestning såsom akvarierutor och hockeyrinkar. PMMA är slagtåligt, splittersäkert, vädertåligt och är väldigt likt glas.
Material av PMMA kan innehålla färgämnen.
Polyamid (PA)
Polyamid (PA) förekommer mycket inom textilbranschen och är mest känt som det huvudsakliga materialet i nylonstrumpbyxor. Det används dock också i produkter som skruvar och kugghjul, köksmaskiner, fisknät och fiskelinor, bränsletankar och i elektronisk utrustning. Polyamid är färglöst men är enkelt att färga, väger inte så mycket och är tåligt.
Material av polyamid kan innehålla färgämnen.
Polyvinylklorid (PVC)
Polyvinylklorid (PVC) är den tredje mest använda plasten i världen efter polypropen och polyeten. PVC är i grunden en så kallad styv plast, alltså att den är hård.
Styv PVC används mycket i vatten- och avloppsrör och hårda platsleksaker. Mjukgjord PVC, alltså när man tillsatt mjukgörare i plasten, används till exempel i slangar, golv, höljen till elektriska kablar, tryck på kläder, i regnkläder, skor, väskor och bälten samt i mjuka plastleksaker och i sjukvårdsmaterial som stomi- och blodpåsar. PVC är också den plast som användes i samt gav namnet till vinylskivor.
Merparten av de mjukgörare som används i plastmaterial går till tillverkningen av mjuk PVC.
Material av PVC kan innehålla färgämnen, mjukgörare, stabilisatorer och ibland flamskyddsmedel.
Polykarbonat (PC)
Polykarbonat används i produkter som till exempel CD-skivor, glasögon och trafiklampor. Polykarbonat används också till skottsäkra fönster samt till visir, maskinskydd och flygplansfönster. Typiskt för polykarbonat är att det är genomskinligt, är slag- och värmetåligt samt är elektriskt isolerande.
Polykarbonat kan innehålla tillsatser som mjukgörare, bromerade flamskyddsmedel, färgämnen och antioxidanter.
Gummimaterial
Plastmaterial inkluderar även gummimaterial. Gummi består liksom plast av en eller flera polymerer och en rad olika tillsatsämnen och kännetecknas av sina elastiska egenskaper. Polymeren kan antingen vara naturlig eller syntetisk. Beroende på val av polymer och tillsatsämnen får gummimaterialen olika egenskaper, från mjuka till hårda och styva material. Exempel på tillsatsämnen i gummimaterial är, antioxidanter, UV-strålningsskydd, fyllmedel, mjukgörare och stabilisatorer. Den största enskilda produkten där gummi används är gummidäck.
Icke-förstärkt epoxi kan användas i fogmassa och ytbeläggningar, speciellt på stål och betong. Fiberförstärkt epoxi används för delar i bilar, båtar och flygplan, bränsletankar, golv och komponenter i elektronik.
Epoxi är en värmehärdande plast som har hög resistens mot lösningsmedel och basiska ämnen samt har bra motstånd mot slitage. Epoxi har också goda elektriska och mekaniska egenskaper.
Material av epoxi kan innehålla färgämnen och flamskyddsmedel. Bisfenol A används vid tillverkningen av epoxi och därför kan material av epoxi innehålla bisfenol A som en rest.
Polyuretan (PUR)
I de flesta fall används polyuretan (PUR) som skum i isolering för fjärrvärmerör, kylskåp och frysar samt till möbler, madrasser, golv och skor. Styvt skum av PUR används bland annat till fordonsdelar för till exempel stötfångare.
PTFE har fysikaliska egenskaper som gör den mycket hal (låg friktion). Materialet är känt från varumärken som till exempel Teflon och Gore-Tex.
PTFE är kemikaliebeständigt och kan användas inom ett brett temperaturområde. Det har bra elektriska egenskaper och har en vaxliknande yta som praktiskt taget inget häftar på. Det absorberar inte vatten och bryts inte ner av UV-ljus, ozon eller syre till skillnad från andra termoplaster.
PTFE används i till exempel i stekpannor för att hindra maten från att bränna fast. PTFE används även som slitlager i olika former av glidlager och liknande där man vill ha en låg friktion. Medicinskt används PTFE till exempel i implantat. De goda kemiska egenskaperna gör att ett implantat har lång livstid. Inom optiken kan PTFE-plast användas i vissa typer av linser, eftersom det är transparent för infrarött ljus.
Återvinningssymboler, till exempel en triangel med siffra inuti, anger huvudplasten i produkten. Denna typ av symboler har sitt ursprung i EUs förpackningsdirektiv och om förpackningsavfall och är frivillig och är inte en del av livsmedelslagstiftningen eller har med Livsmedelsverkets ansvar att göra. Dessa symboler har heller inget med säkerhet hos materialet att göra.
Bygg fågelholkar i träslöjden, och använd dem i undervisningen i fler ämnen!
Fågelholkar i träslöjden
Förutom att det är en bra slöjduppgift så kan man göra något spännande och intressant biologi- och teknikprojekt av det också. Eleverna kan sätta upp fågelholkarna runt skolan och förse dem med olika sensorer och kamera för att övervaka, logga och undersöka om och när det flyttar in fåglar i dem, samt lite annan information som temperatur, luftfuktighet och lufttryck. Man kan t ex använda sig av Micro:bit eller Raspberry Pi med lämpliga sensorer till (t ex envirobit från Pimoroni eller Enviro till Raspberry Pi). Det data som loggas kan även användas i matematikundervisningen för att sammanställa till tabeller, olika typer av diagram och grafer och för att beräkna medelvärden m.m.
Här är en lista på fåglar som häckar i holkar och kan tänkas bygga bo i en observationsholk:
Vanligast: Talgoxe Behöver hål med minst 32 mm diameter. På vintern används holkarna som vindskydd när talgoxarna ska sova.
Nötväcka Behöver ca 30 mm diameter men använder helst holkar med 50 mm hål som den då murar igen till lagom storlek. Bottenytans kant bör vara 15 cm.
Göktyta Behöver 32 mm diameter. Ganska sällsynt. Vill ha mycket djup holk (40 cm mellan hål och botten).
Talltita Behöver 30 mm diameter. Bara i eller nära barrskog. Svår att få att häcka i holk. Den vill hacka ut bohålet själv. Fyll holken med sågspån upp till ingångshålet så kan fåglarna tömma den och sedan bygga sitt bo.
Svartmes Behöver 28 mm diameter. Bara i eller nära barrskog. Vill ha en holk nära marken, helst i knähöjd.
Tofsmes Behöver 28 mm diameter. Bara i eller nära barrskog.
Lappmes Behöver 30 mm diameter. Bara i eller nära barrskog med inslag av björk och endast i nordligaste Sverige.
Tornsvala (tornseglare) Behöver 45 mm diameter. Ganska svår att få att häcka i holk. Häckar i vanliga holkar mest i norra Sverige. Helst ska holken i så fall sättas upp liggande, men specialholkar kan också användas. Viktigast är att holkarna placeras högt så att fåglarna kan låta sig falla en bit för att få luft under vingarna vid utflygningen. Det får inte heller finnas trädgrenar eller andra hinder framför ingångshålen.
Trädkrypare Bara i eller nära skog. Behöver speciell holk av tjärpapp eller trä med smalt springformat ingångshål på sidan. Springan skall vara 25—30 mm bred och 50—100 mm lång.
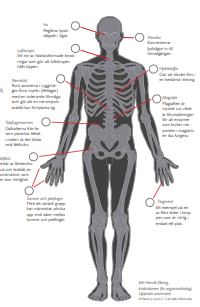
Tänk vad människokroppen är fantastisk! Den är uppbyggd av massor av celler som tillsammans bildar vävnader som i sin tur bygger upp kroppens organ, smart konstruerade för att fungera optimalt på rätt ställe. I vår vardagsmiljö finns föremål och produkter konstruerade med liknande tekniska lösningar som finns i kroppen.
Kan du lista ut var i människokroppen följande tekniska lösningar återfinns? Para ihop rätt siffra med rätt del i kroppen i arbetsbladet i länken nedan. Skriv in siffrorna och dina svar i din loggbok för teknik.
The thrill of taking a corner, extremely low to the ground, with your gut telling you these g-forces are not normal… that’s why we spend countless hours building these silly Power Wheels vehicles. The giggles and grins are unavoidable! These cars are so much fun to drive — and even more fun to race!
In 2016, SparkFun had its eighth annual Autonomous Vehicle Competition. This year saw the introduction of a new rule: you needed to carry a human (or a 20lb dead weight in the form of a watermelon if you were too chicken). To do this, my wife, Alicia, and I modified a Batmobile Power Wheels and combined it with a Razor chassis. The result was an extremely zippy electric go-kart that left a perma-grin on everyone who drove it.
Our goal was to create a vehicle that could quickly and easily switch between human driver and driverless modes so that we could compete in both PRS and A+PRS categories. In the end, Alicia placed a very respectable third place in the driver category, and I did not finish (DNF) in the autonomous category, running into numerous hay bales.
This tutorial attempts to document a six-month build process for an Autonomous + Power Racing Series (A+PRS) vehicle. Every autonomous vehicle is unique, and the requirements of each will vary from build to build.
The AVC rules stipulate that you cannot spend more than $500 on your total budget and that you have to stay within certain size restrictions. We started trolling craigslist to see what was out there and immediately found a plethora of free or cheap “broken” Power Wheels. When a Batmobile for $25 popped up, we quickly snagged it.
Dusty with dog hair and dead spiders — it’s perfect!
The primary failure of all used Power Wheels is a dead battery. The Batmobile was no different; as soon as we put in a new 12V SLA (Sealed Lead Acid), it happily, albeit slowly, drove around. There is nothing magical about “Power Wheels” branded batteries; get the right voltage (usually 12V, sometimes 6V), and you can use almost any battery you’d like.
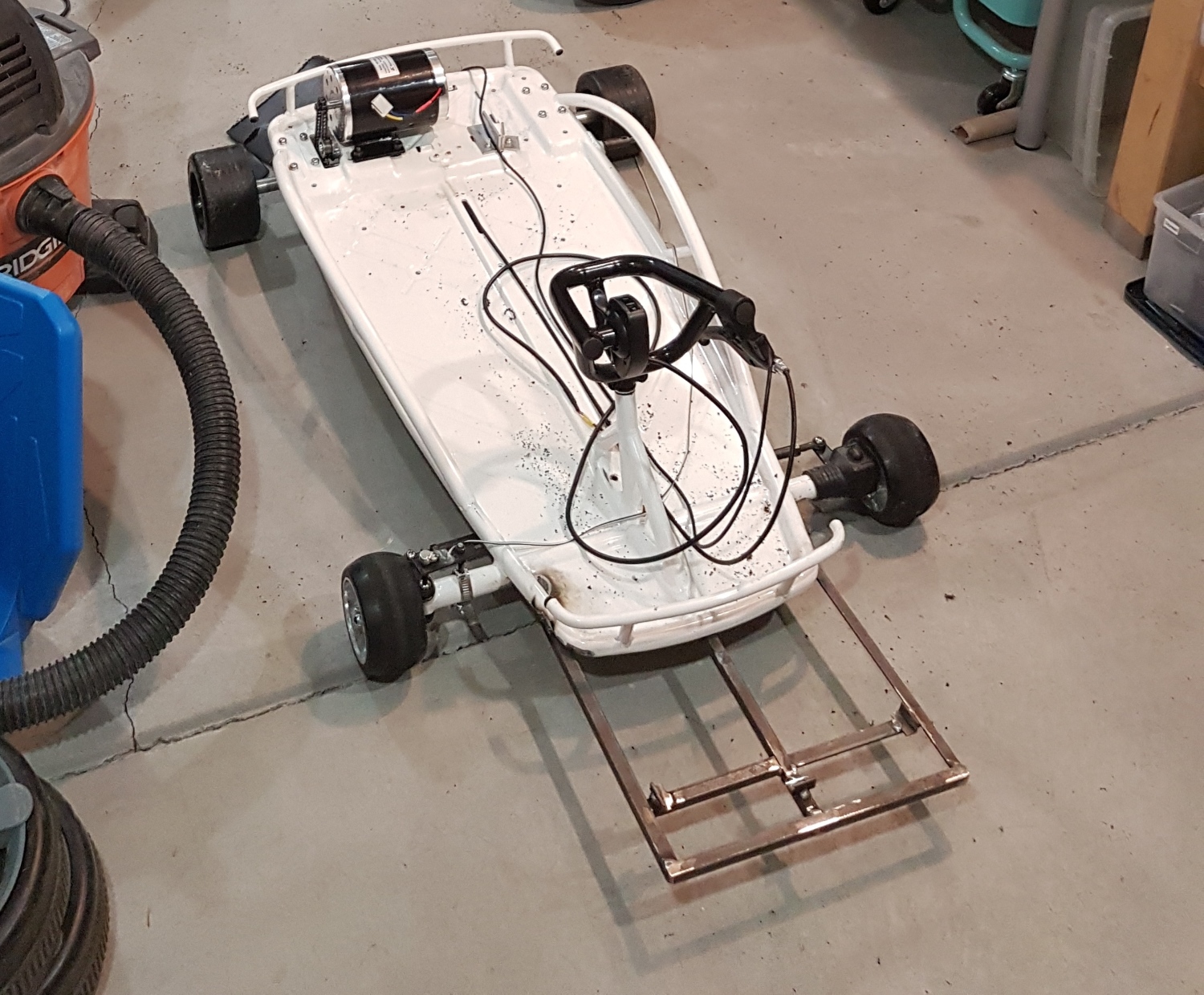
The original batmobile chassis blow molded plastic at its finest. The wheels are hollow, the motor is designed to move a child slowly (and reasonably safely), and the steering is littered with bits of metal but mostly loose and wobbly. While the stock chassis was capable of moving adults weighing in at around 200lbs, we knew it wouldn’t handle racing, so we decided to find a metal chassis to sit underneath.
Note the size of the motor and battery. Those are about to get much larger.
Razor is known for their kick scooters, but they’re in the electric go-kart market as well. We found a Razor Drifter Open Box for $165. The Drifter had the steering, brakes, wheels and chassis sorted out for us! Additionally, the Drifter came with a stock 24V battery, 250W motor and 250W motor controller.
Many PRS and AVC competitors are talented enough to weld their own chassis together. DIY welding is a great way to save money, but it may take weeks of fabrication. Because we planned to enter the autonomous field, we decided to find a ready-made chassis and spend our time building and debugging the autonomous bits.
Putting on a Hat
Once we had the Power Wheels and the Razor chassis, we had to combine the two.
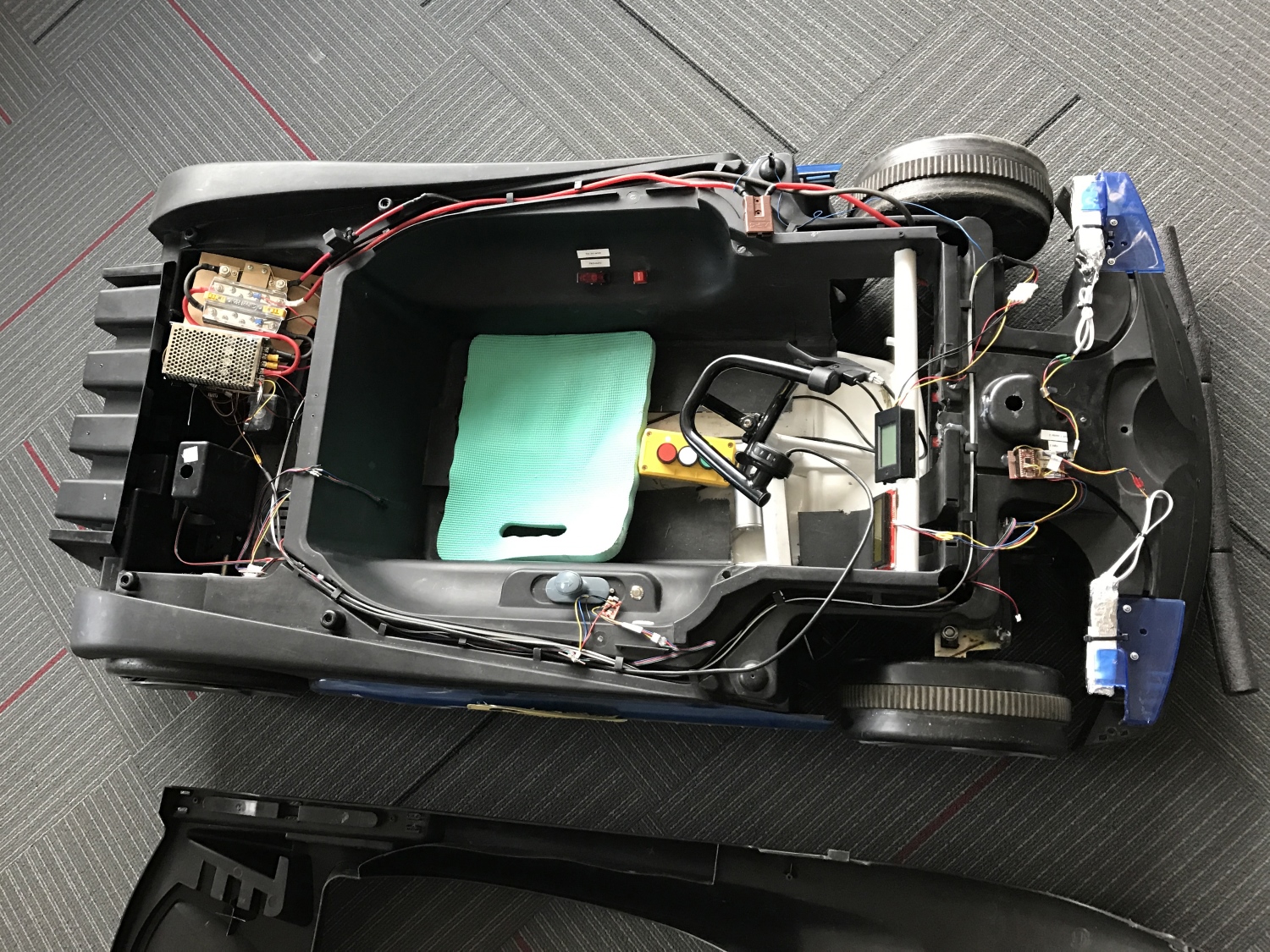
We slid the razor chassis underneath the plastic batmobile shell. The razor chassis has strength where we needed it most: steering, chassis, brakes, drive train, everything. The plastic batmobile is just there as a shell. The four solid plastic+rubber razor wheels make contact with the ground. The four hollow batmobile wheels hover above the ground and are there only for cosmetic looks (for the lulz).
A Power Wheels meets a Drifter
At some point you have to get out the reciprocating saw and severely modify your beautiful Power Wheels. We laid the Batmobile over the Razor and proceeded to chop off all the bits that got in the way.
Bare metal chassis before shell is laid on top
Seats? Where we’re going, we don’t need seats!
Pleasingly, the Batmobile sits on top of the chassis under its own structural support. We didn’t need to add all-thread or other standoffs. Even though they don’t do anything, we reattached the original wheels just so it looked extra wacky.
Motor and Motor Control
Moar!
In 2016, A+PRS allowed 48V systems, so the first thing we did was remove the 24V motor and install a 1,000W 48V/21A motor. The PRS rules limit any system to 1,400W, so we could have gone larger had budget constraints not been kicking in fast. New mounting holes were drilled into the chassis, and a different gear had to be mounted to the end of the motor. But it all went well. The stock chassis even included a chain tensioner that proved invaluable!
The MY1020 48V motor we used is common on the PRS circuit and performed great. However, our original 1,000W motor controller (you should already be able to tell what’s coming) did not do so well. Our first tests of the 48V system in an open parking lot worked great until the motor controller overheated and failed. And when MOSFET-based motor controllers fail, they fail unsafe, meaning our vehicle decided to go to 100 percent throttle and stay there. This is why we have safety switches! Alicia and I were able to kill the vehicle before anyone got hurt.
This failure should have been prevented: a motor controller should be rated for at least 2 times what you calculate your maximum load will be. In our case, if we wanted to control a 1kW motor, we should have been using a motor controller rated to a constant 2kW load. Luckily, the A+PRS rules don’t require you to record how much money you spent (and burned up); you have to report only what is on the vehicle as it rolls on race day.
The new, larger 5kW motor controller
We quickly located a larger, 5kW motor controller (this one even had reverse!) and got it on order. This larger motor controller has been working swimmingly ever since. Find a motor controller with reverse. You’ll be tempted to drive your souped-up Power Wheels in weird places (like the SparkFun inventory aisles), and a reverse gear allows for hilarious 5-point turns.
Brakes
Go-kart drum brakes on eBay
The Razor chassis had the classic drum brake, perhaps the weakest link of the Razor. While the stock brake was probably the appropriate size for a 75lb child with stock 24V batteries, our brakes got really squishy once we added an additional 125lbs of meat bag, batteries and plastic bits. We rarely, if ever, used the brakes during races, but the PRS rules stipulate that your qualifying lap must end with the driver crossing the finish line and braking to a stop:
At the end of the hot lap, your car will have to come to a complete stop within 18ft of when its transponder crossed the start/finish line. Deliberately skidding, swerving or spinning out is not an acceptable method of braking for the brake test.
Alicia had to do an impressive combination of hard braking, swerving, skidding and sliding with such a dramatic flair that she wooed the judges into not noticing how dodgy our brakes were. We’ll have disc brakes installed before we roll in the 2017 race.
Batteries
Battery holder welded onto the front of the chassis
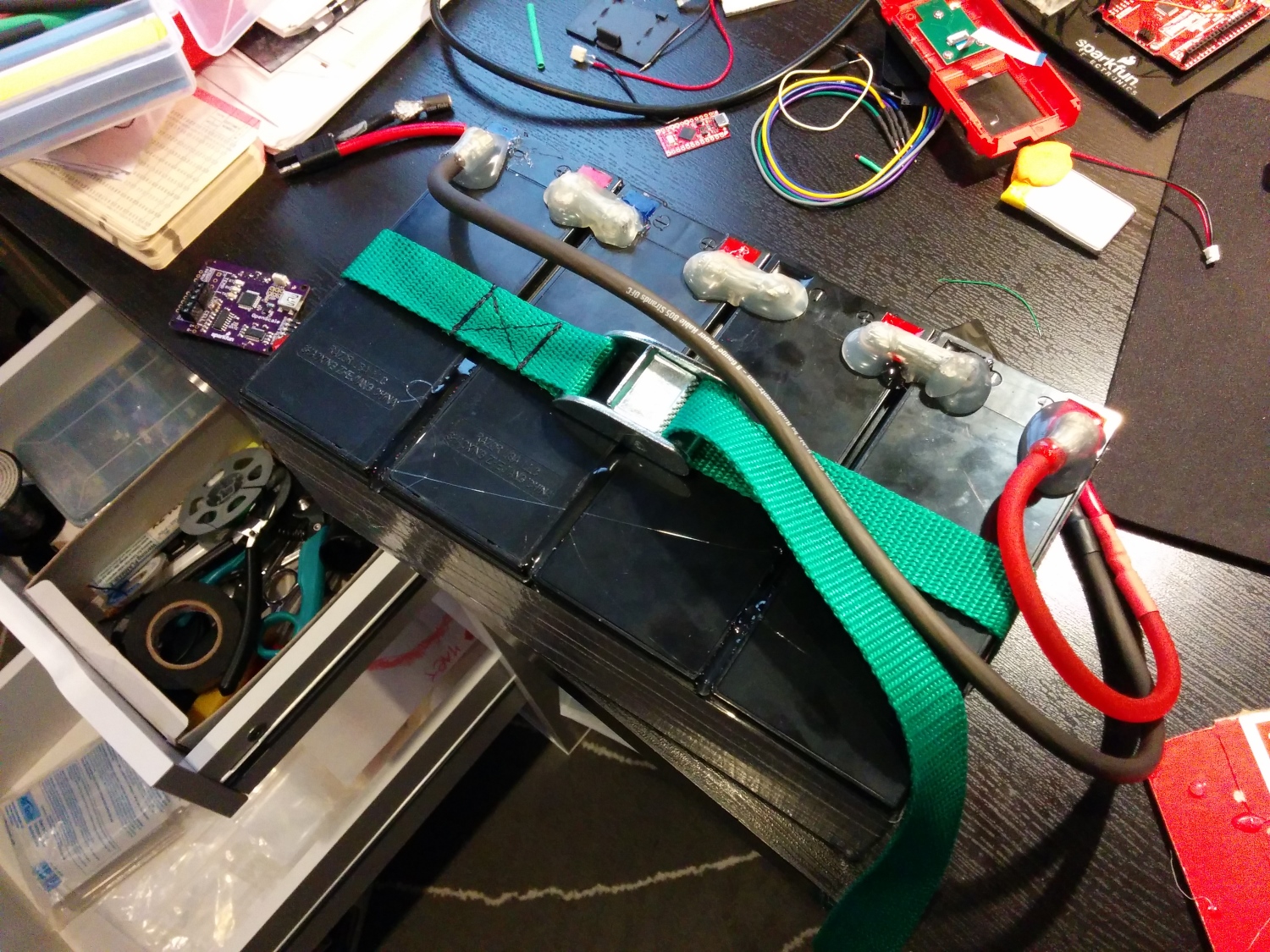
As part of the motor upgrade, we needed to increase the battery voltage to 48V. To save money, we reused the super common batteries that came with the 24V Razor chassis. Razor was smart; they looked at the SLA (Sealed Lead Acid) battery industry and picked the most common size. This just happened to be the same battery that goes into nearly every UPS on the planet. We purchased two additional UPS-size batteries (way cheaper than buying Razor-brand batteries) and wired them in series.
Four batteries combined in series
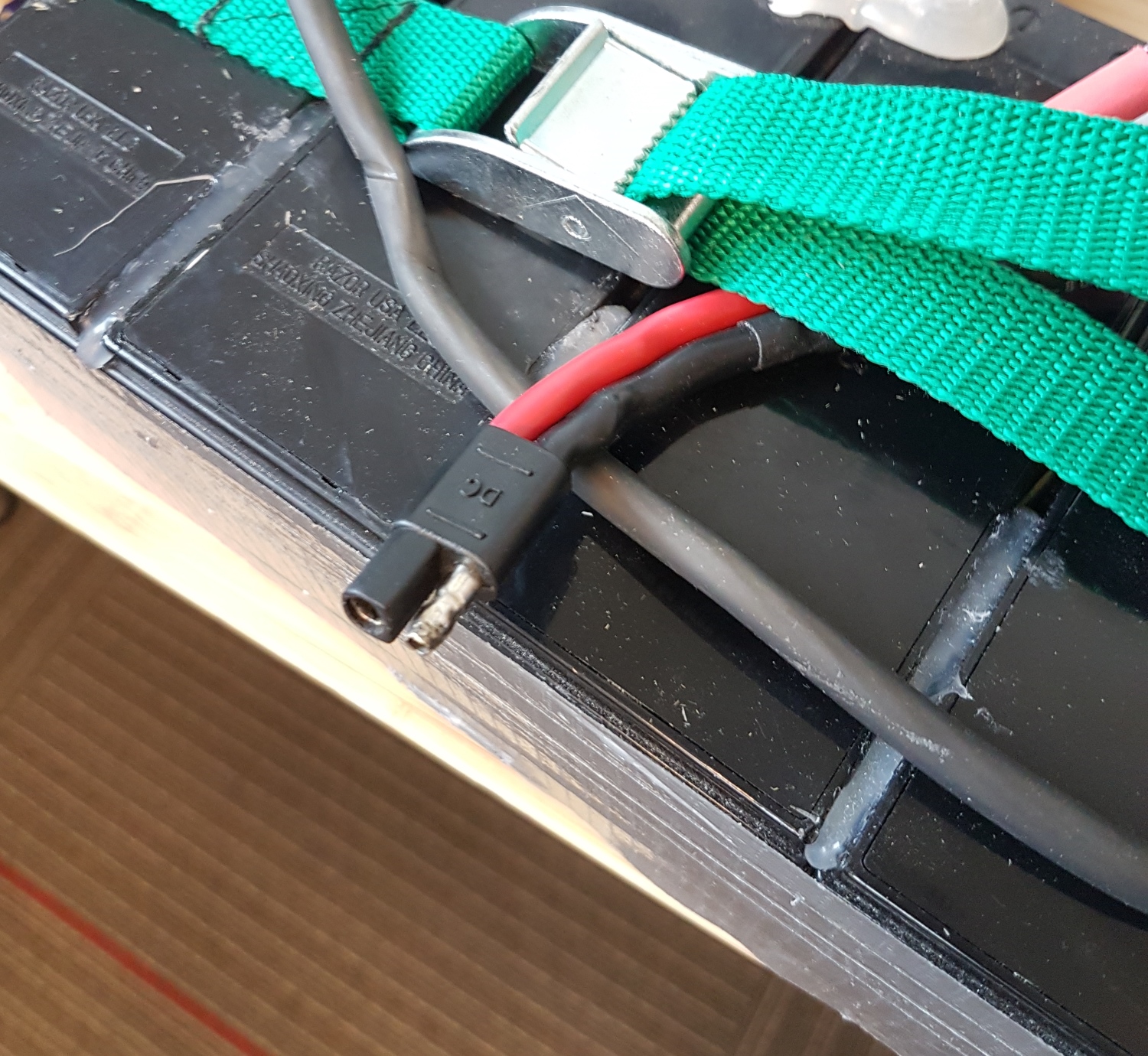
Taping the cells together and adding a bead of hot glue between the cells made the pack nicely rigid. A low-cost, polarized, high-current connector finished off the pack. We had an old strap lying around that made all the difference in the world; it’s a lot more comfortable carrying the pack one-handed by its handle than with two hands underneath.
Avoid fires and other bad things. Use polarized connectors for your batteries.
Wire
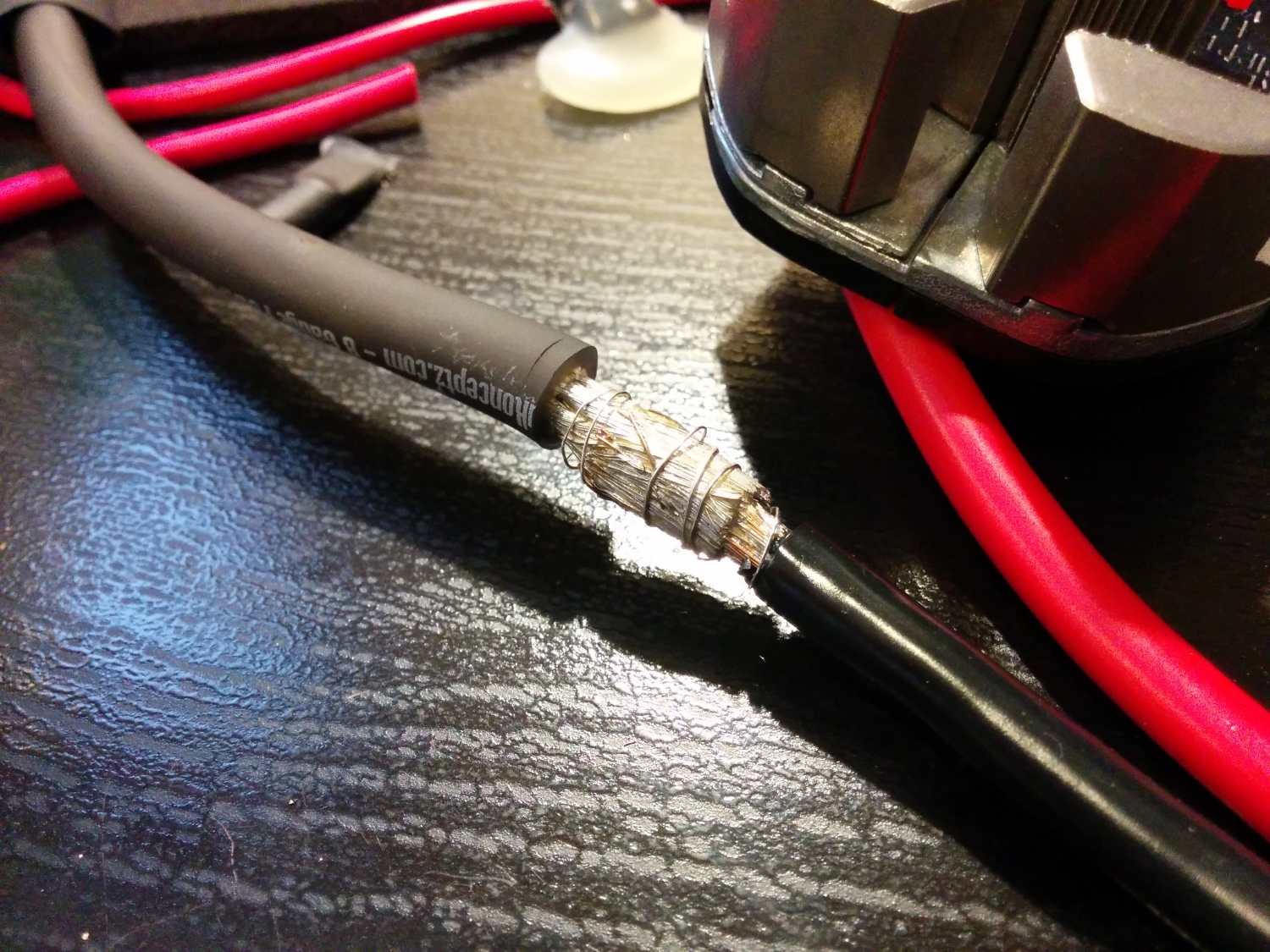
Soldering large-gauge wire
We originally spec’d out some really nice, super flexible silicone-sheathed 8AWG wire for power distribution. I don’t think we would do this again; 10AWG would have been fine, and probably even 12AWG. As 8-gauge is far less common, the wire and connectors are more expensive, and the larger gauge wire takes a lot more soldering heat — it’s just a pain to work with. If you need the current capacity, go for it, but for our extremely zippy, 48V 20A vehicle, 8-gauge wire was overkill.
If you decide to use super flexible, large gauge wire, spend some time on the internet reading about how to solder this type of wire.
The best technique I found:
Make sure you’ve got heat shrink in place
Turn your soldering iron up to 425C (way hotter than the 325C usually needed)
Push the ends of wire together
Wrap tightly with 30AWG wire wrap wire
Liberally apply flux
Heat and insert lots of solder until the joint turns silver
Here’s a good video demonstrating this technique:
Kill Switch
We documented how to build a wireless kill switch while making margaritas. It was a ton of fun, so we’ll skip the bits of the wireless kill switch system here.
Zroooommmm!
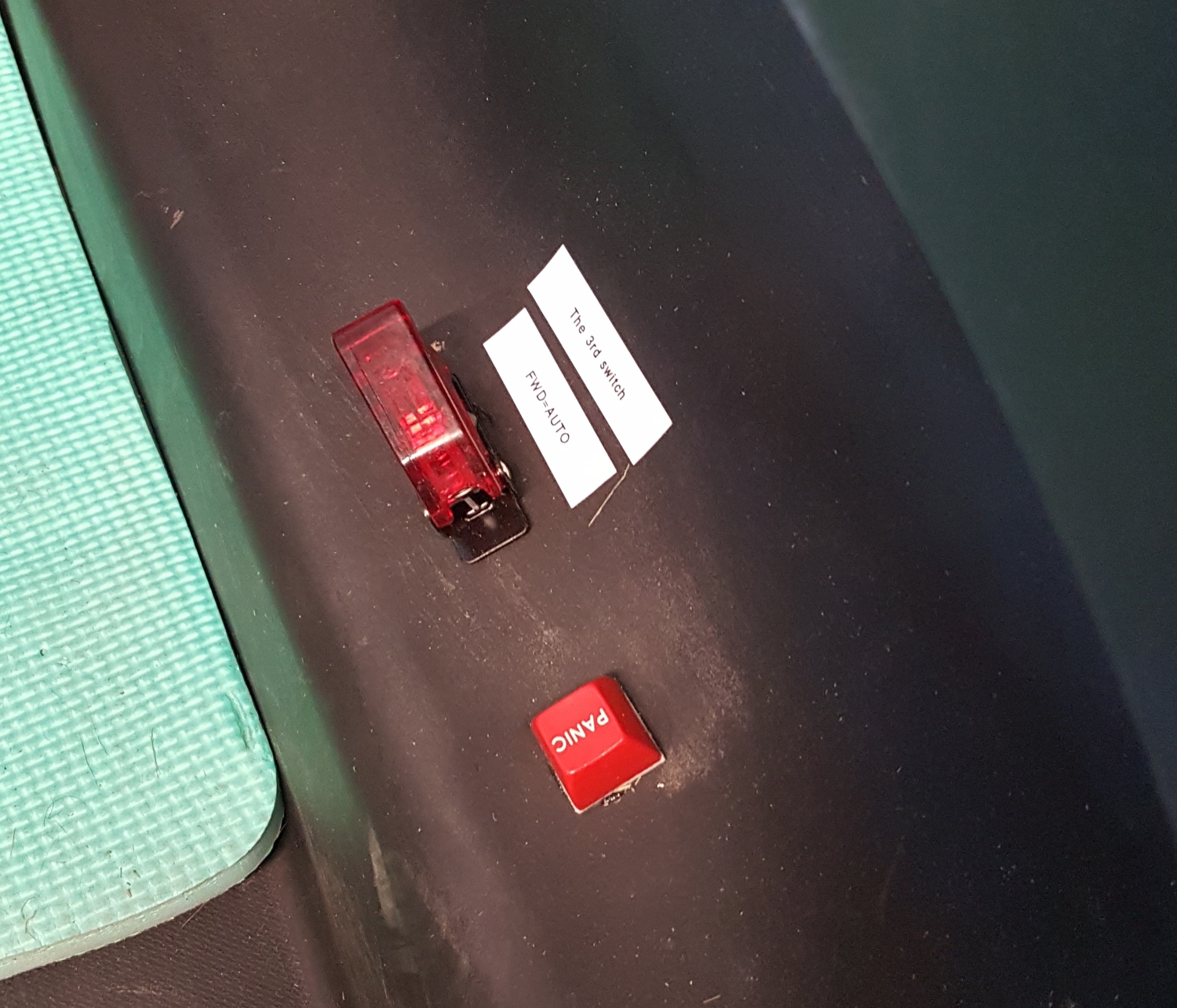
In addition to the wireless disconnect, we had a large, red mushroom kill switch that disconnected the battery with a pleasing and authoritative ”thunk.” Pulling up on the mushroom button reconnects the battery to the system.
Batman logo or Bitman logo?
As a pleasant bonus feature, the mushroom kill switch got rid of the nasty sparks. When connecting the battery to the motor controller, there was such an inrush of current into the capacitors and electronics that the connector would spark. Once we got the kill switch installed, we could connect/disconnect batteries without these sparks.
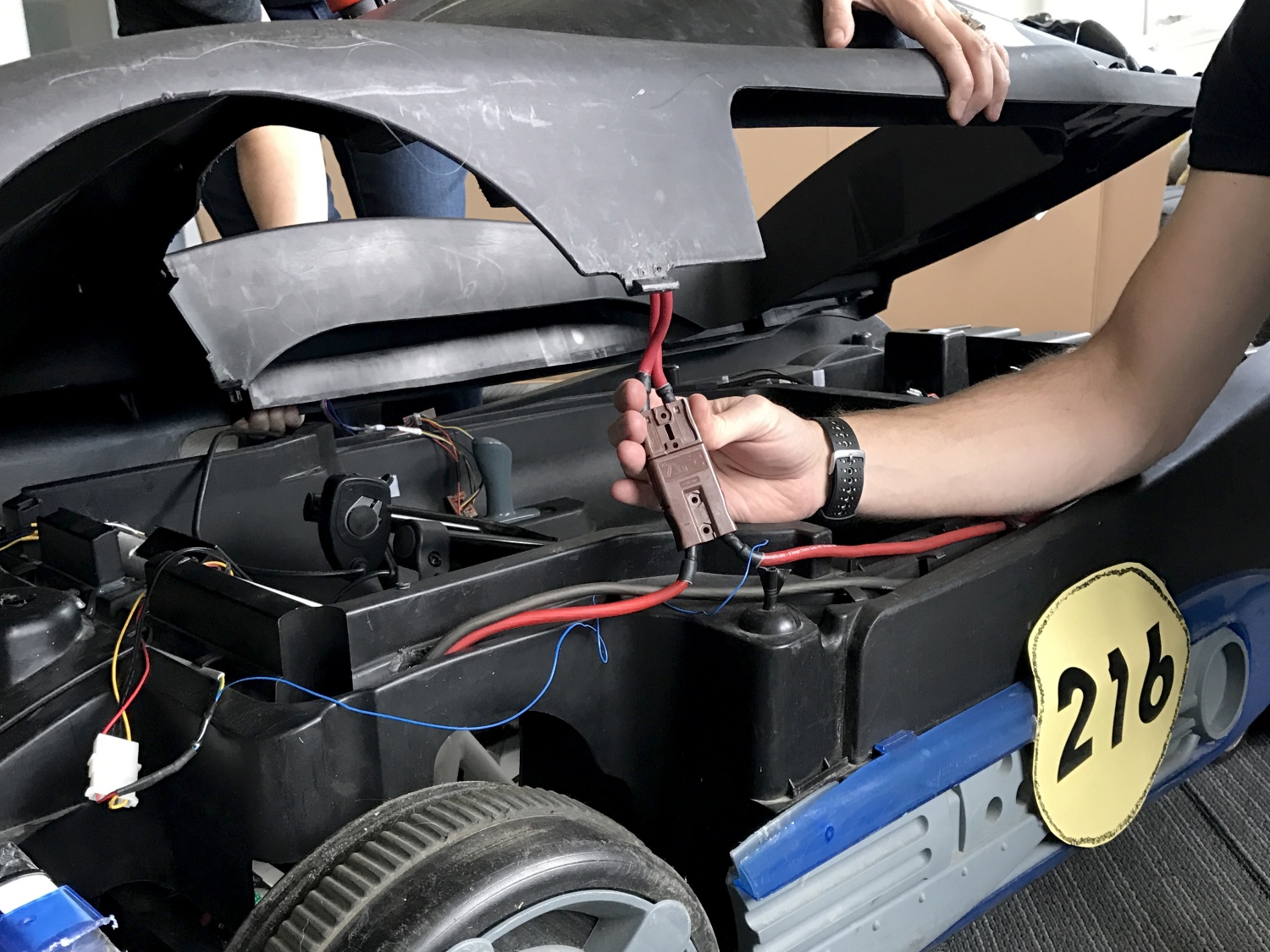
Connector between kill switch and power bus
The top of the Batmobile was easily removed, but because it had the kill switch installed we needed a way to disconnect it easily from the power bus. We found a great high-power connector in a dead server UPS. These are often called ”winch connectors”, because they are higher current. With this connector, we are able to quickly disconnect the kill switch and remove the top when we need to get at the inside of the vehicle.
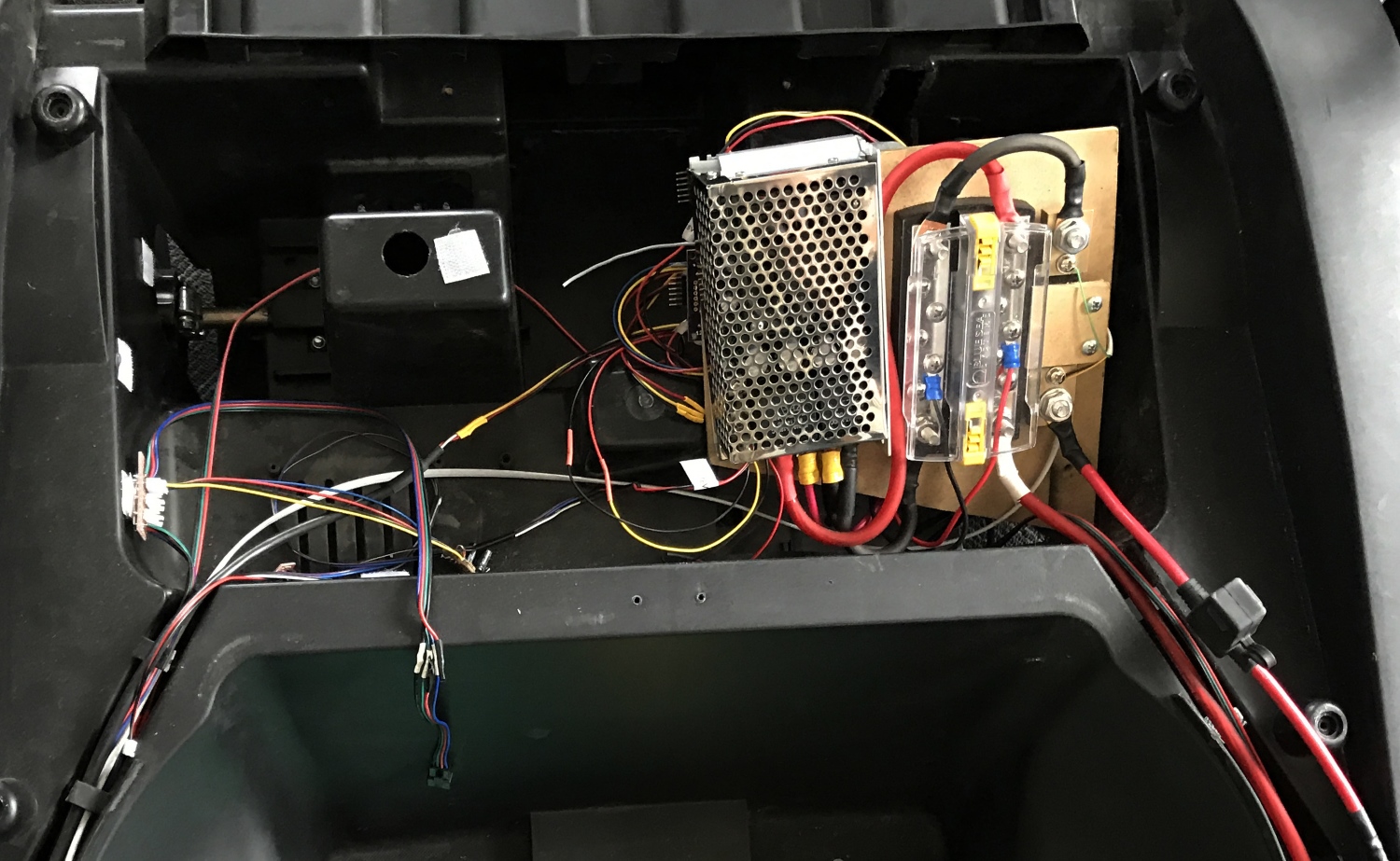
Control Electronics
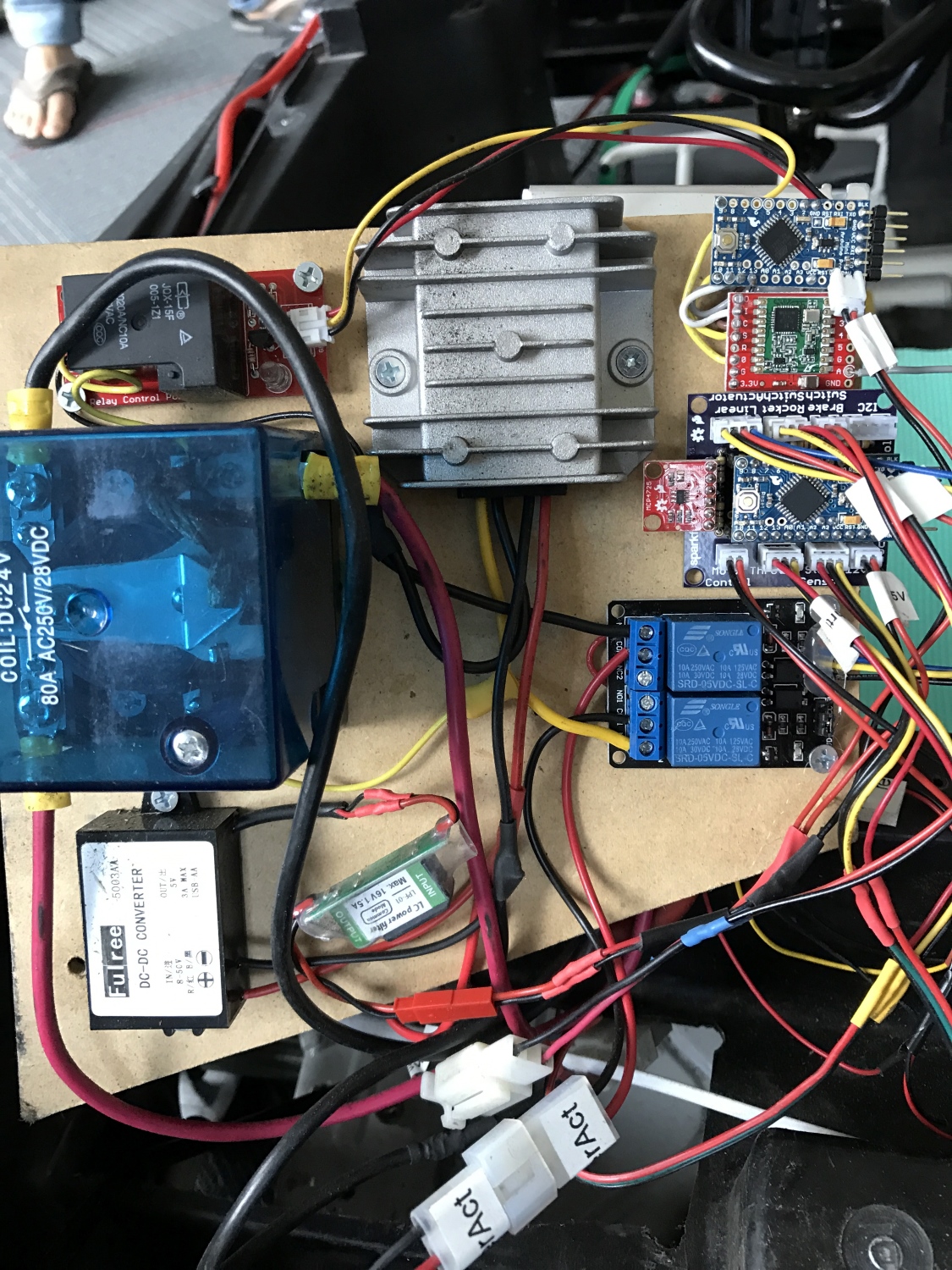
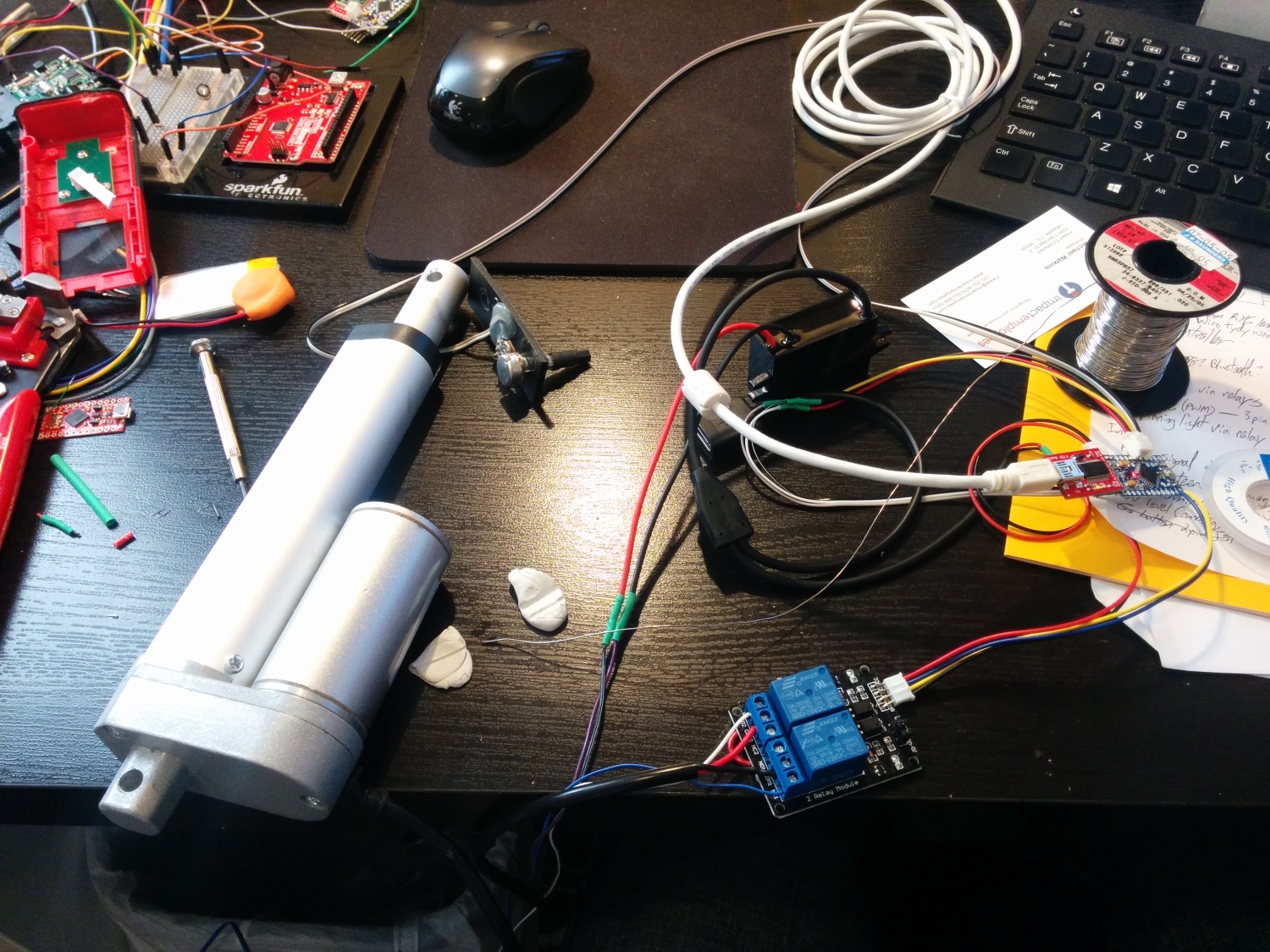
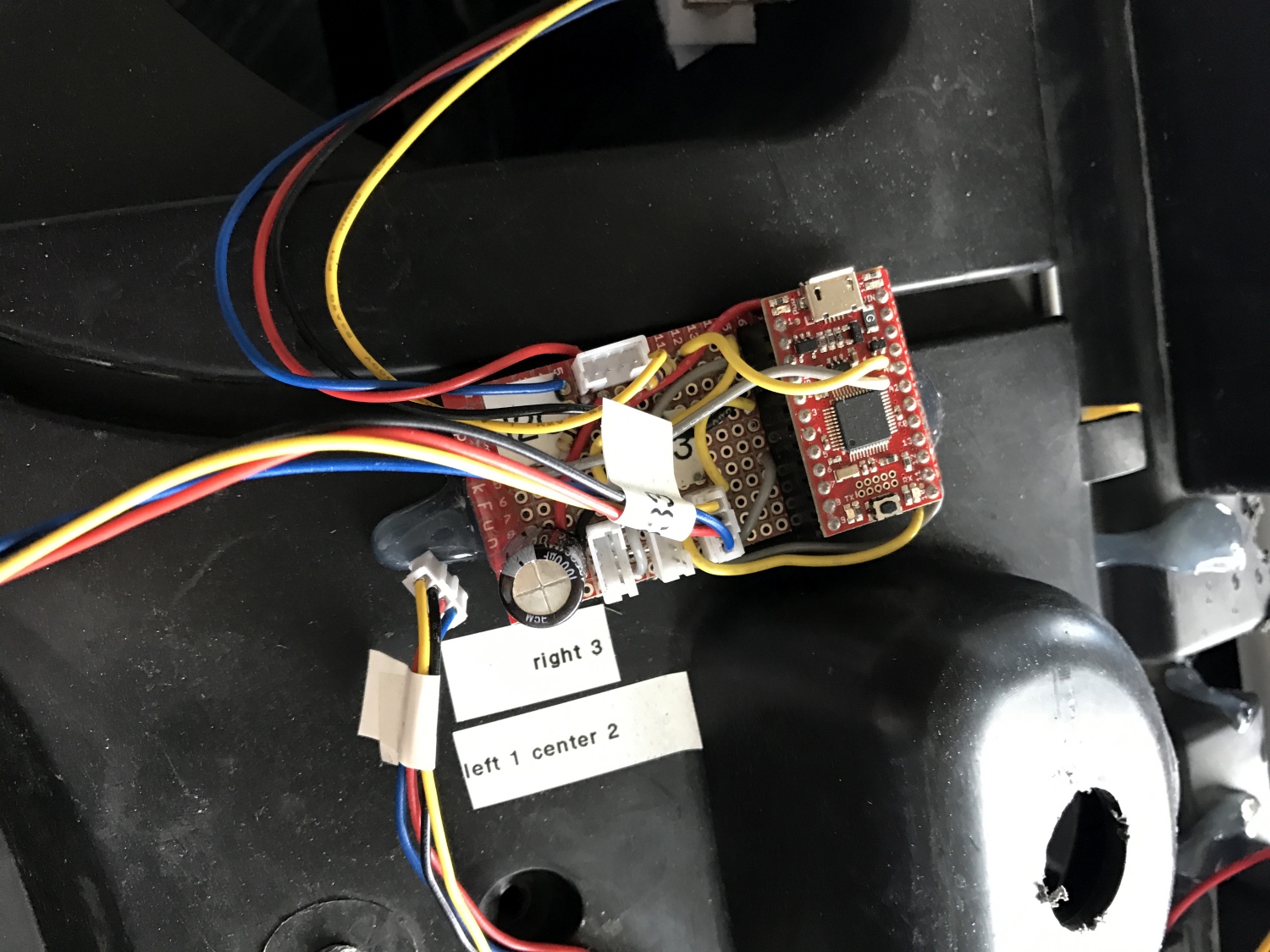
Power converters, motor kill relays, steering relays, locomotion controller and wireless communication
The control electronics are complex. We had a total of seven microcontrollers on this beast, plus three used in the distance sensors for a total of 216 bits of processing power. The system operated on an I2C bus with the brain sending commands to the locomotion controller and LCD and receiving data from the sensors.
The wiring underneath the Batmobile cover
For a previous 2010 AVC entry, I did everything on a single microcontroller. This made coding and debugging a challenge. On our 2016 entry, we focused each sub-system to do one thing very well.
The subsystems are broken down as follows:
Brain Controller: A SAMD21 Mini was used to communicate with and process all the data from the distance sensors, GPS and compass, and to send out commands to control throttle and steering. It monitored a start switch and relayed debug information to an LCD.
Locomotion Controller: An Arduino Pro Mini read the throttle, steering position, brake switch and autonomous rocket switch. It controlled motor speed and the linear actuator for steering.
Wireless Kill Switch: An Arduino Pro Mini lived in the wireless kill switch, a requirement for the autonomous part of our Batmobile. To learn more about the wireless controller, check out our tutorial on how to build a wireless kill switch.
A dedicated Arduino Pro Mini controlled the relays for the wireless kill switch system.
Debug LCD: We counted our LCD screen as a microcontroller since it has an Arduino in it.
Sensor Combinator: A SAMD21 Mini polled the serial GPS and I2C compass.
Laser Controller: A SAMD21 Mini controlled the three serial-based laser distance sensors, combined the relevant information and responded to requests from the Brain.
Three STM32s were the brains within the laser distance sensors.
Interested in learning more about distance sensing?
Learn all about the different technologies distance sensors use and which products would work best for you next project.TAKE ME THERE!
Control Electronics – Brain
The Brain is a SAMD21 Mini. It sends commands over the I2C bus to the locomotion controller and debug LCD.
4-pin JST connector at the top of the image: We used a 4-wire bus (5V, GND, SDA, SCL) for communication and had various taps throughout the bus to allow devices to be attached. This worked really well and allowed for devices to be moved around when needed.
4-pin JST connector to the left: This was four wires to the button. To tell the vehicle to begin navigating under autonomous control, we used a metal momentary push button that illuminates when everything is online and happy. The human presses the button twice, and the car commences racing.
Big gray handle: This was the original forward and reverse knob that we reused to control the direction switch on the motor controller (two pins when shorted together caused one direction, when open caused the other direction).
The massive and poorly written control code for the Brain can be found here.
EEPROM for Waypoints
The SAMD21 does not have internal EEPROM. Because we needed to store GPS waypoints and other configuration data to non-volatile memory, we used an external I2C EEPROM. Yes, you can use something called emulated EEPROM on the SAMD21, but, every time you reprogram the board, you will overwrite anything previously stored in emulated EEPROM. The external EEPROM made it much easier to store and recall waypoints and settings without having to mash together in the main control code.
Control Electronics – Locomotion
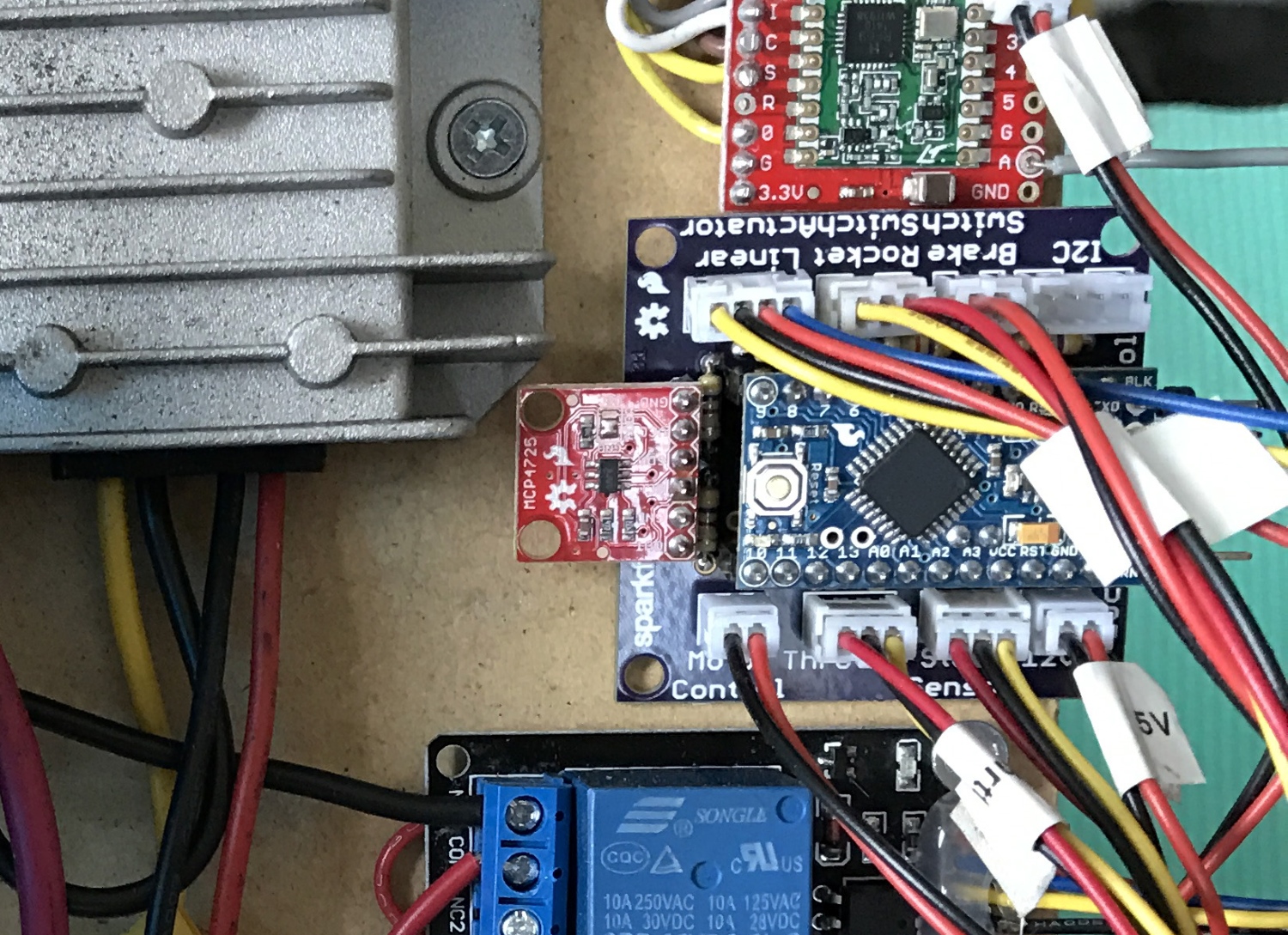
Locomotion Controller hooked up
Note the polarized connectors and prodigious labeling! You DO NOT want to be guessing what gets plugged into where at 11 p.m. before race day. The Locomotion Controller code is available here, and the PCB layout here.
Because we eventually wanted this beast to be autonomous, we needed to put a controller in the middle between the throttle and the motor controller. We used an Arduino Pro Mini that did a huge variety of sensing and control:
Read the throttle
Output analog voltage to the motor controller
Read the brake switch
Read the steering position
Controlled the linear steering actuator
Read the human/robot control switch
Received and responded to control commands over I2C
Don’t panic
The controller would monitor the rocket switch and brake switch. If a human ever pressed the brakes or turned off the rocket switch, the controller would go into safety shutdown and ignore any commands from the brain.
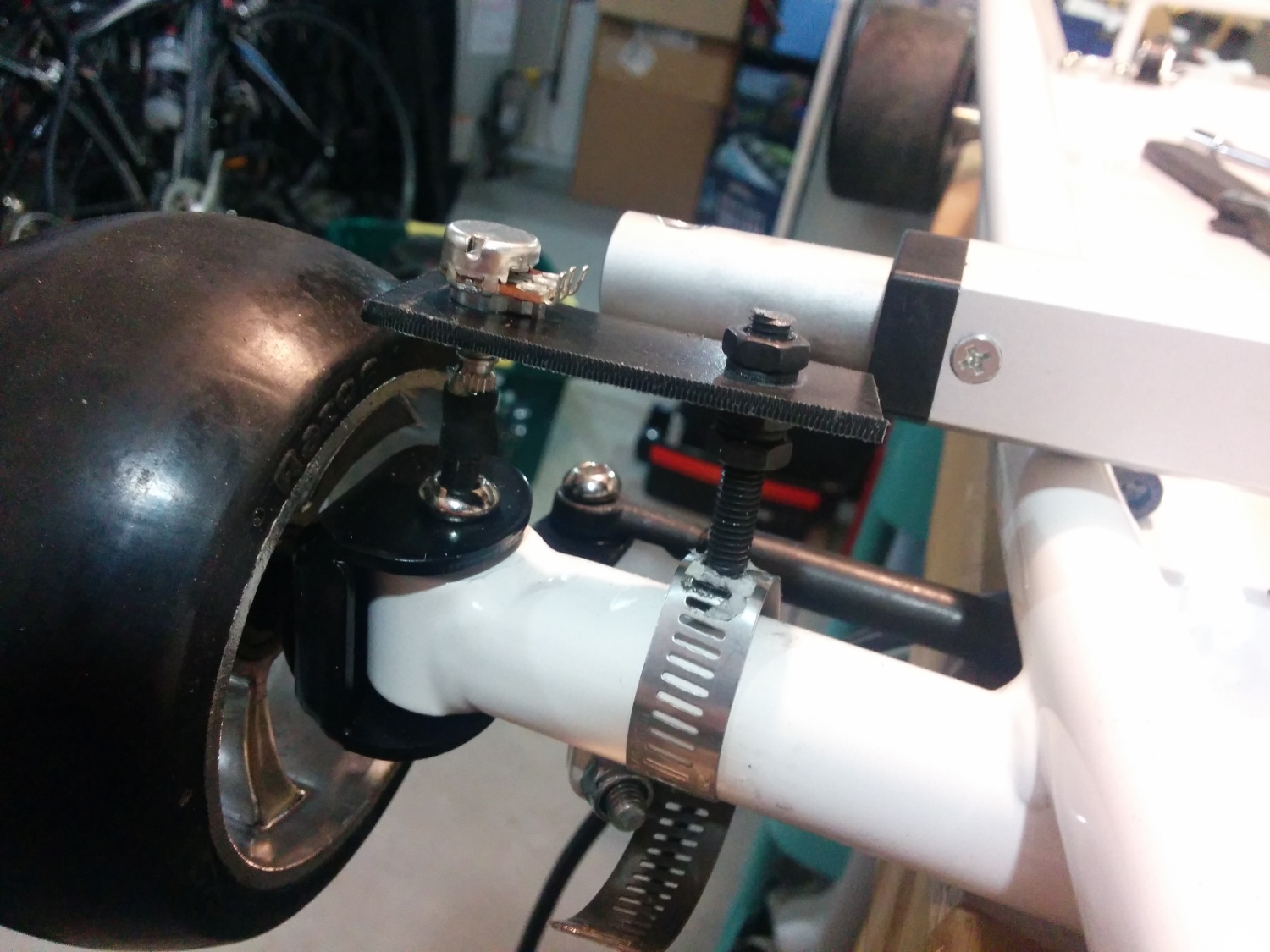
Steering was controlled using a 12V linear actuator over-voltaged to 24V for extra speed. Two relays controlled the forward/backward motion.
Steering position was obtained by cutting a hex wrench to about 1” and inserting that wrench into the bolt that rotates with the wheel. The wrench was then connected to a 10k trimpot using adhesive-lined heat shrink — this trick is known as the ”poor man’s coupler:” a 3-wire ribbon connected the trimpot back to the locomotion controller. It worked well, but we had to keep the analog signal wire away from the power bus; otherwise, bad noise got into the ADC readings.
Chassis with the Batmobile raised to see the steering actuator
For future vehicles, we’re going to change this setup. It worked well enough, but once the bolt connected the actuator to the steering, you couldn’t drive the car; only the computer could. So rather than driving the car to the start line, we had to carry this 75lb beast. So painful. In the future, we plan to find a back-drivable actuator or maybe drive-by-wire.
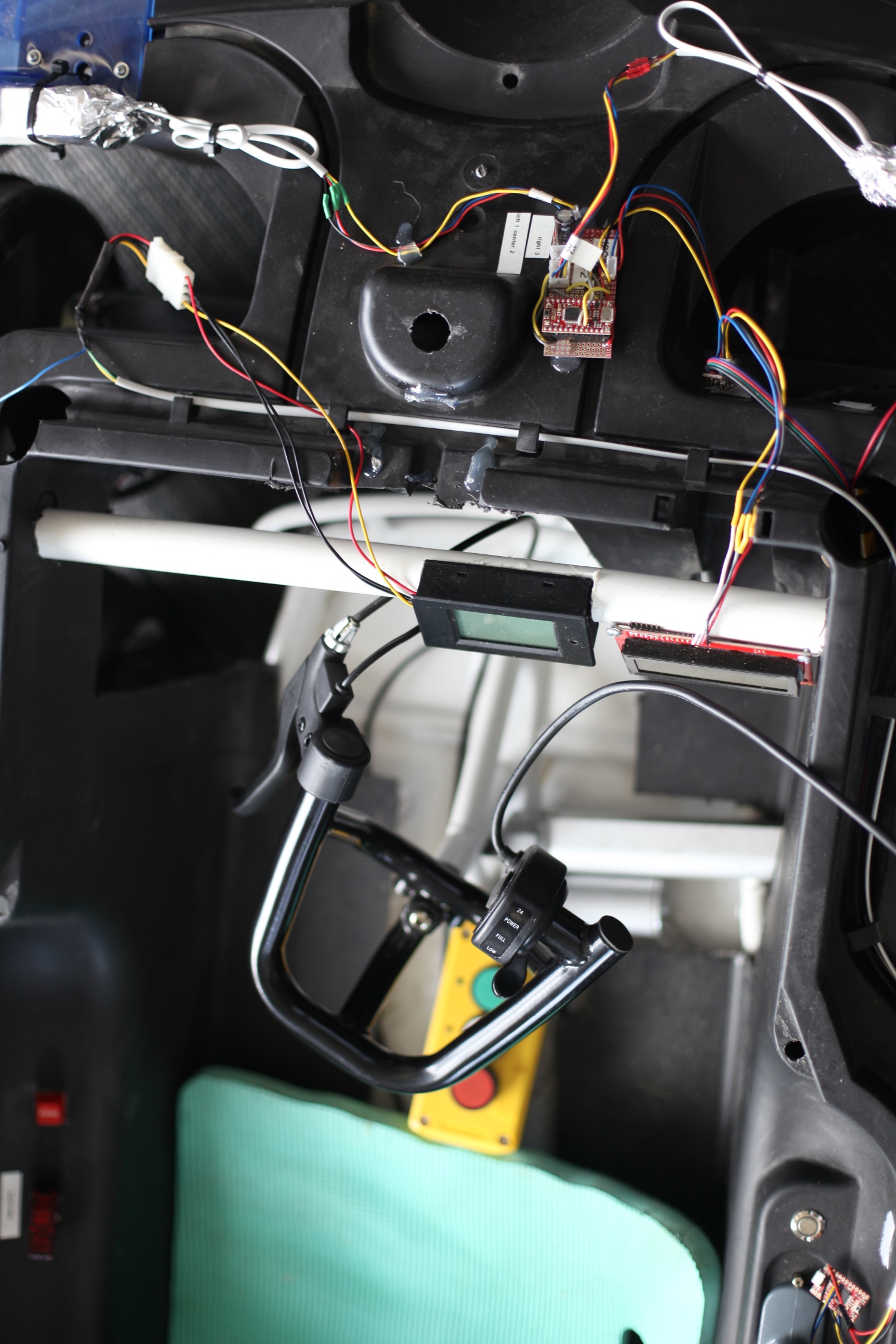
Control Electronics – Displays
Throttle and displays
We cut notches in a 1” tube of PVC and mounted two displays in the Batmobile. The center display is the power meter. Nearly every A+PRS and PRS competitor used these super low-cost power meters to show the battery voltage. We had some issues with it, but it worked well enough. In the end, we noticed the drop in vehicle speed (indicating battery drain) long before we noticed the display was indicating a lower pack voltage. But, it did help us make decisions about when to pit (never!) because the nominal 48V pack voltage was dropping down to 42V where we could begin to damage the SLA.
The display on the right is the 20×4 character debug LCD. It’s basically a souped-up version of our 20×4 SerLCD display (it’s a prototype product, coming soon to a theater near you!).
Control Electronics – Sensors
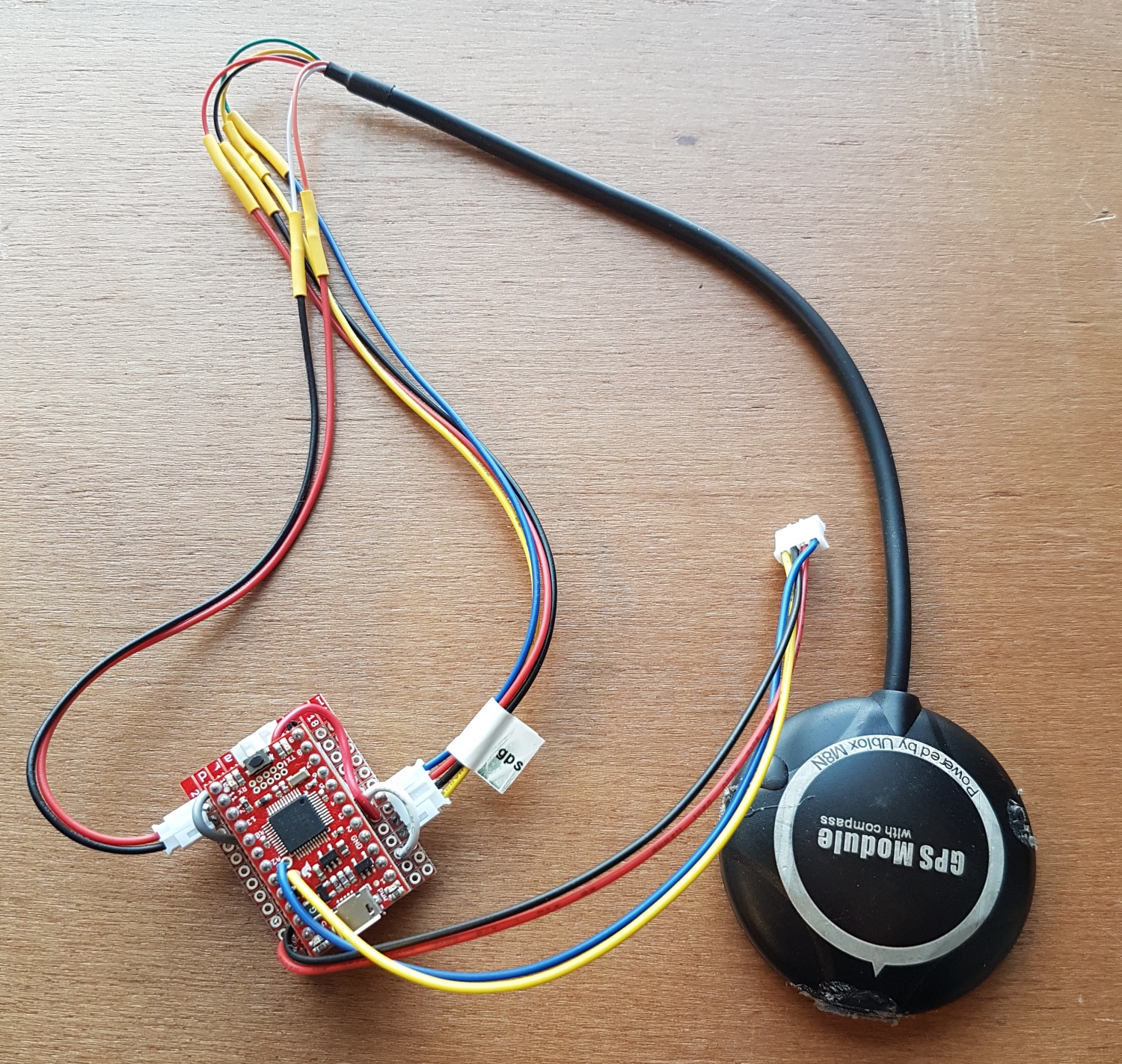
GPS+Compass connected to SAMD21
The Sensor Combinator is a SAMD21 Mini that monitors a GPS receiver and an I2C compass. We decided to use a SAMD21 because it can be configured to have multiple hardware serial and I2C ports. This is needed if you want to isolate I2C devices from the main bus. We wanted the Brain to ask for the heading and get the heading; the Sensor Combinator took care of the low-level I2C function of the compass and heading calculations. Similarly, the Combinator listened to the serial stream from the u-blox based GPS module and parsed out all the needed Latitude/Longitude/SIV information.
The code for the Sensor Combinator can be found here.
Control Electronics – Lasers
Laser tape measures seen on the front of the car, wrapped in foil
We hacked three laser tape measures in order to get distance to any objection front, left or right of the car. Laser tape measures are getting cheaper, and while the read rate (3Hz at the best of times) is not great for LIDAR, it’s fast enough for basic, low-cost autonomy.
Laser Controller at front of car
Unfortunately, the laser tape measures threw off enough RF to interfere with our GPS module, so we wrapped the lasers in foil. These sensors deserve their own tutorial, which will be written soon.
Laser Controller with labels
Again we chose the SAMD21 Mini to help us control and combine the serial information coming from the three sensors. The Laser Controller would send the pertinent control strings to the tape measures and monitor the responses, combining them into distances for left/right/center. The Brain would request these values from the Laser Controller over I2C.
Note the prodigious amounts of labels and polarized connectors (JSTs work great!). This system required lots of debugging but worked well because we were able to quickly disconnect and reconnect various aspects of the system.
The code for the Laser Controller can be found here.
Problems
As with any project, we had a large number of problems and hurdles to overcome along the way. Here are a few that really hurt.
** EMI and GPS **
The Laser tape measures caused significant interference with GPS reception. We eventually moved the GPS module to the rear of the car, which improved positional accuracy. However, the motor caused interference with the compass.
** DC Motor EMF **
DC motors produce a ton of electromagnetic noise. We originally had the 48V battery powering the entire car. However, when the motor would kick on, it would cause enough ripple to make the Brain glitch and reset. We tried powering the I2C bus separately, but, because the Locomotion Controller needed to be attached to the motor controller, a GND connection had to be shared. The noise eventually found its way over the I2C bus. In the future we will optically isolate the I2C bus.
** Lack of EEPROM **
Because the SAMD21 doesn’t have internal EEPROM, we were unable to store GPS waypoints on the board. We fixed this by using an I2C-based EEPROM.
** Switching Steering Between Driver/Driverless **
It was difficult to attach and detach the linear actuator from the rack and pinion steering. Once the actuator was attached to the steering, a driver could not actively steer (for example, to the starting line). This could be fixed with a different actuator that could be back-driven, or we could go full monty and detach the steering column from the steering and have it control a trimpot that, in turn, controls the linear actuator (drive by wire).
Tips / Best Practices
Tip 1) Start early — These vehicles take a large amount of time. Get together with friends and start hacking. It’s a great labor of love, and drifting in a 15mph go-kart will make you giggle.
Tip 2) Get reverse — Get a motor controller with reverse. It will make it so you can drive your car where you want it instead of carrying your car where you need it.
Tip 3) Use connectors! — I’ve written about using connectors a few times. Use polarized connectors and a label maker to make it clear what plugs in where.
Tip 4) Size your motor and motor controller correctly — We blew our motor controller because it was underrated. A friend of ours smoked his motor because he was pushing too much current. Pick your system voltage and current, and then double the ratings wherever you can.
Tip 5) Beware of interference — These vehicles can pull 30 amps or more when accelerating, which can cause large electromagnetic fields. Keep unshielded cables and sensitive sensors away from power wires.
Tip 6) Wireless control and sensor logging — After you pick up your 75lb vehicle and drag it to the start line for the fifth time, you’ll understand the need for remote control. Create a wireless system that allows you to take over control of the vehicle from afar so you can drive it where you need it. And transmit the sensor data so you can see what the vehicle is doing.
Detta är en artikel från SparkFun, December 17, 2012
Introduction
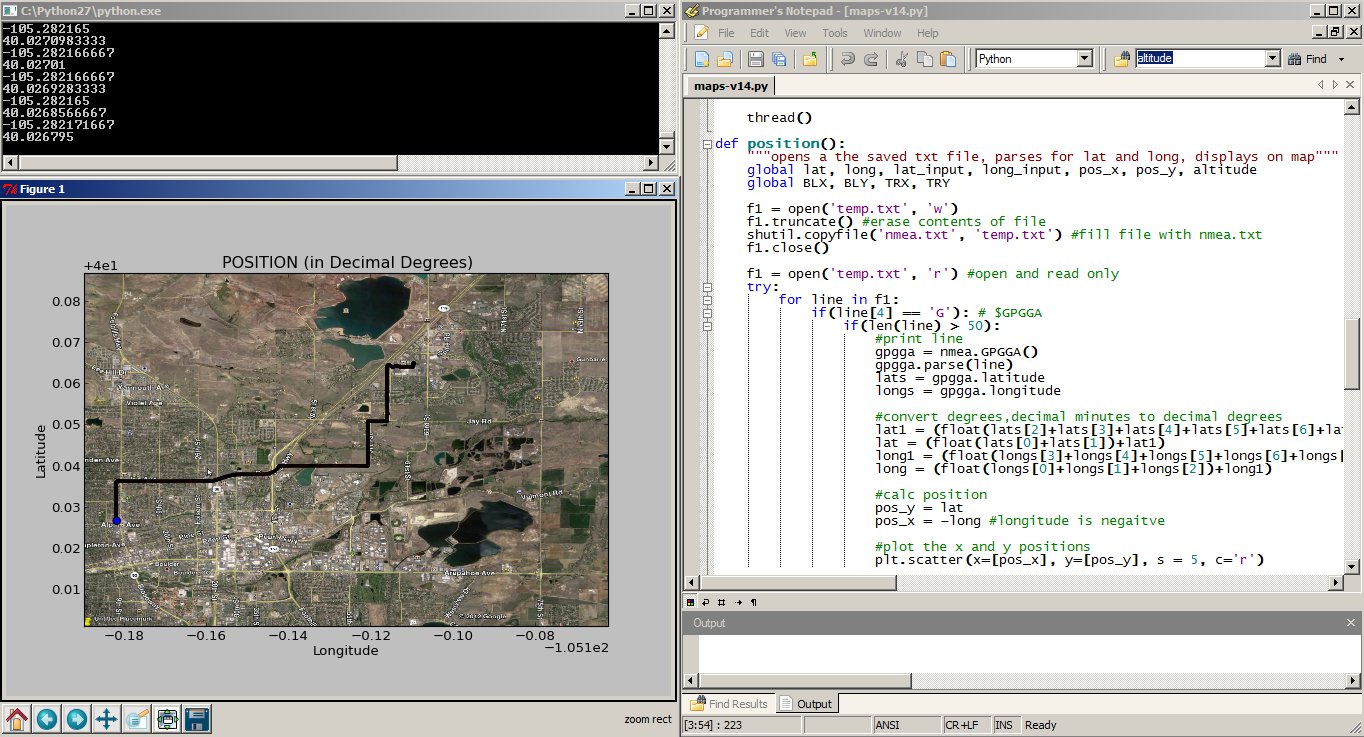
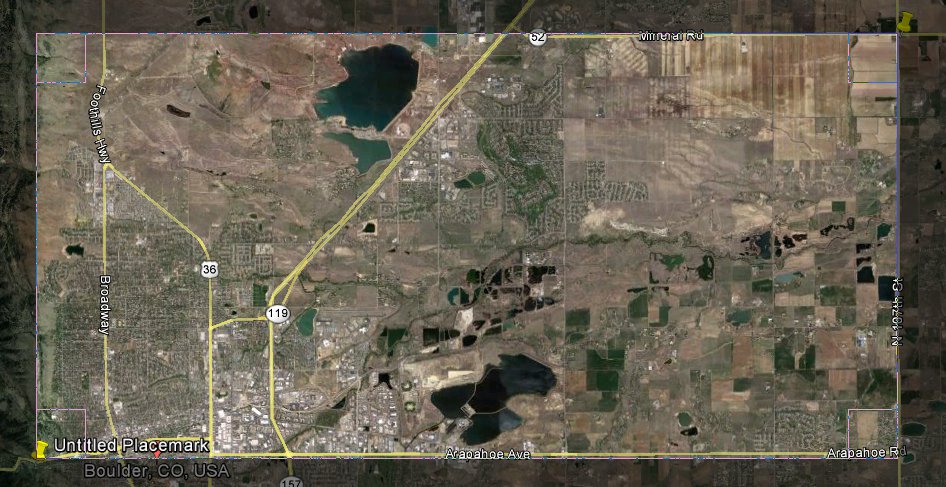
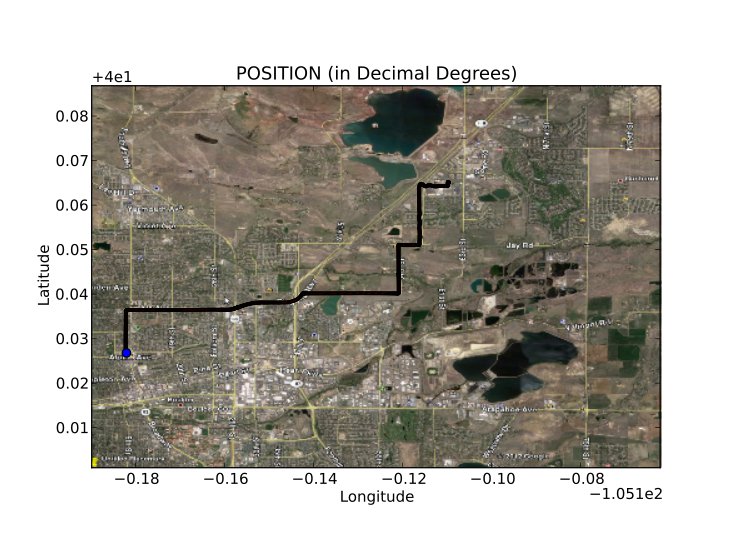
In my quest to design a radio tracking system for my next HAB, I found it very easy to create applications on my computer and interact with embedded hardware over a serial port using the Python programming language. My goal was to have my HAB transmit GPS data (as well as other sensor data) over RF, to a base station, and graphically display position and altitude on a map. My base station is a radio receiver connected to my laptop over a serial to USB connection. However, in this tutorial, instead of using radios, we will use a GPS tethered to your computer over USB, as a proof of concept.
Of course, with an internet connection, I could easily load my waypoints into many different online tools to view my position on a map, but I didn’t want to rely on internet coverage. I wanted the position of the balloon plotted on my own map, so that I could actively track, without the need for internet or paper maps. The program can also be used as a general purpose NMEA parser, that will plot positions on a map of your choice. Just enter your NMEA data into a text file and the program will do the rest.
Showing a trip from SparkFun to Boulder, CO.
This tutorial will start with a general introduction to Python and Python programming. Once you can run a simple Python script, we move to an example that shows you how to perform a serial loop back test, by creating a stripped down serial terminal program. The loopback test demonstrates how to send and receive serial data through Python, which is the first step to interacting with all kinds of embedded hardware over the serial port. We will finish with a real-world example that takes GPS data over the serial port and plots position overlaid on a scaled map of your choice. If you want to follow along with everything in this tutorial, there are a few pieces of hardware you will need.
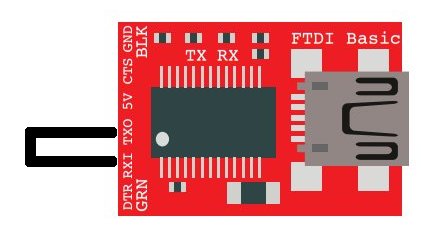
For the loopback test, all you need is the FTDI Basic. For the GPS tracking example, you will need a GPS unit, as well as the FTDI.
What is Python?
If you are already familiar with installing and running Python, feel free to skip ahead. Python is an interpreted programming language, which is slightly different than something like Arduino or programming in C. The program you write isn’t compiled as a whole, into machine code, rather each line of the program is sequentially fed into something called a Python interpreter. Once you get the Python interpreter installed, you can write scripts using any text editor. Your program is run by simply calling your Python script and, line by line, your code is fed into the interpreter. If your code has a mistake, the interpreter will stop at that line and give you an error code, along with the line number of the error.
The holy grail for Python 2.7 reference can be found here:
At the time of this tutorial, Python 2.7 is the most widely used version of Python and has the most compatible libraries (aka modules). Python 3 is available, but I suggest sticking with 2.7, if you want the greatest compatibility.
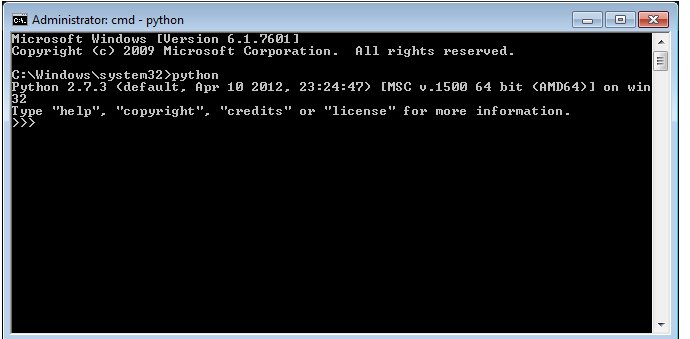
After you install Python, you should be able to open a command prompt within any directory and type ’python’. You should see the interpreter fire up.
If you don’t see this, it is time to start some detective work. Copy your error code, enter it into your search engine along with the name ’python’ and your OS name, and then you should see a wealth of solutions to issues similar, if not exact, to yours. Very likely, if the command ’python’ is not found, you will need to edit your PATH variables. More information on this can be found here. FYI, be VERY careful editing PATH variables. If you don’t do it correctly, you can really mess up your computer, so follow the instructions exactly. You have been warned.
If you don’t want to edit PATH variables, you can always run Python.exe directly out of your Python installation folder.
Running a Python Script
Once you can invoke the Python interpreter, you can now run a simple test script. Now is a good time to choose a text editor, preferably one that knows you are writing Python code. In Windows, I suggest Programmers Notepad, and in Mac/Linux I use gedit. One of the main rules you need to follow when writing Python code is that code chunks are not enclosed by brackets {}, like they are in C programming. Instead, Python uses tabs to separate code blocks, specifically 4 space tabs. If you don’t use 4 space tabs or don’t use an editor that tabs correctly, you could get errant formatting, the interpreter will throw errors, and you will no doubt have a bad time.
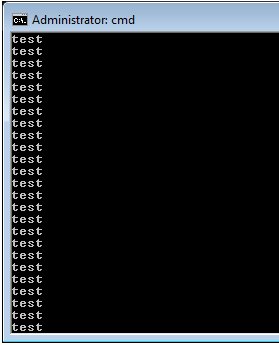
For example, here is a simple script that will print ’test’ continuously.
# simple script
def test():
print "test"
while 1:
test()
Now save this code in a text editor with the extention your_script_name.py.
The first line is a comment (text that isn’t executed) and can be created by using a # .
The second line is a function definition named test().
The third line is spaced 4 times and is the function body, which just prints ”test” to the command window.
The third line is where the code starts in a while loop, running the test() function.
To run this script, copy and paste the code into a file and save it with the extention .py. Now open a command line in the directory of your script and type:
python your_script_name.py
The window should see the word ’test’ screaming by.
To stop the program, hit Ctrl+c or close the window.
Installing a Python Module
At some point in your development, you will want to use a library or module that someone else has written. There is a simple process of installing Python modules. The first one we want to install is pyserial.
Download the tar.gz file and un-compress it to an accessible location. Open a command prompt in the location of the pyserial directory and send the command (use sudo if using linux):
python setup.py install
You should see a bunch of action in the command window and hopefully no errors. All this process is doing is moving some files into your main Python installation location, so that when you call the module in your script, Python knows where to find it. You can actually delete the module folder and tar.gz file when you are done, since the relevant source code was just copied to a location in your main Python directory. More information on how this works can be found here:
FYI, many Python modules can be found in Windows .exe installation packages that allow you to forgo the above steps for a ’one-click’ installation. A good resource for Windows binary files for 32-bit and 64-bit OS can be found here:
This example requires using an FTDI Basic or any other serial COM port device.
Simply, connect the TX pin to the RX pin with a wire to form a loopback. Anything that gets sent out of the serial port transmit pin gets bounced back to the receive pin. This test proves your serial device works and that you can send and receive data.
Now, plug your FTDI Basic into your computer and find your COM port number. We can see a list of available ports by typing this:
python -m serial.tools.list_ports
If you are using linux:
dmesg | grep tty
Note your COM port number.
Now download the piece of code below and open it in a text editor (make sure everything is tabbed in 4 space intervals!!):
import serial
#####Global Variables######################################
#be sure to declare the variable as 'global var' in the fxn
ser = 0
#####FUNCTIONS#############################################
#initialize serial connection
def init_serial():
COMNUM = 9 #set you COM port # here
global ser #must be declared in each fxn used
ser = serial.Serial()
ser.baudrate = 9600
ser.port = COMNUM - 1 #starts at 0, so subtract 1
#ser.port = '/dev/ttyUSB0' #uncomment for linux
#you must specify a timeout (in seconds) so that the
# serial port doesn't hang
ser.timeout = 1
ser.open() #open the serial port
# print port open or closed
if ser.isOpen():
print 'Open: ' + ser.portstr
#####SETUP################################################
#this is a good spot to run your initializations
init_serial()
#####MAIN LOOP############################################
while 1:
#prints what is sent in on the serial port
temp = raw_input('Type what you want to send, hit enter:\n\r')
ser.write(temp) #write to the serial port
bytes = ser.readline() #reads in bytes followed by a newline
print 'You sent: ' + bytes #print to the console
break #jump out of loop
#hit ctr-c to close python window
First thing you need to do before running this code is to change the COM port number to the one that is attached to your FTDI. The COMNUM variable in the first few lines is where you enter your COM port number. If you are running linux, read the comments above for ser.port.
Now, if you want to send data over the serial port, use:
ser.write(your_data)
your_data can be one byte or multiple bytes.
If you want to receive data over the serial port, use:
your_data = ser.readline()
The readline() function will read in a series of bytes terminated with a new line character (i.e. typing something then hitting enter on your keyboard). This works great with GPS, because each GPS NMEA sentence is terminated with a newline. For more information on how to use pyserial, look here.
You might realize that there are three communication channels being used:
ser.write – writes or transmitts data out of the serial port
ser.read – reads or receives data from the serial port
print – prints to the console window
Just be aware that ’print’ does not mean print out to the serial port, it prints to the console window.
Notice, we don’t define the type of variables (i.e. int i = 0). This is because Python treats all variables like strings, which makes parsing text/data very easy. If you need to make calculations, you will need to type cast your variables as floats. An example of this is in the GPS tracking section below.
Now try to run the script by typing (remember you need to be working out of the directory of the pythonGPS.py file):
python pythonGPS.py
This script will open a port and display the port number, then wait for you to enter a string followed by the enter key. If the loopback was successful, you should see what you sent and the program should end with a Python prompt >>>.
To close the window after successfully running, hit Ctrl + c.
Congratulations! You have just made yourself a very simple serial terminal program that can transmit and receive data!
Read a GPS and plot position with Python
Now that we know how to run a python script and open a serial port, there are many things you can do to create computer applications that communicate with embedded hardware. In this example, I am going to show you a program that reads GPS data over a serial port, saves the data to a txt file; then the data is read from the txt file, parsed, and plotted on a map.
There are a few steps that need to be followed in order for this program to work.Install the modules in the order below.
Install modules
Use the same module installation process as above or find an executable package.
The above process worked for me on my W7 machine, but I had to do some extra steps to get it to work on Ubuntu. Same might be said about Macs. With Ubuntu, you will need to completely clean your system of numpy, then build the source for numpy and matplotlib separately, so that you don’t mess up all of the dependencies. Here is the process I used for Ubuntu.
Once you have all of these modules installed without errors, you can download my project from github and run the program with a pre-loaded map and GPS NMEA data to see how it works:
Or you can proceed and create your own map and GPS NMEA data.
Select a map
Any map image will work, all you need to know are the bottom left and top right coordinates of the image. The map I used was a screen shot from Google Earth. I set placemarks at each corner and noted the latitude and longitude of each corner. Be sure to use decimal degrees coordinates.
Then I cropped the image around the two points using gimp. The more accurate you crop the image the more accurate your tracking will be. Save the image as ’map.png’ and keep it to the side for now.
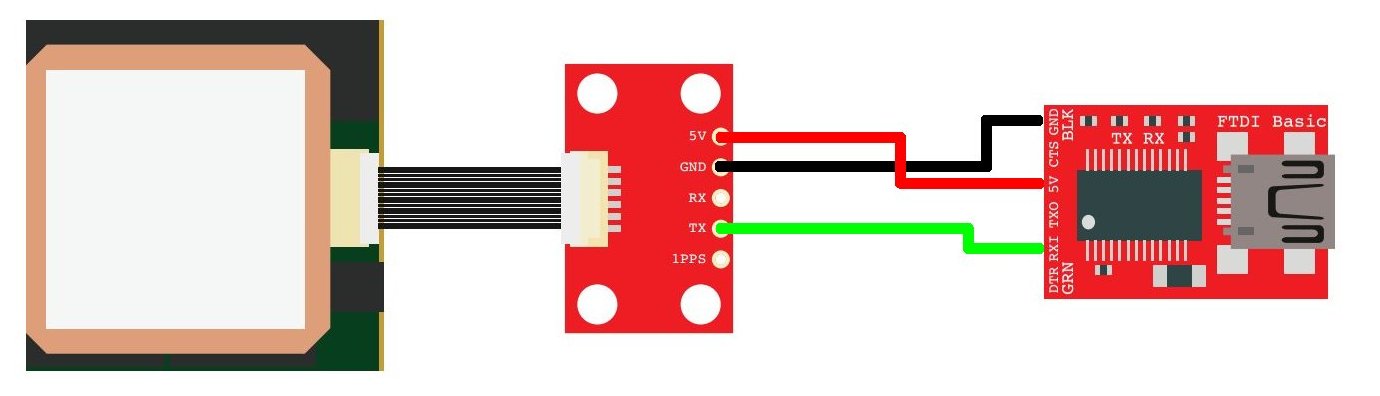
Hardware Setup
The hardware for this example includes a FTDI Basic and any NMEA capable GPS unit.
EM-406 GPS connected to a FTDI Basic
For the connections, all you need to do is power the GPS with the FTDI basic (3.3V or 5V and GND), then connect the TX pin of the GPS to the RX pin on the FTDI Basic.
It is probably best to allow the GPS to get a lock by leaving it powered for a few minutes before running the program. If the GPS doesn’t have a lock when you run the program, the maps will not be generated and you will see the raw NMEA data streaming in the console window. If you don’t have a GPS connected and you try to run the program, you will get out-of-bound errors from the parsing. You can verify your GPS is working correctly by opening a serial terminal program.
Save the python script into a folder and drop your map.png file along side maps.py. Here is what your program directory should look like if you have a GPS connected:
The nmea.txt file will automatically be created if you have your GPS connected. If you don’t have a GPS connected and you already have NMEA sentences to be displayed, create a file called ’nmea.txt’ and drop the data into the file.
Now open maps.py, we will need to edit some variables, so that your map image will scale correctly.
Edit these variables specific to the top right and bottom left corners of your map. Don’t forget to use decimal degree units!
#adjust these values based on your location and map, lat and long are in decimal degrees
TRX = -105.1621 #top right longitude
TRY = 40.0868 #top right latitude
BLX = -105.2898 #bottom left longitude
BLY = 40.0010 #bottom left latitude
Run the program by typing:
python gpsmap.py
The program starts by getting some information from the user.
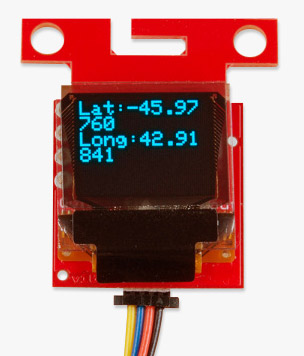
You will select to either run the program with a GPS device connected or you can load your own GPS NMEA sentences into a file called nmea.txt. Since you have your GPS connected, you will select your COM port and be presented with two mapping options: a position map…
…or an altitude map.
Once you open the serial port to your GPS, the nmea.txt file will automatically be created and raw GPS NMEA data, specifically GPGGA sentences, will be logged in a private thread. When you make a map selection, the nmea.txt file is copied into a file called temp.txt, which is parsed for latitude and longitude (or altitude). The temp.txt file is created to parse the data so that we don’t corrupt or happen to change the main nmea.txt log file.
The maps are generated in their own windows with options to save, zoom, and hover your mouse over points to get fine grain x,y coordinates.
Also, the maps don’t refresh automatically, so as your GPS logs data, you will need to close the map window and run the map generation commands to get new data. If you close the entire Python program, the logging to nmea.txt halts.
This program isn’t finished by any means. I found myself constantly wanting to add features and fix bugs. I binged on Python for a weekend, simply because there are so many modules to work with: GUI tools, interfacing to the web, etc. It is seriously addicting. If you have any modifications or suggestions, please feel free to leave them in the comments below. Thanks for reading!
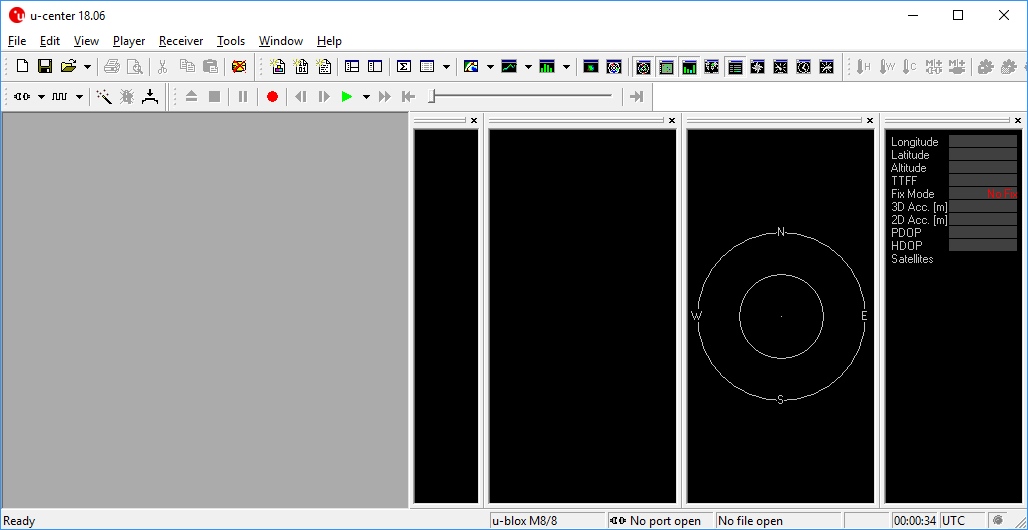
U-center from u-blox is a free software tool for configuring u-blox GPS receivers under Windows. U-center is a dense program with many interface elements. It can be overwhelming at first but over time it will become easier to use. For all its GUI weaknesses, it is very powerful for configuring the u-blox line of modules (such as the NEO-M8P-2 and SAM-M8Q to name a few). In this tutorial, we will be exploring some of its features with the NEO-M8P-2.
Required Software
The software can be obtained from u-blox. To follow along with this tutorial please download and install u-center. Once completed, open it.DOWNLOAD U-CENTER
Install Drivers
For this tutorial we’ll assume you have the SparkFun GPS-RTK but u-center can be used with any u-blox based product. Start by attaching a micro-B cable to the GPS-RTK board.
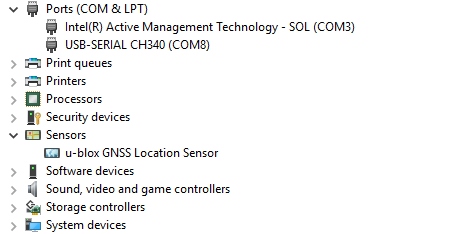
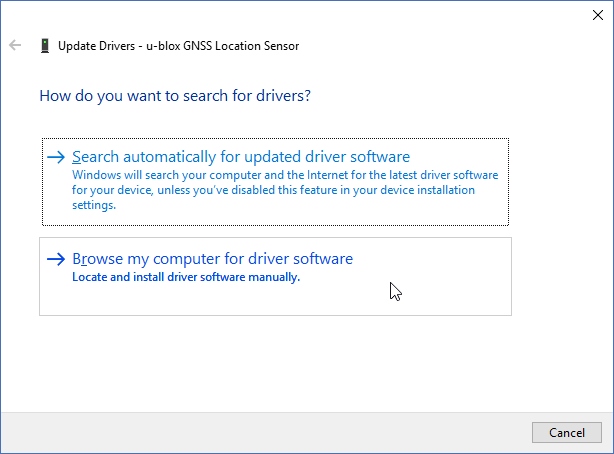
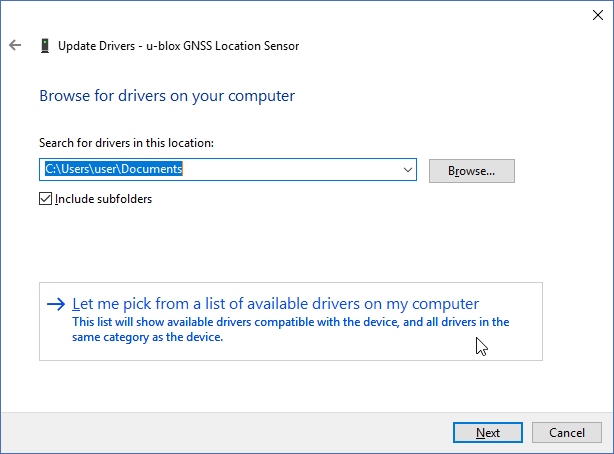
Now open Windows Device Manager. The NEO-M8 series has an annoying feature where the module comes up as a Windows Sensor rather than a serial device. If your u-blox receiver does not appear under COM ports then right click on the u-blox GNSS Location Sensor and then Update Driver. Next, click on Browse my computer for driver software.
Then “Let me pick”…
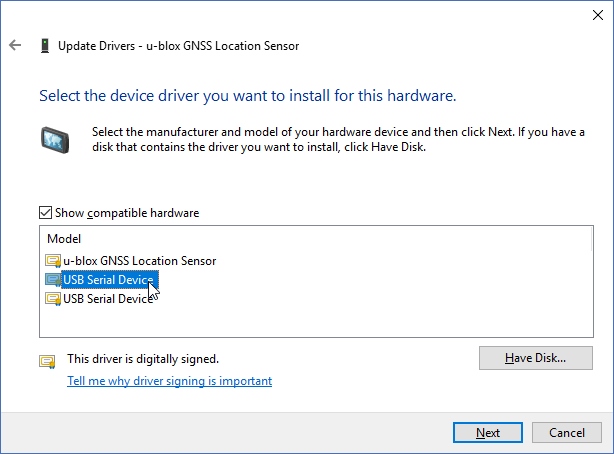
Select the first USB serial device.
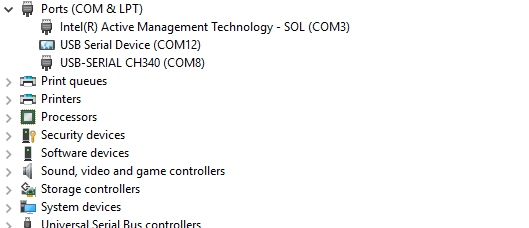
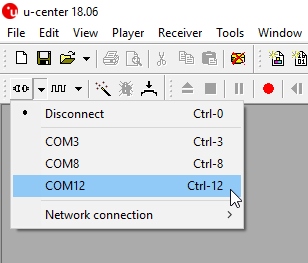
The SparkFun GPS-RTK board should now enumerate as a USB serial COM port. In the list below, the GPS-RTK board is COM12.
Return to u-center and drop down the port list. Select the COM port that is your RTK board. Congrats! You can now use u-center.
Configuring and Outputting NMEA Sentences
Let’s go over a few features you’ll likely use:
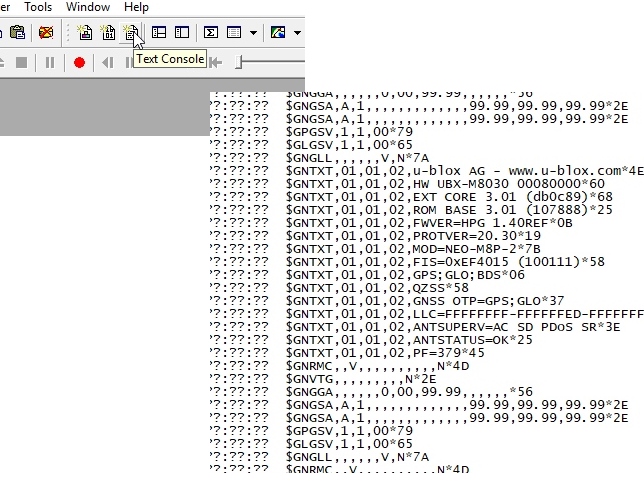
Text Console
The text console button will show you the raw NMEA sentences. This is handy for quickly inspecting the visible ASCII coming from the module over USB.
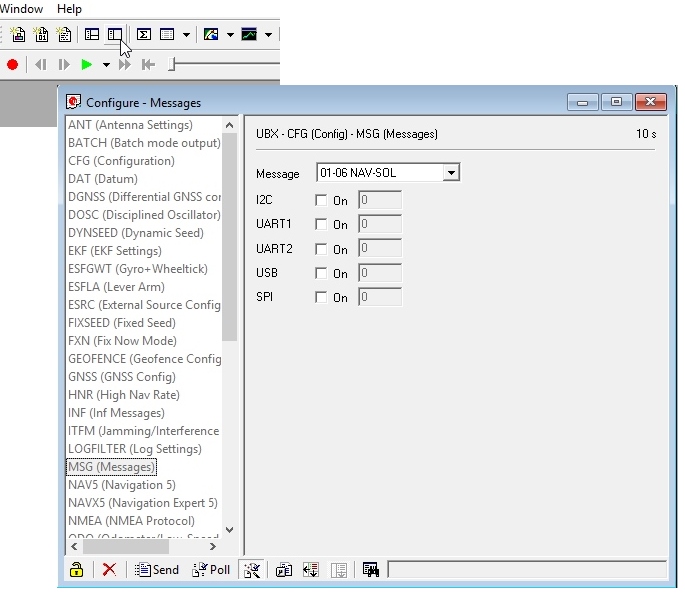
Configure
The configuration button opens the most powerful window. From this window you can inspect and configure new settings. It’s not obvious but when you click on a setting such as ‘MSG (Messages),’ u-center will poll the module for its current state. The ‘10s’ in the corner indicates how old the displayed information is. In this case it’s been 10 seconds since this setting was last queried. Click on the ‘Poll’ button to update the information. Go ahead and select the F0-00 NMEA GxGGA message. As you click the dropdown menu, the software will poll the current settings. It’s a bit disorienting at first but gets better over time.
The MSG configuration is very powerful. It allows you to enable or disable various NMEA sentences as well as binary protocols such as NAV-PVT (checkout the [full protocol datasheet](link text). Once a sentence is selected, such as GxGGA, the check boxes will be populated. If you want to disable the GxGGA sentence for the SPI interface, uncheck the SPI checkbox and then click ‘Send’. Congrats! The GxGGA sentence is no longer presented on the SPI interface. This raises an important fact:
Note: The NEO-M8 series has 4 interfaces: USB(serial), I2C, SPI, and UART. All interfaces can access information simultaneously. This means you can inspect configuration settings over the USB serial port while your Arduino makes setting changes over the I2C port. You can read NMEA sentences over the I2C port or send RTCM data into the module over SPI. It’s all highly configurable.
What is the USB Port on the NEO-M8P?
It’s like any other USB to serial device. It will enumerate on your computer as a COM port and acts as such. It is independent and separate from the UART port that is a dedicated TTL serial port.
If something is not accessible through u-center, it probably means that feature or setting is not compatible with the currently attached device. For example, the UART2 box is grayed out in the image above. The NEO-M8P does not have a second UART so you can’t address it.
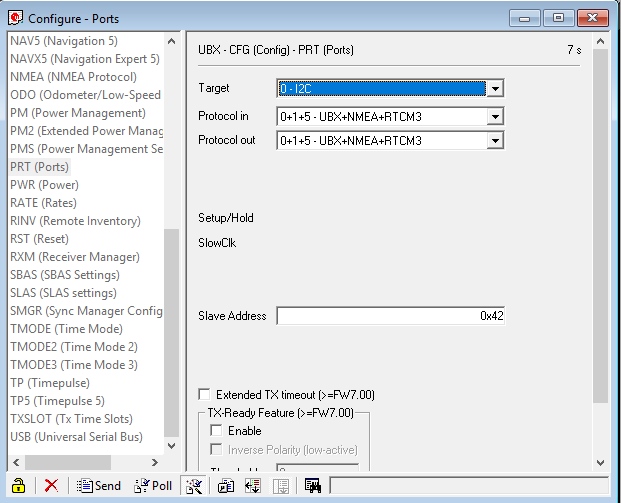
Ports
The Ports (PRT) sub-menu under Configuration is very helpful. You can do things like change the baud rate, I2C address, and protocols. Depending on your application, you may want to enable or disable entire interface protocols. For example, if you want to enable NMEA sentences for the SPI interface, you would do it here. Fortunately, the factory default for the NEO-M8P is good for I2C and UART1 for RTK purposes (input of RTCM3 is enabled for both ports).
This is also the menu that allows you to change the I2C address of your GPS-RTK. Because we are big fans of the Qwiic system, we’ll be using the GPS-RTK on the I2C bus. If we had another device on the bus that uses address 0x42 this menu will allow us to change the address of the GPS-RTK.
Poke around the various config menus. If you get your module into an unknown state you can unplug and replug to reset the settings.
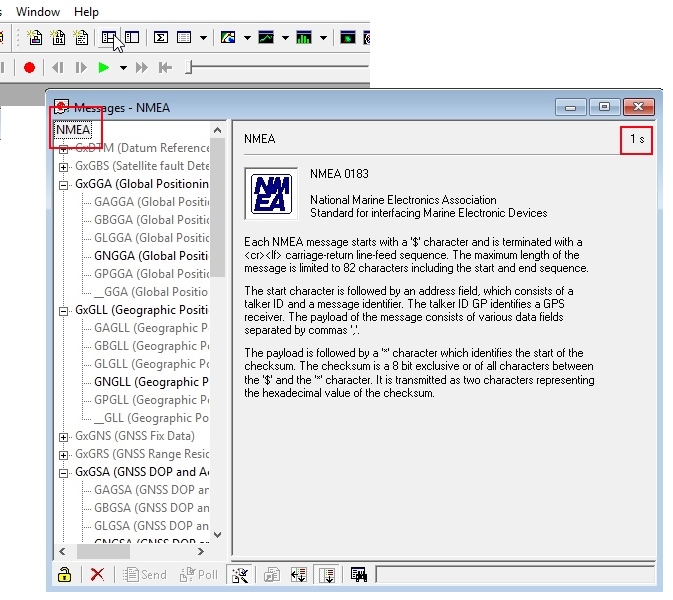
Messages
The messages window will allow you to view the various sentences reported by the module. It’s not obvious but if you double click on ‘NMEA’, the tree of messages will fold away. Similarly, if you double click on ‘UBX’, it will expand showing the various UBX sentences. By default, many of these are not enabled.
Resources and Going Further
Ready to get hands-on with GPS?
We’ve got a page just for you! We’ll walk you through the basics of how GPS works, the hardware needed, and project tutorials to get you started.
Once you’ve mastered U-Center you’re ready to begin configuring your Ublox module! Check out some of these related tutorials:Building an Autonomous Vehicle: The BatmobileDocumenting a six-month project to race autonomous Power Wheels at the SparkFun Autonomous Vehicle Competition (AVC) in 2016.GPS-RTK Hookup GuideFind out where you are! Use this easy hook-up guide to get up and running with the SparkFun high precision GPS-RTK board.GPS-RTK2 Hookup GuideGet precision down to the diameter of a dime with the new ZED-F9P from Ublox.
Från bildigenkänning till artificiell bildgenerering. AI-forskningen och utvecklingen inom maskininlärning (machine learning), när det handlar om bilder och foton, har i huvudsak handlat om artificiell bildigenkänning. Dvs att skapa algoritmer för att lära datorer att känna igen visuella objekt i bilder och tolka det som syns och sker i foton. (engelska: Image recognition, object detection, object classification)
De senaste åren har även AI:s förmåga att skapa (generera) falska fotorealistiska bilder tagit stora kliv framåt. På webbplatsen, ThisPersonDoesNotExist.com, kan du se själv med egna ögon hur långt utvecklingen kommit.
Dessa personer finns inte på riktigt. Ansiktena har skapats av AI-algoritmen StyleGAN på webbplatsen ThisPersonDoesNotExist.com
Webbplatsen är skapad av Phillip Wang, en fd programvaruingenjör vid Uber, och skapar automatiskt nya bilder på människors ansikten som inte finns på riktigt. Algoritmen bakom den bygger på forskning som släpptes förra året av grafikchipdesignern Nvidia. AI:t är tränat på ett enormt stort dataset med foton på riktiga människoansikten, och använder sedan en typ av neuralt nätverk som kallas ett Generativt Adversarialt Nätverk (engelska Generative Adversarial Network, GAN) för att tillverka nya falska människoporträtt.
”Varje gång du läser in webbsidan skapar nätverket en ny ansiktsbild från början,” skrev Wang i ett Facebook-inlägg. ”De flesta förstår inte hur bra AI:er kommer att vara på att syntetisera bilder i framtiden.”
Den underliggande AI-algoritmen som drivs på webbplatsen uppfanns ursprungligen av en forskare som heter Ian Goodfellow. Nvidias AI-algoritm, kallat StyleGAN, gjordes nyligen till öppen källkod och har visat sig vara otroligt flexibel. Även om den här versionen av modellen är tränad för att generera mänskliga ansikten, kan den i teorin användas för att efterlikna någon annan källa. Forskare experimenterar redan med andra mål, som t e x anime tecken, teckensnitt och graffiti.
På Our World in Data hittar du data med tabeller och över 3000 diagram inom nästan 300 olika områden. Allt är open source och fritt att använda. Ett perfekt ställe att gå till för att faktakolla hur saker och ting ser ut och förhåller sig i världen. Ypperlig källa för att källkritiskt granska påstående om t ex utsläpp, demografisk utveckling, politik, undervisning i olika länder m.m. Det finns även specifika sidor för lärare mer anpassat och paketerat material som kan användas direkt i undervisningen.
:max_bytes(150000):strip_icc():format(webp)/three-dimensional-model-of-polyvinyl-chloride-165874889-5c425ea7c9e77c000188be6d.jpg)