Skolverket har släppt en 2 minuters informationsfilm om entreprenörskap i skolan. Den sätter fingret på varför innovatörer, entreprenörer och tänka-utanför-boxare är så viktiga för samhället. Filmen vänder sig till huvudmän, rektorer och skolpersonal som är intresserade av att utveckla arbetet med entreprenörskap i skolan.
Entreprenörskap och innovation i skolan handlar om förhållningssätt och att skapa en grogrund för nyfikenhet och kreativitet.
Det handlar om förmågan att ta idé till handling. Om att gå från läroplan till aktivitet.
Det är skolans uppgift att ge eleverna möjlighet att utveckla sina kunskaper, öva upp sina förmågor att lösa problem, att pröva och ompröva en idé och att lära sig samarbeta.
Det är lärarnas uppgift att skapa en elevaktiv miljö där framtidens innovatörer får utrymme att växa. En plats där alla elevers initiativ uppmuntras, där de får träna, öva och utvecklas mot att möta arbetslivets krav på samarbetsförmåga, flexibilitet och att hantera frihet under ansvar.
Tänk om vi skulle sluta tänka OM…
Se filmen ovan (2 minuter) och svara sedan på frågan:
Varför är det viktig att du som elev får jobba med teknik, entreprenörskap och innovation i skolan? Vad behöver du lära dig och träna på i skolan, förutom rena ämneskunskaper, för att klara av framtidens arbetsliv?
De senaste åren har det skrivits mycket om att robotar tar människors jobb. Allt fler arbetsuppgifter ersätts av robotar, och fler står på tur i takt med att robotarna snabbt blir bättre och mer avancerade.
I robotiseringens och automatiseringens kölvatten skapas dock mängder av nya arbetstillfällen, främst inom teknikyrken som programmering, AI och mekatronik.
Här är dock ett intressant filmklipp från Japan som visar hur ett café erbjuder människor med funktionsnedsättningar arbetstillfällen som robotservitörer. Robotarna i caféet fjärrstyrs helt enkelt av människor som kan sitta eller ligga hemma och styra dem och interagera med caféets besökare. Mänsklig social interaktion och social integrering möjliggörs tack vara robotarna.
Robotar som ger människor jobb
Uppgifter och diskussionsfrågor
Vad tycker du om det du såg på filmen? Hur känner du inför en utveckling där allt fler mänskligt fjärrstyrda robotar interagerar med oss i offentliga miljöer som t ex caféer eller butiker?
Ge exempel på negativa saker med mänskligt fjärrstyrda robotar som interagerar med oss i offentliga miljöer.
Ge exempel på positiva saker med mänskligt fjärrstyrda robotar som interagerar med oss i offentliga miljöer.
Tycker du att denna typ av arbetsuppgift enbart ska utföras av människor med olika typer av funktionsnedsättningar? Eller bör det vara som vilken typ av jobb som helst att alla får konkurrera om jobben på lika villkor?
Skulle du hellre vilja bli serverad av en mänskligt fjärrstyrd servitörsrobot eller en autonom robot som styrs automatiskt av artificiell intelligens eller utifrån förprogrammerade instruktioner?
Hur tycker du att en servitörsrobot ska se ut? Ska den likna roboten i filmen? Ska den likna en människa mer? Tycker du att den ska se helt annorlunda ut och kanske vara mer anpassad för att hämta och lämna brickor eller tallrikar och glas? Beskriv, skissa och sök gärna efter inspiration på Internet.
Vilka egenskaper behöver en bra servitörsrobot ha? Vad ska den kunna göra? Beskriv funktionerna och hur den rent mekaniskt ska vara uppbyggd. Vilka funktioner behöver programmeras? Vilka funktioner behöver fjärrstyras? Hur kan man lösa de olika funktionerna rent tekniskt?
Skulle du kunna tänka dig att jobba med denna typ av teknologi själv? Hur då i så fall? Som den som styr roboten, som den som programmerar den eller som den som konstruerar och designar den här typen av robotar?
Ett stort problem inom skolans värld är att olika IT-system inte fungerar tillsammans eller att en massa information behöver läggas in flera gånger i olika system eftersom de inte automatiskt kan dela information mellan sig. Det beror oftast på att det saknas smarta och enhetliga sätt att definiera den information som systemen ska hantera eller hur kommunikationen mellan olika system ska ske. För att lösa sådana problem brukar man ta fram och sedan hålla sig till standarder. Nu har Sverige äntligen fått igång ett arbete som syftar till att definiera vilka IT-standarder som är av relevans för skolan.
Tillsammans med Skolverket, SIS, flera huvudmän och i samband med ett Vinnova-finansierat projekt om standarder för datadrivna processer, har Swedish Edtech Industry påbörjat ett arbete att ta fram en lista över de standarder och rekommendationer som finns och som är aktuella för att skapa ett säkert, effektivt, kvalitativt digitalt ekosystem för det svenska skolväsendet. En kort sammanfattande information om detta arbete och vad standarder innebär kan läsas nedan. Men för mer information och för löpande aktuell information om arbetet rekommenderas läsning direkt från ursprungskällan på Edtechkartan.se. Edtechkartan.se som lanserades hösten 2018 är en systemkarta över det svenska edtech-landskapet med inriktning på skolväsendet. Det är en interaktiv och lättanvänd digital systemkarta som löpande kommer att hållas uppdaterad. Kartan tar utgångspunkt i skolans och skolhuvudmannens verksamhetsprocesser och utifrån dessa verksamhetsområden mappas leverantörer in som idag har lösningar för att stödja processen. Det har hittills inte funnits en mer detaljerad bild över det komplexa digitala ekosystemet som utbildningssektorn utgör.
Interoperabilitet och it-standarder
Alla dessa standarder
Kravställ för interoperabilitet, kravställ standarder! En enkel uppmaning, men inte lika enkel att genomföra. Begreppet standard tolkas på olika sätt och det är viktigt att peka på vad vi menar och vad skillnaderna är. Det finns nationella och internationella standarder, det finns rekommendationer som i princip anses vara standarder men med olika “dialekter”(där rekommendationerna tolkas och används på olika sätt). Vi är alla överens om behovet av att etablera standarder, göra dem vedertagna för ett kvalitetssäkrat digitalt ekosystem, för ett ett säkert och effektivt informationsflöde, för interoperabilitet. Men om standarder inte beställs, så testas och implementeras de inte. Man ska också vara medveten om att standarder blir gamla och det finns risk för cementering av it-miljöerna. Alltså behöver vi alla hela tiden vara uppmärksamma, föra dialog och tillsammans se till att de standarder som finns är aktuella.
Det är också viktigt att inte blanda ihop vad som är en standard och vad som är en faktisk lösning. En standard beskriver och definierar. En lösning levererar (och det finns således alltid en leverantör bakom).
I december 2019 etablerades ett nationellt forum för arbetet med standarder: Forum för informationsstandardisering i skolväsendet. Ett forum Skolverket ansvarar för, i samverkan med olika aktörer, däribland Swedish Edtech Industry.
Vad är egentligen en “standard”?
En teknisk standard är en specifikation av ett format som tas fram, förvaltas och tillhandahålls av en standardiseringsorganisation, men en standard kan också vara en överenskommen definition av ett begrepp eller ord (klass, grupp o.s.v.). Standarder utvecklas vanligen genom frivilliga överenskommelser. Ett givet format kan vara erkänt av fler än en organisation och det finns format som inte erkänts av någon standardiseringsorganisation.
SIS, Svenska institutet för standarder, definierar begreppet standard så här:
En standard är en smart gemensam lösning på ett återkommande problem. Syftet med standarder är att skapa enhetliga och transparenta rutiner som vi kan enas kring.
Standarder kopplat till lärande, kommer ofta i paket med olika delar och är mer eller mindre heltäckande. Det finns olika organisationer som arbetar med olika former av “standardpaket”:
– ISO, International organization för standardization. Levererar internationella standarder, där delar kan användas och andra anpassas enligt lokala (nationella) behov inom specifika områden.
– SIS, Svenska institutet för standarder. Arbetar i tekniska kommittéer där standarder tas fram kopplat till olika områden, varav TK450 är en kommitté med fokus på standarder för it och lärande. I TK450 ingår flera olika arbetsgrupper där en arbetsgrupp t.ex. tagit fram SS12000, en annan EMIL (Education Information Markup Language). Speglar det internationella arbetet i ISO och gör nationella anpassningar.
– IMS Global Learning Consortium – levererar olika rekommendationer som sedan tolkas och anpassas. Ibland brukar man säga att IMS rekommendationer har olika “dialekter”. Ett exempel är IMS LTI (Learning Tools Interoperability), en “standard” (rekommendation) för anslutning av externa webbaserade lärresurser och innehåll till andra plattformar.
Stöd i arbetet: en lista med standarder
Tillsammans med Skolverket, SIS, flera huvudmän och i samband med ett Vinnovafinasierat projekt om standarder för datadrivna processer, har vi påbörjat en lista över de standarder och rekommendationer samt några relevanta informationsflöden som finns och som är aktuella för att skapa ett säkert, effektivt, kvalitativt digitalt ekosystem.
Denna listning har vi inom ramen för det här projektet gått igenom och mappat gentemot de olika områden och processer som finns definierade i edtechkartan. Vi har också gjort en ansats till att visa vilka standarder som aktuella respektive inaktuella, eftersom det är viktigt att inte fastna i äldre teknik eller i standarder som i sin tur kan bli cementerande.
I nedan länkat kalkylark finns listningen + områden & processer + definitioner och lite annat smått och gott som vi hoppas är till nytta i arbetet med kravställningar. Dokumentet ska ses som ett arbetsdokument, öppet för alla att kommentera i, så gör gärna det. Tillsammans kan vi göra det mer komplett och hålla det uppdaterat.
Bygg fågelholkar i träslöjden, och använd dem i undervisningen i fler ämnen!
Fågelholkar i träslöjden
Förutom att det är en bra slöjduppgift så kan man göra något spännande och intressant biologi- och teknikprojekt av det också. Eleverna kan sätta upp fågelholkarna runt skolan och förse dem med olika sensorer och kamera för att övervaka, logga och undersöka om och när det flyttar in fåglar i dem, samt lite annan information som temperatur, luftfuktighet och lufttryck. Man kan t ex använda sig av Micro:bit eller Raspberry Pi med lämpliga sensorer till (t ex envirobit från Pimoroni eller Enviro till Raspberry Pi). Det data som loggas kan även användas i matematikundervisningen för att sammanställa till tabeller, olika typer av diagram och grafer och för att beräkna medelvärden m.m.
Här är en lista på fåglar som häckar i holkar och kan tänkas bygga bo i en observationsholk:
Vanligast: Talgoxe Behöver hål med minst 32 mm diameter. På vintern används holkarna som vindskydd när talgoxarna ska sova.
Nötväcka Behöver ca 30 mm diameter men använder helst holkar med 50 mm hål som den då murar igen till lagom storlek. Bottenytans kant bör vara 15 cm.
Göktyta Behöver 32 mm diameter. Ganska sällsynt. Vill ha mycket djup holk (40 cm mellan hål och botten).
Talltita Behöver 30 mm diameter. Bara i eller nära barrskog. Svår att få att häcka i holk. Den vill hacka ut bohålet själv. Fyll holken med sågspån upp till ingångshålet så kan fåglarna tömma den och sedan bygga sitt bo.
Svartmes Behöver 28 mm diameter. Bara i eller nära barrskog. Vill ha en holk nära marken, helst i knähöjd.
Tofsmes Behöver 28 mm diameter. Bara i eller nära barrskog.
Lappmes Behöver 30 mm diameter. Bara i eller nära barrskog med inslag av björk och endast i nordligaste Sverige.
Tornsvala (tornseglare) Behöver 45 mm diameter. Ganska svår att få att häcka i holk. Häckar i vanliga holkar mest i norra Sverige. Helst ska holken i så fall sättas upp liggande, men specialholkar kan också användas. Viktigast är att holkarna placeras högt så att fåglarna kan låta sig falla en bit för att få luft under vingarna vid utflygningen. Det får inte heller finnas trädgrenar eller andra hinder framför ingångshålen.
Trädkrypare Bara i eller nära skog. Behöver speciell holk av tjärpapp eller trä med smalt springformat ingångshål på sidan. Springan skall vara 25—30 mm bred och 50—100 mm lång.
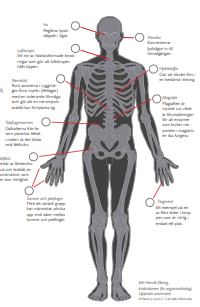
Tänk vad människokroppen är fantastisk! Den är uppbyggd av massor av celler som tillsammans bildar vävnader som i sin tur bygger upp kroppens organ, smart konstruerade för att fungera optimalt på rätt ställe. I vår vardagsmiljö finns föremål och produkter konstruerade med liknande tekniska lösningar som finns i kroppen.
Kan du lista ut var i människokroppen följande tekniska lösningar återfinns? Para ihop rätt siffra med rätt del i kroppen i arbetsbladet i länken nedan. Skriv in siffrorna och dina svar i din loggbok för teknik.
I somras hörde en journalist från UR av sig med frågor gällande programmering i skolan. En vecka i början av september fick jag och mina elever på Getingeskolan ett trevligt besök under en tekniklektion. I bifogad länk nedan går det nu i efterhand att lyssna på radioprogrammet.
I reportaget finns en hel del bra tips till lärare, skolledare och huvudmän!
Sedan hösten 2018 ska alla skolor undervisa i programmering. Inför omställningen fanns en oro att skolorna inte skulle hinna med att fortbilda sina lärare. Det fanns också en osäkerhet kring hur undervisningen i programmering egentligen skulle gå till. Så hur ser det ut ett år efter införandet av programmering på schemat? Vad är det eleverna får? Och har lärarna hunnit lära sig det de ska lära ut?
Läsårets första design- och konstruktionsprojekt i kurserna Design 1, Konstruktion 1 och CAD 1 för våra teknikelever på Innovationsgymnasiet i Helsingborg blev ett ämnesövergripande produktutvecklingsprojekt som går ut på att utveckla käpphästhopphinder, eller s k minihinder, som grundskoleelever i mellanstadiet ska kunna tillverka och bygga i trä-/metallslöjden. Tanken är sedan att dessa hopphinder ska användas av elever från förskoleklass upp till årskurs 6 på de olika skolornas skolgårdar på fritids och under raster.
Projektet involverar många viktiga moment och aspekter från en produktutvecklings alla faser och processteg, från idé till färdig produkt. Mer info om projektet kommer publiceras här löpande.
Den här inspirationsfilmen från ”Minihinder Equipe” visar exempel på hur dessa minihinder kan se ut och hur de används.
Skapa en egen robot baserat på t ex en mBot wifi, Velleman Allbot Four Legged Robot, eller Pi2Go.
Det finns många olika byggsatser att köpa om du vill bygga en egen programmerbar robot eller en robotbil. Ett chassi till ett fordon är en ram, stomme eller bottenplatta med tillhörande hjul, hjulupphängning och motorer. För att få önskad funktion på din robot behöver du komplettera chassit med motordrivkretsar, styrelektronik och strömförsörjning. Det finns en hel del att ta hänsyn till när du ska välja vilka komponenter din robot ska bestå av. Enklast är att välja något som andra redan testat, så att du vet att delarna fungerar ihop och kan hitta instruktioner för hur man bygger ihop allt.
Här nedan visar vi ett antal exempel på byggsatser med chassi, motorer och hjul samt några lite mer kompletta lösningar där även alla elektronik-komponenter medföljer. När du har ett färdigt chassi kan du designa och bygga en egen kaross eller hölje till det. Varför inte t ex göra så att det ser ut som ett djur? Du kan givetvis även konstruera och bygga ett helt eget chassi som liknar något av dessa i valfritt material (t ex trä, plast, kartong eller metall). För att spara pengar och skona miljön kanske du kan hitta och använda något lämpligt återbruksmaterial? (Skolans läromedelsbudget är ju begränsad). Du skulle kunna göra det som ett riktigt bra ämnesövergripande skolprojekt som handlar om hållbar utveckling, uppfinningar, konstruktion, design, elektronik, mekanik, ekonomi, kommunikation, samarbete, materialkunskap, verktyg och bearbetning, skisser och ritningar, 3D-CAD och 3D-printing och programmering. Inte bara för att det är väldigt lärorikt, utan även för att det är kreativt, utmanande och kul! Skolämnen som berörs är i huvudsak teknik, bild och slöjd, men även matematik, fysik, samhällskunskap, hem- och konsumentkunskap, svenska, engelska och kemi.
Här är ett antal exempel på färdiga robot-kit:
Mini Robot Rover Chassis Kit
Mini Robot Rover Chassis Kit
Kit för att bygga en egen robot med två hjul. Innehåller chassi, motorer och hjul. Komplettera med motordrivning, en Arduino eller Micro:bit och strömförsörjning. Innehåll: 2 DC-motorer (4-6 V) med hjul, stödhjul, metallchassi och topplatta för tillbehör. Mått monterad: 103x74x156 mm. Pris ca 250:- på Kjell & Co
Robotbyggsats med hjul och motor
Robotbyggsats med hjul och motor
Kit för att bygga en egen robot med två hjul. Innehåller chassi, motorer och hjul. Komplettera med motordrivning, en Arduino eller Micro:bit och strömförsörjning. Gör roboten smart med t.ex. optisk linjespårning (87064) eller avståndsmätning (87059). Chassit har hål för montering med skruv. Spänning motorer: 5 – 10 V.
En liten buggy som enkelt monteras med bara en skruvmejsel, ingen lödning krävs.
Innehåll Robo:Bit robotik-kontroller (kretskort) monteringsdetaljer (batterihållare, skruv, distanser, osv) 2 gula hjul med däck 2 motorer med anslutningskabel (ingen lödning) notera att micro:bit inte ingår!
Med den här byggsatsen kan man lära sig om att: Styra motorer med enkla fram/bak-kommandon. Styra motorernas hastighet i båda riktningarna med PWM. Med hjälp av en till micro:bit radiostyra buggyn. Använda rörelsesensorn hos micro:bit för att detektera krockar med hinder och undvika dem. Priset för detta kit är ca 480:- på Electrokit
Med en ultraljudsavståndsmätare (ingår ej) även: Upptäcka hinder när de kommer nära och undvika dem ”följa John”-program som försöker hålla ett konstant avstånd till föremål
Med en linjeföljare (ingår ej) även:
Använda linjesensorerna för att få buggyn att hålla sig i ”spåret” Skriva mer komplicerade program för när roboten stöter på korsningar av olika slag Jämföra olika strategier för att följa linjer Tillsammans med ultraljudsavståndsmätaren kan du få roboten att undvika hinder på banan och, efter att ha rundat den, upptäcka den igen.
Robo:Bit Buggy MK2 delar Robo:Bit Buggy MK2 ihopmonterad inklusive ultraljudsdetektorer
Olimex Robotplattform 3 hjul
Olimex Robotplattform 3 hjul monterad
Olimex Robotplattform 3 hjul är en robotbyggsats med chassie, motorer, hjul och batterihållare. Chassiet består av en 3mm akrylplastskiva med en mängd fästpunkter för motorer, sensorer och övrig elektronik. Byggsatsen innehåller två utväxlade DC-motorer som skruvas fast i chassiet och två hjul med gummidäck som enkelt trycks fast direkt på motoraxlarna. Utöver de två drivhjulen medföljer även en stödkula som följer rörelser i alla riktningar samt en batterihållare för 4st AA-batterier. Komplettera med valfri mikrokontroller, motordrivare samt sensorer och du har en komplett autonom robot!
Innehåll: * 1st chassie * 2st motorer * 2st hjul 65 x 25mm * 1st stödkula * 2st monteringssatser för motor * 1st batterihållare 4xAA Pris för detta kit är ca 280:- på Electrokit
Olimex Robotplattform 3 hjul delar
AlphaBot2 – Robot kit för Raspberry Pi
AlphaBot2 – Robot kit för Raspberry Pi
AlphaBot2 är en robotbyggsats gjord för Raspberry Pi Zero/Zero W, och klarar bland annat av att följa en linje, undvika föremål, mäta avstånd med ultraljud, kommunicera över Bluetooth/IR/WiFi (Bluetooth och WiFi kräver Pi Zero W) och har en inbyggd kamera som gåra att vinkla i höjdled. Monteringen är enkelt avklarad utan någon lödning eller kabeldragning; det är klart på några minuter och det finns gott om exempelkod för att komma igång snabbt.
Funktioner: * 5-kanals infraröd sensor, med analog utgång och PID-algorithm för stabil linjeföljning * Moduler för linjeföljning och för att undvika hinder, utan kabeldragning * TB6612FNG dubbel H-brygga motordrivare * N20 minimotor med metallkugghjul i växellådan. * Inbyggda RGB LEDs
På det övre kortet finns: * LM2596 spänningsregulator, levererar stabil ström (5V) till Raspberry Pi Zero * TLC1543 10 bitars AD-omvandlare, för integration med analoga givare och sensorer * PCA9685 servocontroller för jämn rörelse av kameraservot * CP2102 UART-konverterare, för att styra Pi över UART * USB HUB chip, så du kan använda fler USB-anslutningar (fyra stycken) * En summer * IR-mottagare
Mått: 220 x 165 x 70mm
Innehåll: AlphaBot2-PiZero (adapterkort) AlphaBot2-Base (chassi) RPi Camera (B) Ultraljudssensor Micro SD kort 16GB SG90 servo 2 DOF pan and tilt kit IR fjärrkontroll FC-20P kabel 8cm Micro USB-kontakt RPi Zero V1.3 Camerasladd 30cm USB-kabel typ A hane till microB hane AlphaBot2-PiZero skruvar skruvmejsel Pris ca 1200:- på Electrokit
Rover 5 Robotplattform
Rover 5 Robotplattform
Rover 5 är en robotplattform av modell stridsvagn (tank) och använder 4 individuellt oberoende motorer, var och en med en halleffekt-kvadraturkodare och växellåda. Hela växellådsaggregatet kan roteras i steg om 5 grader för olika markfrigångskonfigurationer. Du kan även byta ut robotens larvfötter mot traditionella hjul.
Funktioner:
Justerbara växellådsvinklar 4 oberoende likströmsmotorer 4 oberoende hall-effektkodare Tjocka gummitankar 6x AA batterihållare 10 kg / cm stallmoment per motor Pris ca 800:- på Elektrokit
mBot Blue/Wifi från Makeblock
mBot Blue från Makeblock
mBot Blue och mBot wifi från Makeblock är robotbyggsatser speciellt framtagna för barn och utbildning. Roboten monteras enkelt ihop, ingen lödning krävs, och programmeras i Arduino eller Scratch. En modul för 2.4GHz eller Bluetooth kommunikation medföljer och kan användas för att styra roboten trådlöst från en dator eller mobil. App för iPhone och Android finns gratis i Appstore och Google Play, sök efter namnet mBot. Det medföljer även en IR-fjärrkontroll som redan från start kan användas för att styra roboten manuellt. Med i paketet finns alla mekaniska delar som behövs för att bygga ihop roboten, styrkort, hjul och motorer, ultraljudssensor, linjeföljarsensor, kablar, batterihållare, fjärrkontroll samt skruvmejslar.
mBot är en komplett lösning för elever som vill lära sig mer om programmering, elektronik och robotar. Att arbeta med mBlock, inspirerad av Scratch 2.0 och kontrollerad av en Bluetooth-modul ger detta robotkit elever en oändlig massa möjligheter att lära sig vetenskap, teknologi, ingenjörskunskap och matematk.
Dra och släpp grafiskt programmeringsmjukvara som baseras på Scratch 2.0 ger barnen ett snabbt sätt att lära sig programmering, att kontrollera roboten, och att möjliggöra multipla funktioner från roboten. mBot bygger på lek och kreativitet.
Den mekaniska aluminiumkroppen av mBot är kompatibel med Makeblock plattformen och många Legodelar, medan elektroniken är utvecklad med Arduinos open source ekosystem. Detta gör att mBot har en nästan oändlig utökningsmöjlighet genom att använda många olika elektroniska moduler som du kan behöva för att bygga din ”drömrobot”.
• Mjukvara och programmering: mBlock (Grafisk) för Mac och Windows, iPad mBlocky, Arduino IDE • Microcontroller: Baserad på Arduino Uno • Strömförsörjning: 3,7V DC Lithium batteri eller fyra 1,5V AA batterier (säljes separat) • Trådlös kommunikation: Bluetooth eller 2,4 GHz wifi
I paketet ingår:2x Micro TT motor 1x Universal hjul 1x Me Ultraljud sensor 1x mCore 15x M4 x8 skruvar 1xME Line follower 2x Tyre 90T B 8x M3 muttrar 2x Velcro 4x M2.2 x 9.5 skruvar 1x Line follower map 4x M2 x 25 2x 6P6C RJ25-kablar 0,2m 1x IR fjärrkontroll (Knappcellsbatteri CR2025, medföljer ej) 1x Chassi 1x USB Typ A – Typ B kabel 1m 1x Batterihållare för 4 AA-batterier (batterier medföljer ej) 1x skruvmejsel 1x Skyddslock Mått(BxDxH): 170x130x90mm Längd 17 cm Fyra AA batterier köps separat 1 st knappcellsbatteri CR2025 köps separat Priser från ca 900:- beroende på modell och kan köpas från t ex Hands On Science
mBot Blue och mBot wifi kan programmeras med ScratchmBot Blue från Makeblock i delarmBot Wifi monteras enkelt ihop till en komplett fungerande robotmBot Blue kan styrs från en mobiltelefon
mBot Ranger Robot kit från Makeblock
mBot Ranger Robot Kit från Makeblock
mbot Ranger Robot Kit är ett 3-i-1 robotkit som stöder tre byggutföranden: Off-Road Land Raider, två-hjulig självbalanserande bil och Dashing Raptor, Predator.
Programmera och kontrollera mbot Ranger via smartphone, surfplatta, Mac eller PC. Trådlös komunikation via Bluetooth och WiFi 2,4G.
mBot Ranger är fullt kompatibel med mBlock som är en grafisk programmeringsmiljö baserad på Scratch 2.0 open-source kod. Den gör programmeringsprojekt och interaktiva projekt enklare genom drag-and-drop funktionsblock. Utöver stöd för programmering via en PC har mBot Ranger även stöd för att bli programmerad från en iPad och andra surfplattor med en enkelanvänd app: Makeblock HD.
Programmering: PC – mBlock iPad/Tablet – Makeblock Arduino IDE
Bil med kraftöverföring via remdrift i serien Bilar och kraftöverföring.
Byggsatsen innehåller chassi av korrugerad plast, hjul, axlar och axelbockar med monteringskuddar, 2 remskivor, gummiband, elmotor, batterihållare och omkopplare.
Storlek 20x14cm. Batteri 2 st AA beställs separat. Pris ca 80:- på Hands On Science
Enkla byggsatser där ni jämför effekten av olika kraftöverföringar från energikälla till rörelseenergi. Här är utväxling gjord med remskivor av olika diameter.
Remdrivning i fordon finns i lite olika varianter. I riktiga personbilar används det mest till att driva generatorn, vattenpumpen, AC-kompressorn, kylarfläkten eller servostyrningspumpen från bilens förbränningsmotor. Det finns dock några klassiska gamla exempel på bilar som hade remdrivning som kraftöverföring för att driva hjulen som t ex Daf/Volvo 343, även kallad Remjohan. Vissa veteranmopeder hade kraftöverföring med en rem för länge sedan, men sedan blev det i princip standard med kedja på både mopeder och motorcyklar. Idag har remdrift blivit vanligare igen på Scooter-mopeder bl a pga ryckfri och behaglig gång samt möjlighet att justera utväxlingen dynamiskt i den automatiska växellådan mha en variator. Andra remdrivna produkter är kvarnar, luftkompressorer och kapsågar.
Bilchassi med kugghjulsdrift
Bilchassi med kugghjulsdrift som kraftöverföring
Byggsatsen innehåller chassi av korrugerad plast, hjul, axlar och axelbockar med monteringskuddar, 2 kugghjul, elmotor, batterihållare och omkopplare.
Storlek 20x14cm. Batteri 2 st AA beställs separat. Pris ca 80:- på Hands On Science
Enkla byggsatser där ni jämför effekten av olika kraftöverföringar från energikälla till rörelseenergi. Mellan drivkälla och hjul finns i allmänhet en växellåda med flera kugghjul.
Kugghjulsdrivna fordon är våra vanliga standardbilar, lastbilar och mopeder, cyklar traktorer samt även i borrmaskiner.