Samhällsbyggnadssektorn är en av de sista branscherna på digitaliseringsbollen. Men nu börjar det röra på sig och traditionella tekniska kompetenser såsom ingenjörer och konstruktörer behöver utvecklas för att passa ett digitaliserat arbetsliv. För digitalisering handlar mer om kultur och ledarskap än just teknik.
Hur väl rustade är byggbranschen inför de nya kompetensbehoven? Det var knäckfrågan på Nordic Contech Talks andra webbinar den 27 augusti, som samlade flera branschföreträdare för att diskutera branschens nuläge och framtid.
Webbinaret inleddes med en framtidsblick där Erik Herngren, Senior Partner på Kairos Future, målade upp morgondagens utmaningar och möjligheter. Han pratade om en fygital framtid där det fysiska och digitala möts i arbetslivet. Och där förmågan att ständigt kunna hantera nya situationer och osäkerhet kommer att vara en framgångsfaktor.
– Digitaliseringen är egentligen inte en teknikfråga utan en kulturfråga. Det handlar främst om hur företagen kan förändra sin egen organisation och arbetsprocess för att lyckas bättre.
Erik Herngren uppmanade branschen att våga bejaka AI-utvecklingen som sker inom alltfler områden. För AI kommer att vara en central del i att skapa effektivare processer och bättre intern kommunikation på företagen, menade han.
– Men i takt med att AI tar över vissa arbetsmoment, kommer samtidigt kompetenskraven för befintliga byggyrken att höjas. Tidigare handlade exempelvis installatörsyrket om att dra kabel. Nu krävs det också att du ska kunna konfigurera system och interagera med kunder. Arbetsrollerna blir mer multikomplexa och urvalet av lämpliga kandidater blir därmed mindre.
Livslångt lärande
Yrkeshögskolorna spelar en viktig roll för kompetensförsörjningen till byggsektorn och där blir digitaliseringen en allt viktigare del i utbildningarna, berättar Jenny Sörby som är kommunikationschef på Myndigheten för yrkeshögskolan.
– Den digitala insikten i branschen börjar alltmer speglas i utbildningarnas titlar och byggföretagen har en jättestor möjlighet att utforma de här utbildningarna enligt deras kompetensönskemål, menar Jenny Sörby.
Numera erbjuder yrkeshögskolan även kortare utbildningar på mellan 6 veckor och 6 månader, med flexibla koncept så att yrkesverksamma kan kombinera studier och jobb.
– Att redan yrkesverksamma på detta sätt ges möjlighet att spetsa sin kompetens är mycket betydelsefullt. Det livslånga lärande slår verkligen igenom i och med digitaliseringen.
Branschen behöver nya talanger
Under webbinarets andra del fick fyra representanter från byggsektorn ge sin syn på branschens kompetensförsörjning under ledning av programledaren Fredrik Bauer. Det konstaterades bland annat att branschen måste bli bättre på att locka nya talanger som kanske inte har en traditionell byggbakgrund.
– Vi behöver se över våra kompetenskrav när vi söker ny personal för att få in medarbetare med andra förmågor. Vi har till exempel precis anställt en före detta spelutvecklare till Skanska, berättade Anna Wenner, HR-direktör på Skanska Sverige.
Hon ansåg också att byggsektorn behöver bli bättre på att behålla och utveckla medarbetarna. Samt att titta på hur andra branscher har hanterat omställningen till det digitala för att hämta inspiration därifrån.
Tobias Andersson, koncernchef på Sveab, var även han inne på att branschen behöver bli bättre på att locka nya typer av talanger och betonade nödvändigheten i att medarbetarna är nyfikna och ständigt vill utveckla sig själva och sina kollegor.
– Vi går också mot mer specialiserade yrkesroller där gränsen mellan tjänstemän och yrkesarbetare alltmer kommer att suddas ut, menade han.
Inte tillräckliga incitament
Men hur kommer det sig då att just byggbranschen är den sektor som är minst digitaliserad? Petter Bengtsson, CEO på Zynka BIM, lyfte problemet med den långsamma produktivitetsökningen i byggsektorn:
– Idag finns inte tillräckliga incitament att jobba snabbare. Där måste vi börja prata mer om total cost of ownership – det vill säga, vad kostar en byggnad under hela dess livscykel?
Petter Bengtsson menade också att branschen behöver bli bättre på att planera och bygga digitalt innan man sätter spaden i backen.
– Jag ser framför mig att byggplatsen blir mer av en montageplats, med stort inslag av industrialiserat byggande.
Térèse Kuldkepp, energi- och hållbarhetsstrateg på Incoord, framhöll att byggsektorn behöver bli bättre på att arbeta mellan organisationer och bryta gamla affärskulturer för att kunna uppmuntra till nytänkande.
– Jag hoppas också att en större mångfald i branschen och andra perspektiv kring kompetens ska lyfta sektorn i framtiden.
AI servar kunden
Finansbranschen har på senare år genomgått en stor förändring i och med digitaliseringen vilket radikalt har förändrat dess arbetsprocesser. Sara Öhrvall som är Chief Digital, Customer Experience and Communication officer på SEB, gav exempel på den AI-resa som hennes egen arbetsplats gått igenom. Till exempel kan upp till 90 % av inkommande kundsamtal få svar av deras AI-bot Aida, vilket medför att medarbetarna på kundtjänst kan koncentrera sig på mer kvalificerade samtal.
– Effekterna av de här AI-systemen har vi nog bara börjat nosa på. Det viktiga i det här läget är att vi ser till att våra medarbetare blir riktigt duktiga på att arbeta med systemen, så att vi får ut den fulla potentialen av dem, konstaterade hon.
Kombinera jobb och utbildning
Webbinaret avslutades med reflektioner från två av arrangörerna, nämligen Camilla Byström, programchef för InfraSweden2030 och Pär Lundström, Expert inom kompetensförsörjning på Installatörsföretagen. Pär Lundström lyfte behovet av en flexibel utbildning:
– Jag skulle gärna se en större möjlighet att anställa folk som inte har någon tidigare erfarenhet av byggsektorn och ge dem en chans att kombinera lärande på arbetsplatsen med vuxenutbildning. Då kanske det behöver införas någon typ av kompetensavdrag för att företagen ska våga satsa.
Camilla Byström framhöll att ett skifte i just byggbranschen inte är det lättaste eftersom det som byggs behöver ha en mycket lång livslängd.
– Det gör det lite svårt att våga prova nya metoder eller nya sätt att handla upp. Men enda vägen framåt är att våga testa – inte minst med tanke på de nya klimatmålen som gör det omöjligt att fortsätta på samma sätt som tidigare.
Webbinaret anordnades av Svensk Byggtjänst och Smart Built Environment tillsammans med Infra Sweden 2030, Byggföretagen och Installatörsföretagen. Nästa Nordic ConTech Talk hålls den 8 oktober.
Som lärare har du kostnadsfri tillgång till utbildningspaketet från Svensk Byggtjänst. För att få tillgång till utbildningspaketet kontakta Susanne Nyberg – susanne.nyberg@byggtjanst.se
Vill du veta mer om utbildningspaketet?
Har du frågor om till exempel vad som ingår i paketet, för vilket skede i byggprocessen de olika webbtjänsterna passar bäst eller frågor om aktiveringslänk, användarkonto eller inloggning, kontakta gärna Susanne Nyberg – susanne.nyberg@byggtjanst.se
De senaste åren har det skrivits mycket om att robotar tar människors jobb. Allt fler arbetsuppgifter ersätts av robotar, och fler står på tur i takt med att robotarna snabbt blir bättre och mer avancerade.
I robotiseringens och automatiseringens kölvatten skapas dock mängder av nya arbetstillfällen, främst inom teknikyrken som programmering, AI och mekatronik.
Här är dock ett intressant filmklipp från Japan som visar hur ett café erbjuder människor med funktionsnedsättningar arbetstillfällen som robotservitörer. Robotarna i caféet fjärrstyrs helt enkelt av människor som kan sitta eller ligga hemma och styra dem och interagera med caféets besökare. Mänsklig social interaktion och social integrering möjliggörs tack vara robotarna.
Robotar som ger människor jobb
Uppgifter och diskussionsfrågor
Vad tycker du om det du såg på filmen? Hur känner du inför en utveckling där allt fler mänskligt fjärrstyrda robotar interagerar med oss i offentliga miljöer som t ex caféer eller butiker?
Ge exempel på negativa saker med mänskligt fjärrstyrda robotar som interagerar med oss i offentliga miljöer.
Ge exempel på positiva saker med mänskligt fjärrstyrda robotar som interagerar med oss i offentliga miljöer.
Tycker du att denna typ av arbetsuppgift enbart ska utföras av människor med olika typer av funktionsnedsättningar? Eller bör det vara som vilken typ av jobb som helst att alla får konkurrera om jobben på lika villkor?
Skulle du hellre vilja bli serverad av en mänskligt fjärrstyrd servitörsrobot eller en autonom robot som styrs automatiskt av artificiell intelligens eller utifrån förprogrammerade instruktioner?
Hur tycker du att en servitörsrobot ska se ut? Ska den likna roboten i filmen? Ska den likna en människa mer? Tycker du att den ska se helt annorlunda ut och kanske vara mer anpassad för att hämta och lämna brickor eller tallrikar och glas? Beskriv, skissa och sök gärna efter inspiration på Internet.
Vilka egenskaper behöver en bra servitörsrobot ha? Vad ska den kunna göra? Beskriv funktionerna och hur den rent mekaniskt ska vara uppbyggd. Vilka funktioner behöver programmeras? Vilka funktioner behöver fjärrstyras? Hur kan man lösa de olika funktionerna rent tekniskt?
Skulle du kunna tänka dig att jobba med denna typ av teknologi själv? Hur då i så fall? Som den som styr roboten, som den som programmerar den eller som den som konstruerar och designar den här typen av robotar?
Skulle du vilja träffa en avliden person som du älskar igen, i en virtuell värld? 2016 dog Jang Ji-sungs sju år gamla dotter Nayeon av en obotlig sjukdom. Tre år senare återförenades den sydkoreanska mamman med Nayeon, i en virtuell värld skapad för en TV-dokumentär.
I nedanstående Youtube-film har Munhwa Broadcasting Corporation delat sekvenser från den speciella dokumentären, med titeln ”Jag träffade dig”, där bilderna klipptes mellan ”den verkliga världen” och den virtuella.
En mamma återförenas med sin avlidna dotter i VR
Först ser vi hur Jang står framför en massiv grön skärm medan hon bär både ett VR-headset och någon slags haptiska handskar. Lite senare ser vi hur hon pratar med sin dotter, håller hand och till och med har en födelsedagsfest i deras favoritpark med en tårta med tända ljus.
VR-återföreningen är, som du kan förvänta dig, extremt känslomässig. Jang börjar gråta i det ögonblick hon ser den virtuella Nayeon, medan resten av familjen, Nayeons far, bror och syster ser hur den känslomässiga återföreningen mellan mamman och dottern utspelas framför dem.
”Kanske är det ett riktigt paradis,” sade Jang om återföreningen i VR enligt Aju Business Daily. ”Jag träffade Nayeon, som mötte mig med ett leende för en mycket kort tid, men det är en mycket lycklig tid. Jag tror att jag har haft den dröm jag alltid velat ha.”
Enligt Aju Business Daily tillbringade produktionsteamet åtta månader på projektet. De designade den virtuella parken efter en som mor och dotter hade besökt i den verkliga världen, och använde rörelsefångstteknologi (motion capture) för att spela in rörelserna hos en barnskådespelare som de senare kunde använda som modell för sin virtuella Nayeon.
Processen är kanske inte enkel, och slutprodukten kanske inte är helt perfekt, men vi har nu tekniken för att återskapa de döda i VR – övertygande nog för att få sina nära och kära till tårar. Konsekvenserna av detta är omöjliga att förutsäga.
Det kan ha tagit ett helt team av experter att producera ”Jag träffade dig”, men hur långt är vi från att ha en plattform som låter någon ladda upp bilder av en avliden kärlek och sedan interagera med en virtuell version av den personen? År? Månader?
Vilken typ av påverkan kommer detta att ha på sorgprocessen? Kommer det hjälpa människor att komma till ett avslut och gå vidare med sina liv, om de får se en nära anhörig i VR efter dennes död? Kommer vissa människor bli beroende av den virtuella världen, spendera mer och mer tid i den och mindre och mindre i den verkliga? Och kommer det att sluta med VR? Eller är detta bara det första steget till androider utformade för att härma, imitera och ersätta våra döda nära och kära till både utseende och personlighet, som i avsnittet ”Black Mirror” Be Right Back?
Nyckeln till att en VR-återförening blir en positiv sak, det vill säga mer som ett tjugoförsta århundradets utvecklade variant av ett fotoalbum och mindre som ”Black Mirror”-avsnittet, verkar vara att den levande personen helt accepterar sin älskades död.
”Eftersom du vet att personen är borta accepterar du den virtuella motsvarigheten för vad den är – ett tröstande minne,” sa Princeton neurovetenskapsman Michael Graziano till Dell Technologies i december. ”Det är inget fel eller oetiskt med det.”
Kanske är reglering nödvändig? I stället för att låta nystartade företag erbjuda allmänheten chansen att interagera med virtuella versioner av sina döda nära och kära, utan tvekan till en kostnad, kanske vi bör göra tekniken tillgänglig endast för personer som först har genomgått en screening med en psykolog?
Det är svårt i dagsläget att säga vad som kan fungera eftersom möjligheten att interagera med övertygande versioner av den avlidne i VR definitivt är ett outforskat territorium. Men nu när vi officiellt har kommit in på den arenan har vi många frågor vi måste svara på så snart som möjligt.
Diskussionsfrågor:
Skulle du vilja träffa en avliden person som du älskar igen, i en virtuell värld?
Vilka fördelar ser du med den här tekniken?
Vilka nackdelar ser du med den här tekniken?
Anser du att det är etiskt att använda AI och VR-tekniken så här?
Tycker du att den här teknikanvändningen borde regleras?
Vilka företag eller organisationer tycker du borde hantera och erbjuda den här typen av tjänster?
Vilka yrkeskategorier anser du bör vara inblandande i projektgruppen för att utveckla en sådan här VR-upplevelse?
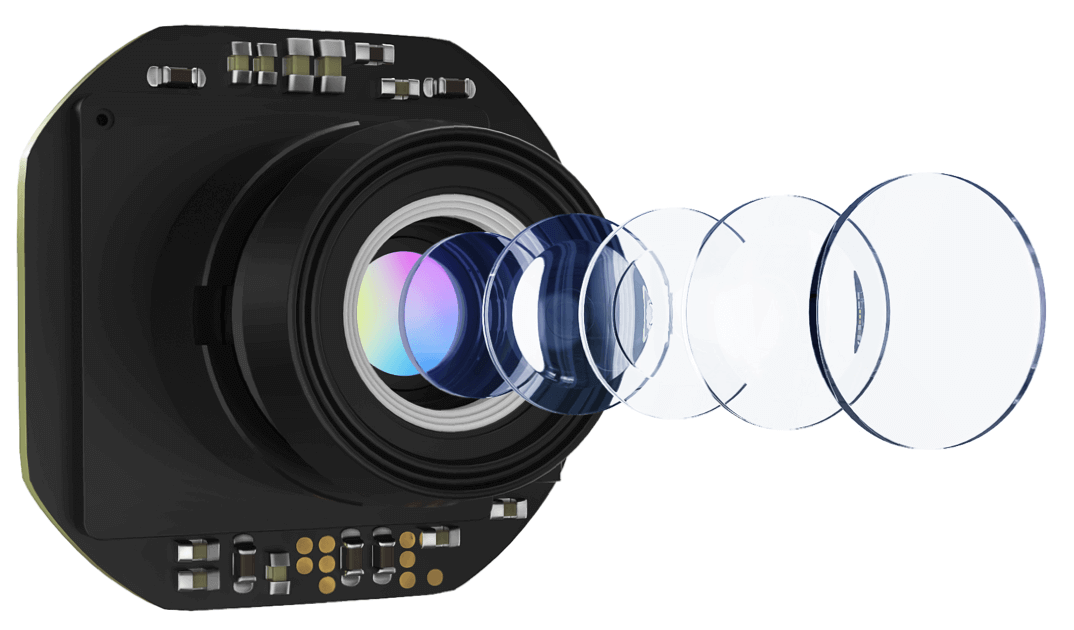
DJI Spark är riktigt intressant liten drönare, fullpackad med avancerad teknik och smarta funktioner. Den är liten nog för att startas från din handflata, kan styras av dina handrörelser och känna igen ditt ansikte och andra objekt som den kan följa, fotografera och filma. Drönaren är utrustad med en kamera med 1/2.3” sensor som spelar in Full HD 1080p videos vid 30 fps eller 12 MP stillbilder med en exceptionell bildkvalitet vid både fotografering och videoinspelning.
Produktegenskaper
Spela in video i Full HD 1080p
Upp till 2km räckvidd
Hastighet upp till 50km/h
16 minuters flygtid på en laddning
2-axlad gimbal
12 Megapixels stillbilder
Följ objektet.
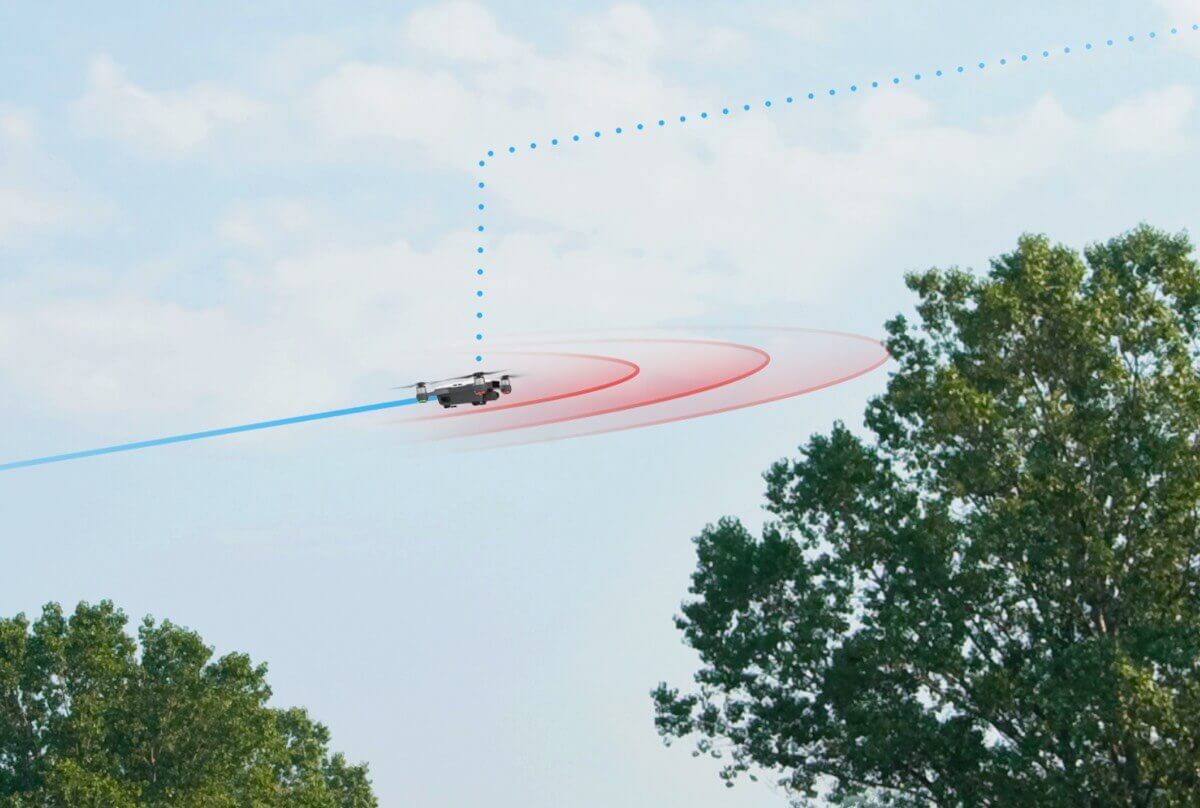
Med ActiveTrack så känner Spark automatiskt av objektets rörelser och riktning och följer objektet med kameran. Man kan även välja att cirkulera med Spark eller att Spark följer med objektets.
Fånga dina ögonblick.
Du kan ge kommandon till Spark med hjälp av enkla handrörelser som att ta en selfie eller så kan du vinka till Spark för att den ska flyga upp en bit ifrån dig eller vinka tillbaka den.
Skakningsfria bilder och video.
Sparks 2-axlade gimbal ger dig en mjuk och följsam video och bilder utan skakningsoskärpa.
Fånga världen
Sparks bilder håller hög kvalité tack vare de skarpa linserna och bländaröppning på f/2.6 och tack vara en vidvinkellins på 25 mm (135mm formatet) så är det lätt att fånga det du vill.
Hastighet och precision
Med sin aerodynamik. Lätta vikt och slimma design kan Spark flyga genom lyften med minimalt luftmotstånd. Kameran och gimbal sitter väl skyddat för att få den bästa stabiliseringen som är möjlig. Tack vare kraften och propellrarna klarar Spark av att stå emot starka vindar och du kan flyga u hastigheter upp till 50km/h i sportläget.
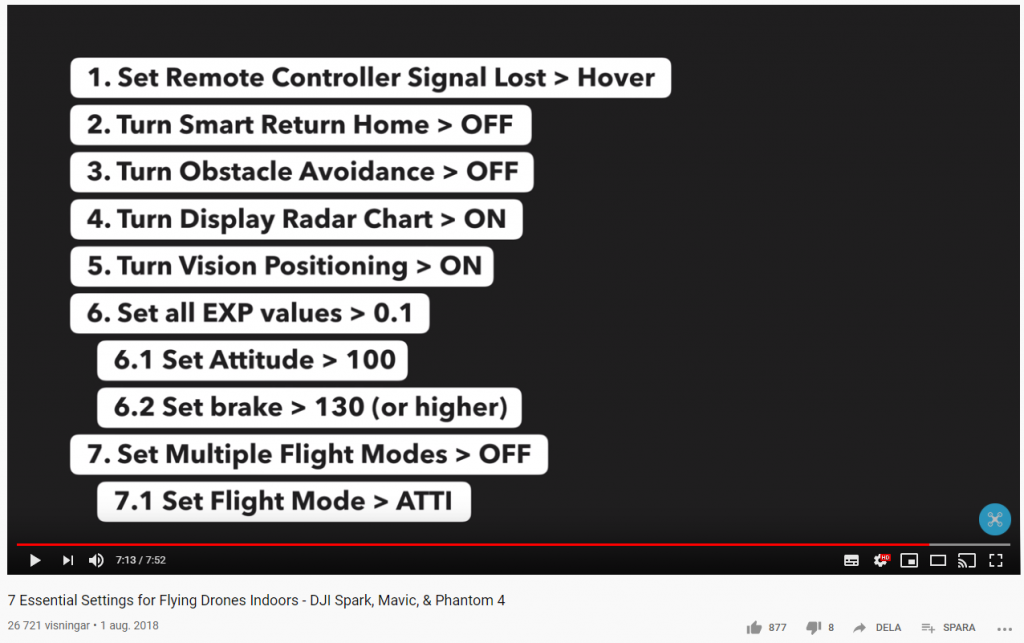
Bekymmersfri flygning
Som alla de senaste DJI drönarna har även Spark möjlighet att återvända hem när batterier börjar blå svagt eller om den tappar kontakt. Spark flyger tillbaka till den förutbestämda plats du bestämt samtidigt som den känner av om det finns hinder på vägen. Den nedåtriktade kameran fångar för att känna igen sig när den återvänder hem.
Flyg smartare
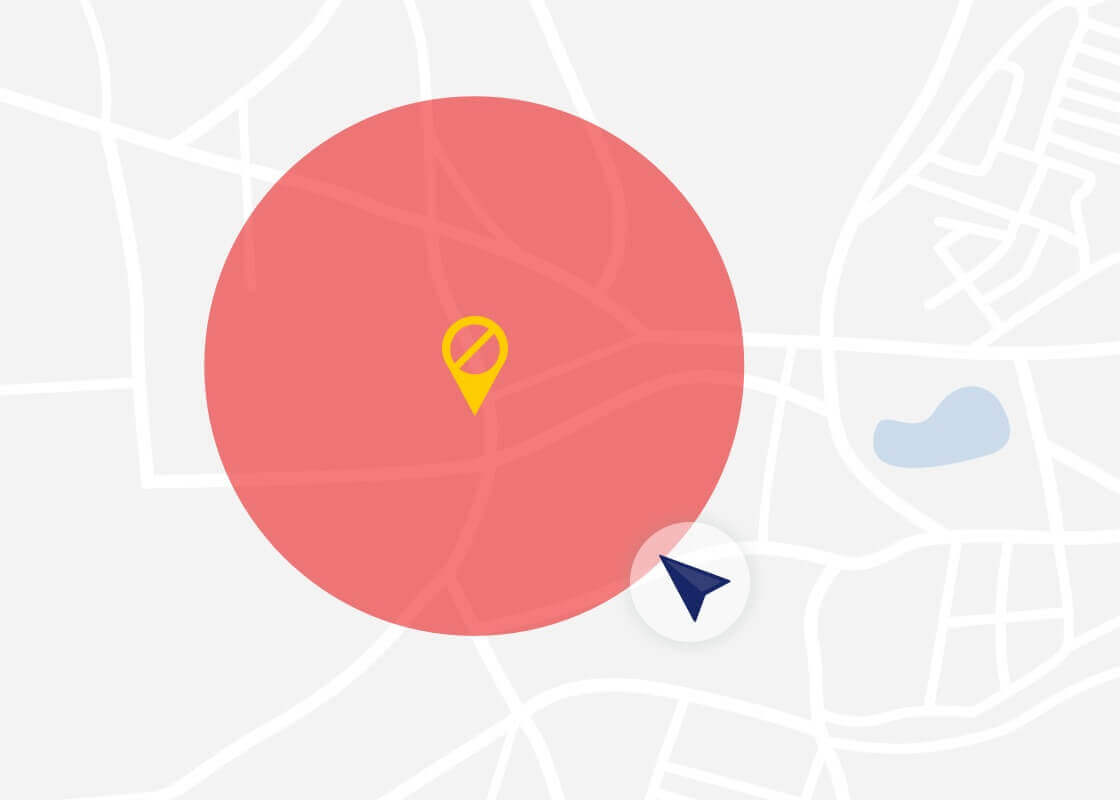
DJI’s GEO-system låter dig veta om din drönare eventuellt befinner dig i närheten av flygsäkra områden för att du bekymmerfritt ska kunna flyga din drönare på ett säkert sätt.
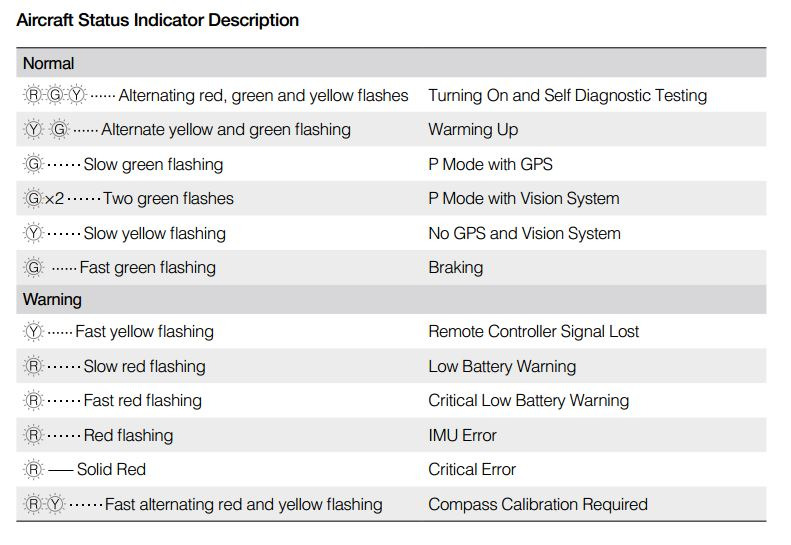
Information om vad lysdioderna på landningsställen indikerar vid olika situationer.
Information om vad lysdioderna på landningsställen indikerar vid olika situationer.
In this clip I provide a complete guide to using, storing and charging your DJI Spark batteries. I provide a lot of useful information to help you get the longest flight times possible from your cells and help you understand how you can extend their useful life. Time Codes: 04:53 – Overview & Specifications 10:00 – Good & Bad Things 20:10 – LED Codes 24:10 – Temperature Guidelines 28:18 – Tips & Tricks 35:08 – DJI Go4 Battery Overview 39:00 – Interesting Bits 45:47 – Accessories Drone Valley Website – www.dronevalley.com
The thrill of taking a corner, extremely low to the ground, with your gut telling you these g-forces are not normal… that’s why we spend countless hours building these silly Power Wheels vehicles. The giggles and grins are unavoidable! These cars are so much fun to drive — and even more fun to race!
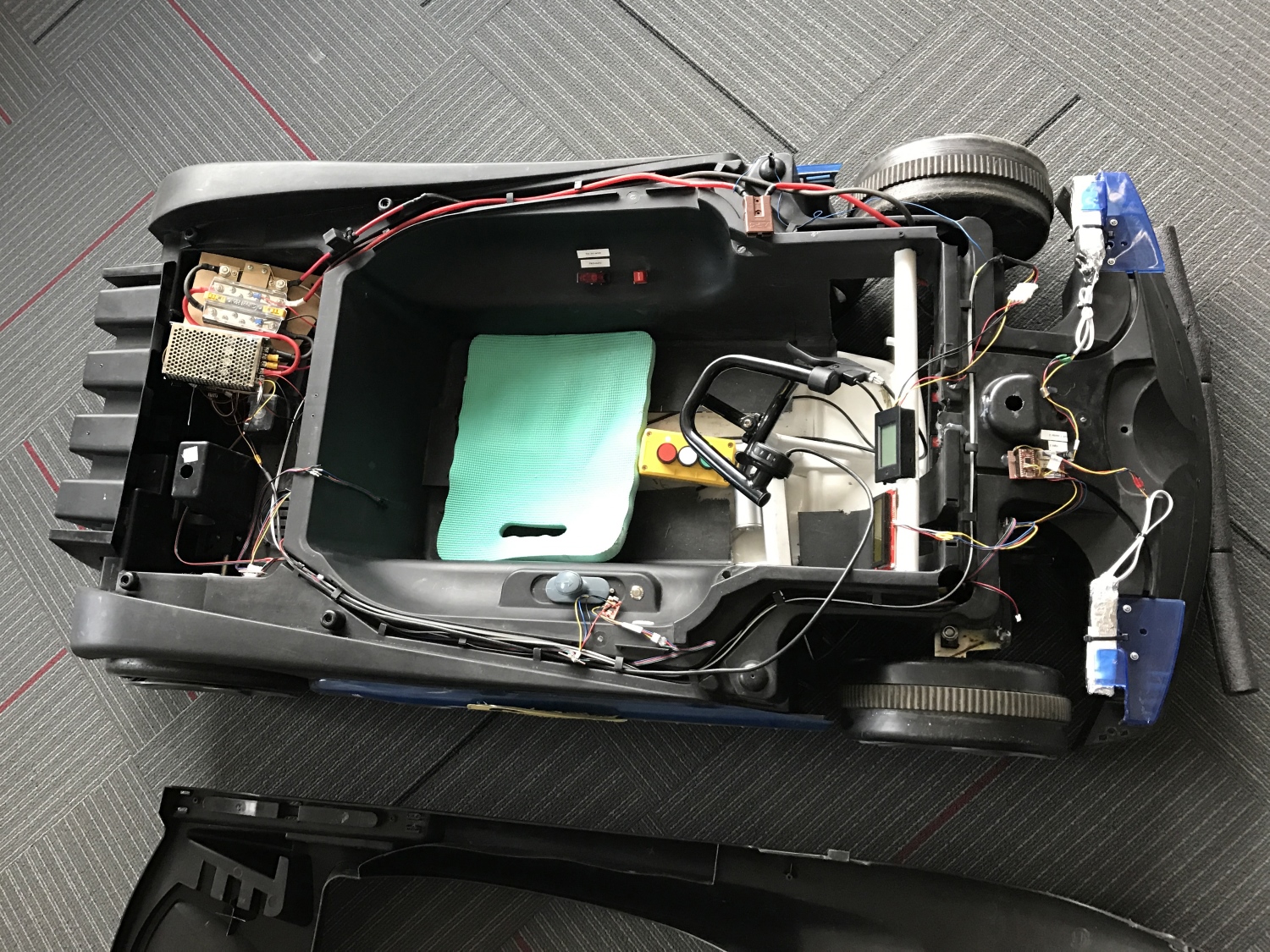
In 2016, SparkFun had its eighth annual Autonomous Vehicle Competition. This year saw the introduction of a new rule: you needed to carry a human (or a 20lb dead weight in the form of a watermelon if you were too chicken). To do this, my wife, Alicia, and I modified a Batmobile Power Wheels and combined it with a Razor chassis. The result was an extremely zippy electric go-kart that left a perma-grin on everyone who drove it.
Our goal was to create a vehicle that could quickly and easily switch between human driver and driverless modes so that we could compete in both PRS and A+PRS categories. In the end, Alicia placed a very respectable third place in the driver category, and I did not finish (DNF) in the autonomous category, running into numerous hay bales.
This tutorial attempts to document a six-month build process for an Autonomous + Power Racing Series (A+PRS) vehicle. Every autonomous vehicle is unique, and the requirements of each will vary from build to build.
The AVC rules stipulate that you cannot spend more than $500 on your total budget and that you have to stay within certain size restrictions. We started trolling craigslist to see what was out there and immediately found a plethora of free or cheap “broken” Power Wheels. When a Batmobile for $25 popped up, we quickly snagged it.
Dusty with dog hair and dead spiders — it’s perfect!
The primary failure of all used Power Wheels is a dead battery. The Batmobile was no different; as soon as we put in a new 12V SLA (Sealed Lead Acid), it happily, albeit slowly, drove around. There is nothing magical about “Power Wheels” branded batteries; get the right voltage (usually 12V, sometimes 6V), and you can use almost any battery you’d like.
The original batmobile chassis blow molded plastic at its finest. The wheels are hollow, the motor is designed to move a child slowly (and reasonably safely), and the steering is littered with bits of metal but mostly loose and wobbly. While the stock chassis was capable of moving adults weighing in at around 200lbs, we knew it wouldn’t handle racing, so we decided to find a metal chassis to sit underneath.
Note the size of the motor and battery. Those are about to get much larger.
Razor is known for their kick scooters, but they’re in the electric go-kart market as well. We found a Razor Drifter Open Box for $165. The Drifter had the steering, brakes, wheels and chassis sorted out for us! Additionally, the Drifter came with a stock 24V battery, 250W motor and 250W motor controller.
Many PRS and AVC competitors are talented enough to weld their own chassis together. DIY welding is a great way to save money, but it may take weeks of fabrication. Because we planned to enter the autonomous field, we decided to find a ready-made chassis and spend our time building and debugging the autonomous bits.
Putting on a Hat
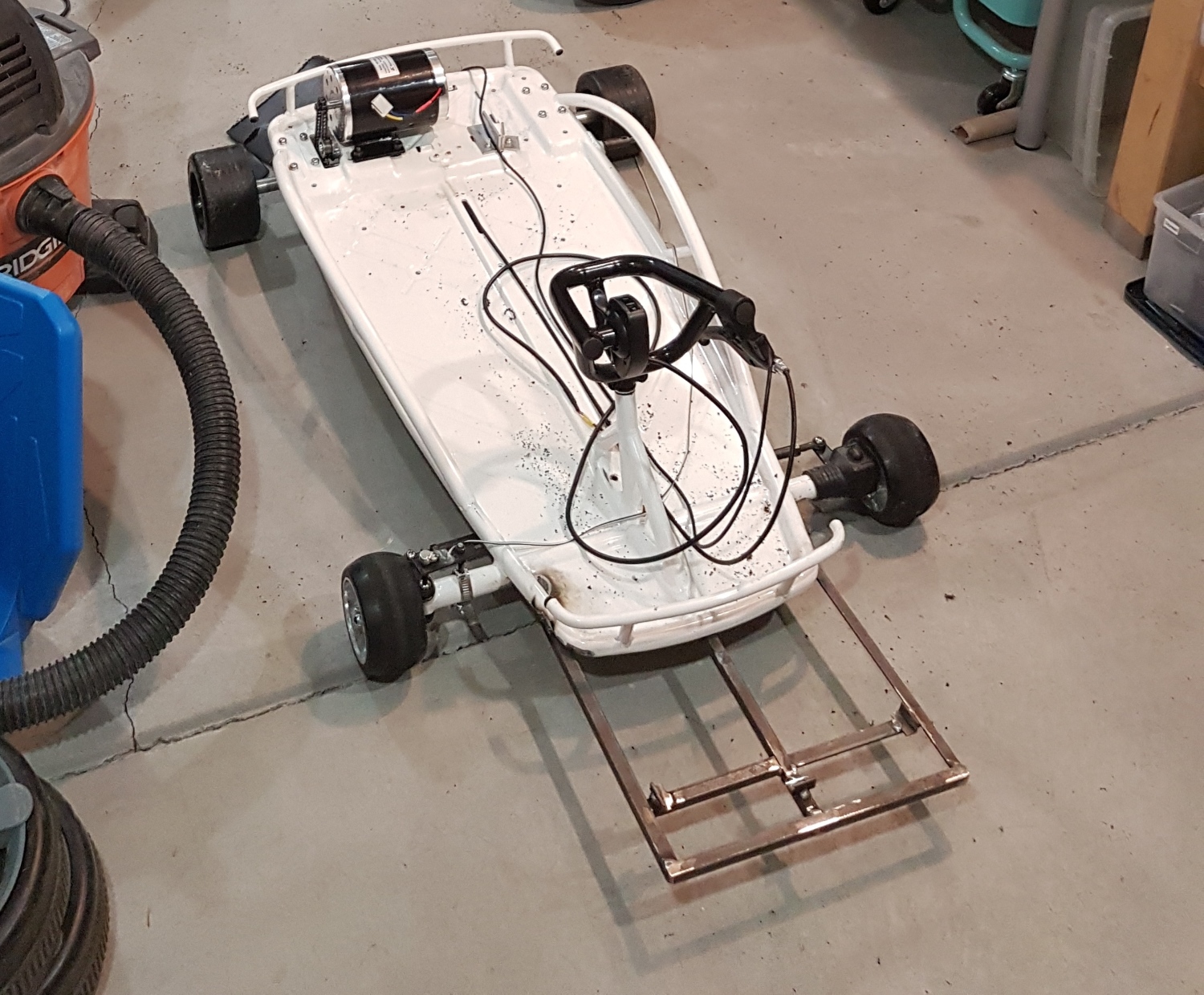
Once we had the Power Wheels and the Razor chassis, we had to combine the two.
We slid the razor chassis underneath the plastic batmobile shell. The razor chassis has strength where we needed it most: steering, chassis, brakes, drive train, everything. The plastic batmobile is just there as a shell. The four solid plastic+rubber razor wheels make contact with the ground. The four hollow batmobile wheels hover above the ground and are there only for cosmetic looks (for the lulz).
A Power Wheels meets a Drifter
At some point you have to get out the reciprocating saw and severely modify your beautiful Power Wheels. We laid the Batmobile over the Razor and proceeded to chop off all the bits that got in the way.
Bare metal chassis before shell is laid on top
Seats? Where we’re going, we don’t need seats!
Pleasingly, the Batmobile sits on top of the chassis under its own structural support. We didn’t need to add all-thread or other standoffs. Even though they don’t do anything, we reattached the original wheels just so it looked extra wacky.
Motor and Motor Control
Moar!
In 2016, A+PRS allowed 48V systems, so the first thing we did was remove the 24V motor and install a 1,000W 48V/21A motor. The PRS rules limit any system to 1,400W, so we could have gone larger had budget constraints not been kicking in fast. New mounting holes were drilled into the chassis, and a different gear had to be mounted to the end of the motor. But it all went well. The stock chassis even included a chain tensioner that proved invaluable!
The MY1020 48V motor we used is common on the PRS circuit and performed great. However, our original 1,000W motor controller (you should already be able to tell what’s coming) did not do so well. Our first tests of the 48V system in an open parking lot worked great until the motor controller overheated and failed. And when MOSFET-based motor controllers fail, they fail unsafe, meaning our vehicle decided to go to 100 percent throttle and stay there. This is why we have safety switches! Alicia and I were able to kill the vehicle before anyone got hurt.
This failure should have been prevented: a motor controller should be rated for at least 2 times what you calculate your maximum load will be. In our case, if we wanted to control a 1kW motor, we should have been using a motor controller rated to a constant 2kW load. Luckily, the A+PRS rules don’t require you to record how much money you spent (and burned up); you have to report only what is on the vehicle as it rolls on race day.
The new, larger 5kW motor controller
We quickly located a larger, 5kW motor controller (this one even had reverse!) and got it on order. This larger motor controller has been working swimmingly ever since. Find a motor controller with reverse. You’ll be tempted to drive your souped-up Power Wheels in weird places (like the SparkFun inventory aisles), and a reverse gear allows for hilarious 5-point turns.
Brakes
Go-kart drum brakes on eBay
The Razor chassis had the classic drum brake, perhaps the weakest link of the Razor. While the stock brake was probably the appropriate size for a 75lb child with stock 24V batteries, our brakes got really squishy once we added an additional 125lbs of meat bag, batteries and plastic bits. We rarely, if ever, used the brakes during races, but the PRS rules stipulate that your qualifying lap must end with the driver crossing the finish line and braking to a stop:
At the end of the hot lap, your car will have to come to a complete stop within 18ft of when its transponder crossed the start/finish line. Deliberately skidding, swerving or spinning out is not an acceptable method of braking for the brake test.
Alicia had to do an impressive combination of hard braking, swerving, skidding and sliding with such a dramatic flair that she wooed the judges into not noticing how dodgy our brakes were. We’ll have disc brakes installed before we roll in the 2017 race.
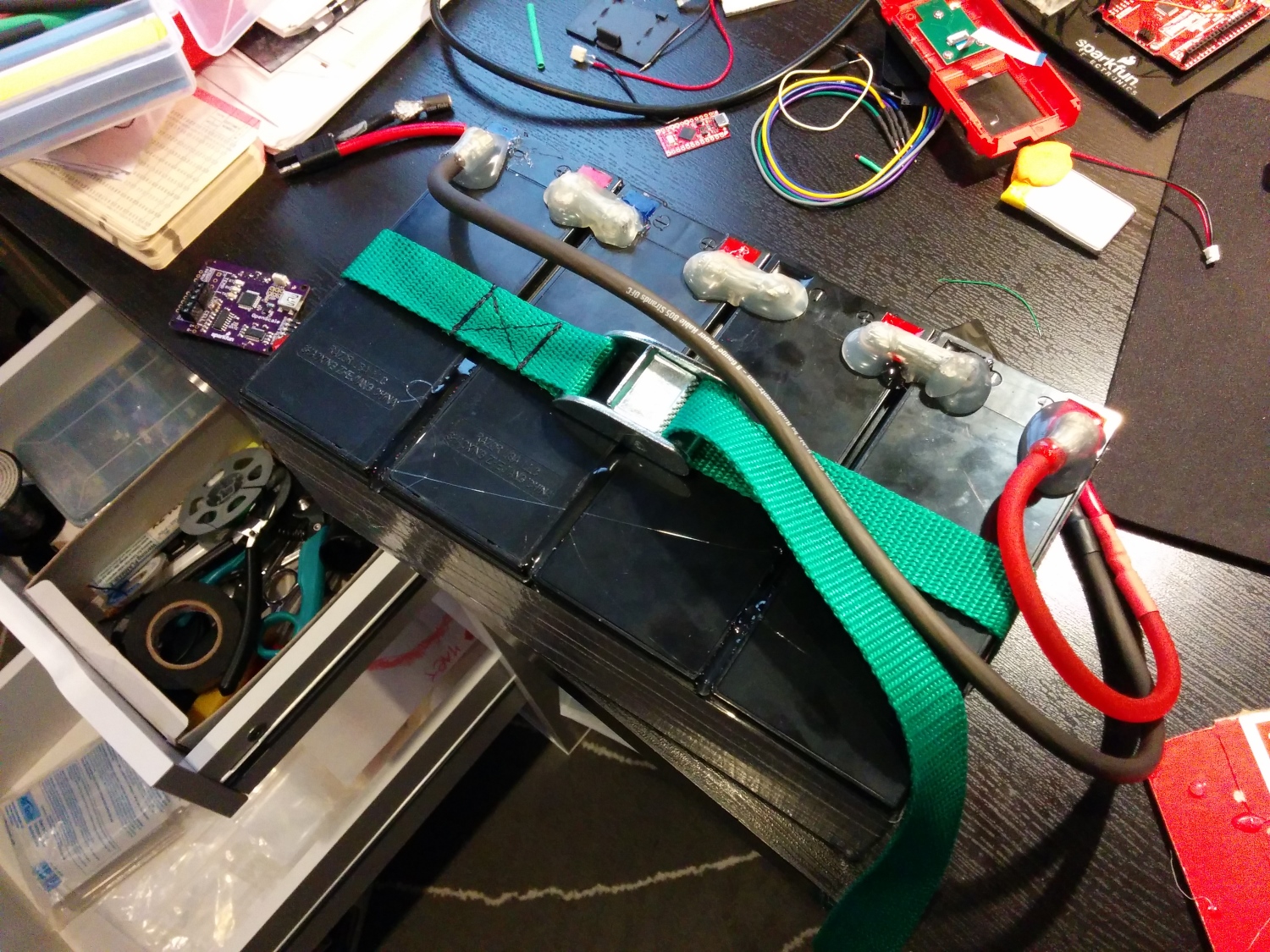
Batteries
Battery holder welded onto the front of the chassis
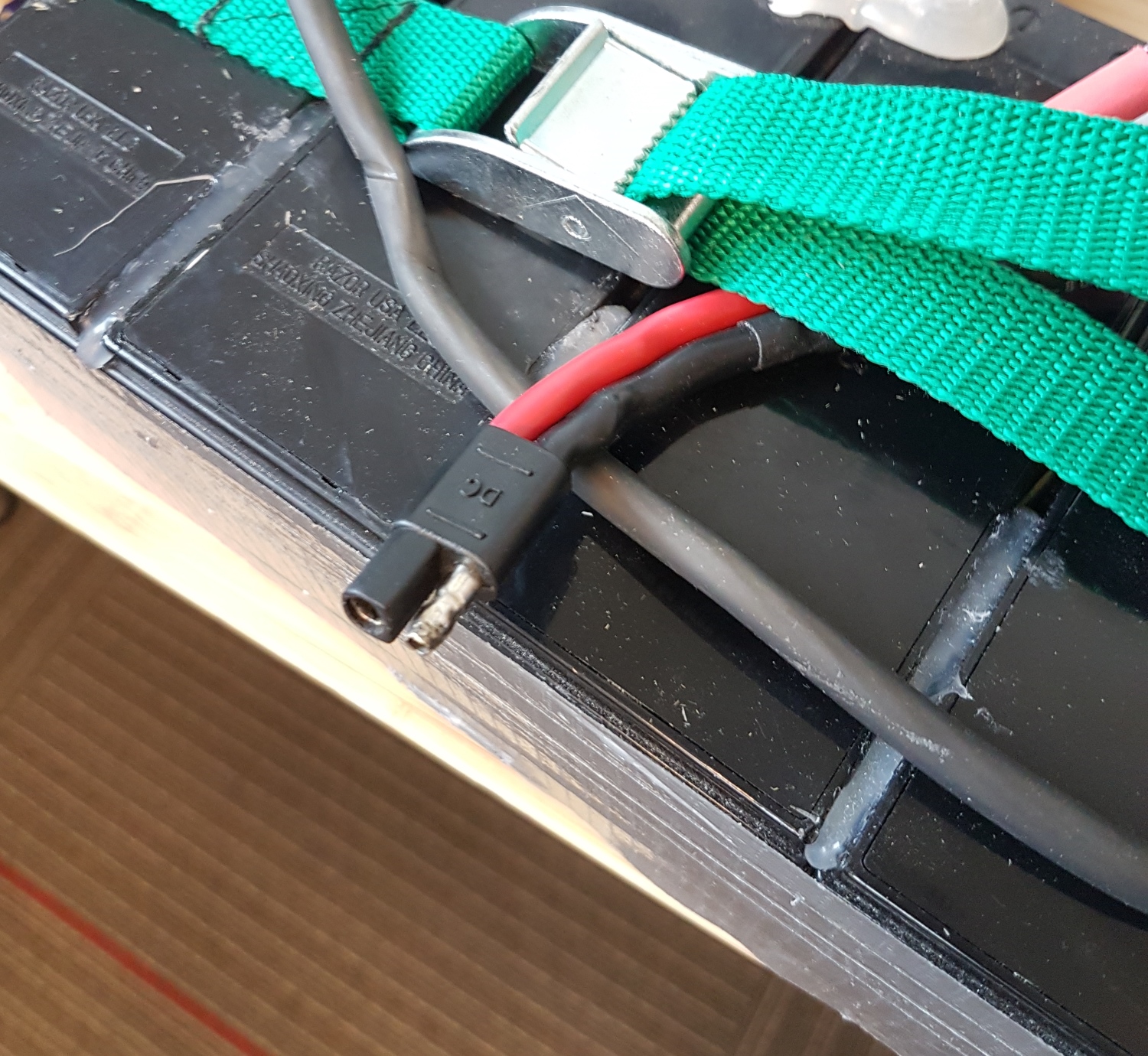
As part of the motor upgrade, we needed to increase the battery voltage to 48V. To save money, we reused the super common batteries that came with the 24V Razor chassis. Razor was smart; they looked at the SLA (Sealed Lead Acid) battery industry and picked the most common size. This just happened to be the same battery that goes into nearly every UPS on the planet. We purchased two additional UPS-size batteries (way cheaper than buying Razor-brand batteries) and wired them in series.
Four batteries combined in series
Taping the cells together and adding a bead of hot glue between the cells made the pack nicely rigid. A low-cost, polarized, high-current connector finished off the pack. We had an old strap lying around that made all the difference in the world; it’s a lot more comfortable carrying the pack one-handed by its handle than with two hands underneath.
Avoid fires and other bad things. Use polarized connectors for your batteries.
Wire
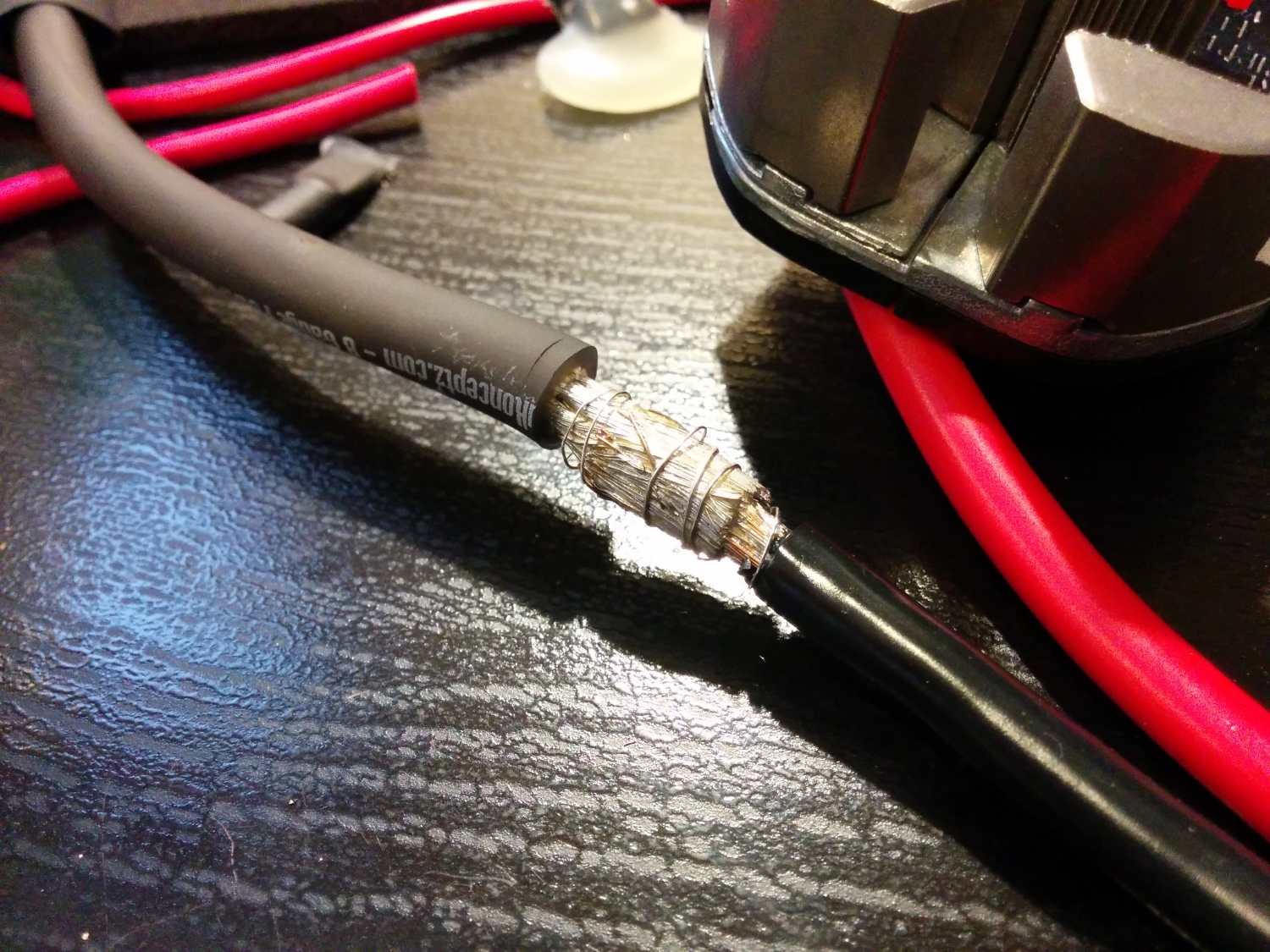
Soldering large-gauge wire
We originally spec’d out some really nice, super flexible silicone-sheathed 8AWG wire for power distribution. I don’t think we would do this again; 10AWG would have been fine, and probably even 12AWG. As 8-gauge is far less common, the wire and connectors are more expensive, and the larger gauge wire takes a lot more soldering heat — it’s just a pain to work with. If you need the current capacity, go for it, but for our extremely zippy, 48V 20A vehicle, 8-gauge wire was overkill.
If you decide to use super flexible, large gauge wire, spend some time on the internet reading about how to solder this type of wire.
The best technique I found:
Make sure you’ve got heat shrink in place
Turn your soldering iron up to 425C (way hotter than the 325C usually needed)
Push the ends of wire together
Wrap tightly with 30AWG wire wrap wire
Liberally apply flux
Heat and insert lots of solder until the joint turns silver
Here’s a good video demonstrating this technique:
Kill Switch
We documented how to build a wireless kill switch while making margaritas. It was a ton of fun, so we’ll skip the bits of the wireless kill switch system here.
Zroooommmm!
In addition to the wireless disconnect, we had a large, red mushroom kill switch that disconnected the battery with a pleasing and authoritative ”thunk.” Pulling up on the mushroom button reconnects the battery to the system.
Batman logo or Bitman logo?
As a pleasant bonus feature, the mushroom kill switch got rid of the nasty sparks. When connecting the battery to the motor controller, there was such an inrush of current into the capacitors and electronics that the connector would spark. Once we got the kill switch installed, we could connect/disconnect batteries without these sparks.
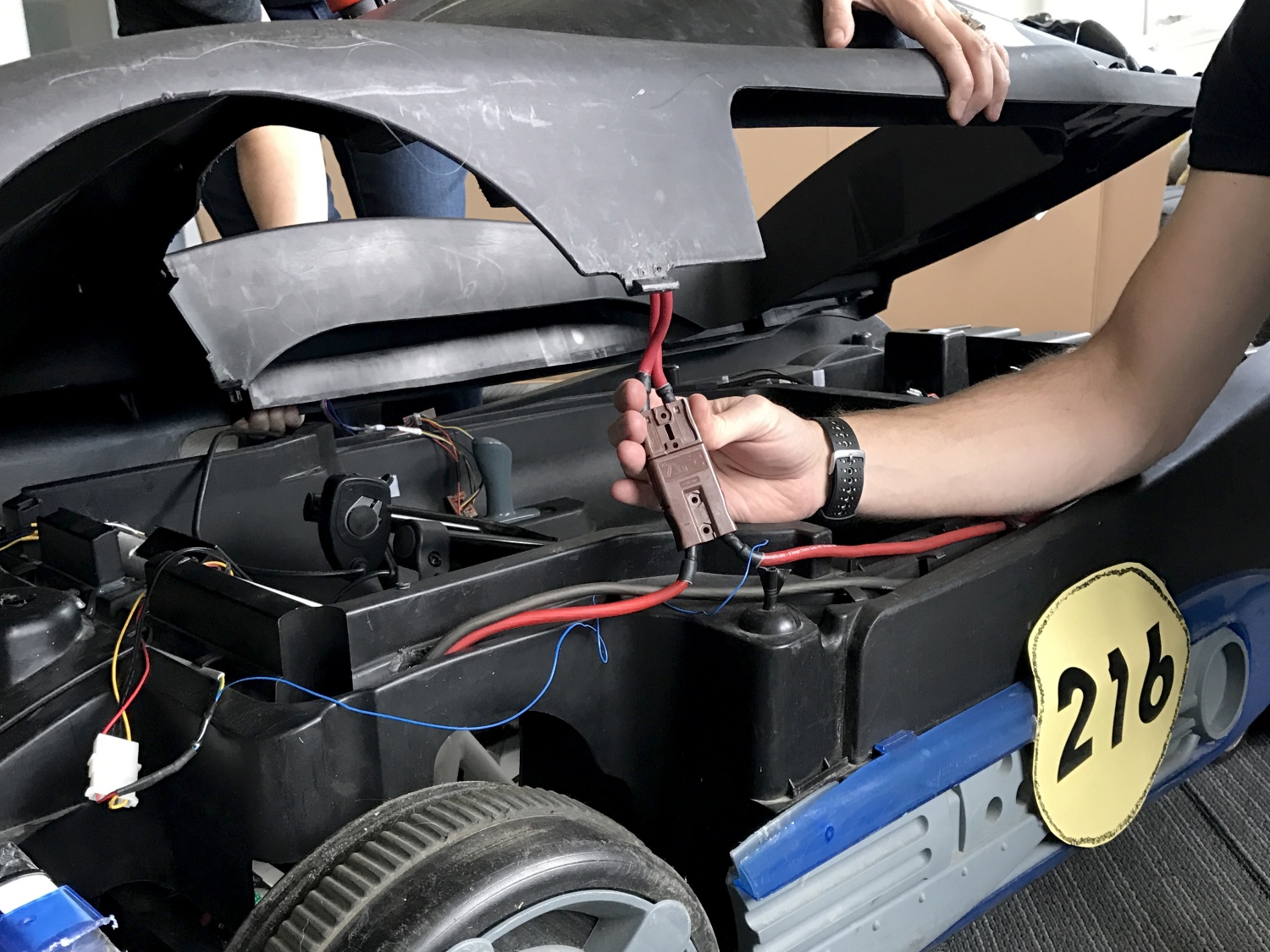
Connector between kill switch and power bus
The top of the Batmobile was easily removed, but because it had the kill switch installed we needed a way to disconnect it easily from the power bus. We found a great high-power connector in a dead server UPS. These are often called ”winch connectors”, because they are higher current. With this connector, we are able to quickly disconnect the kill switch and remove the top when we need to get at the inside of the vehicle.
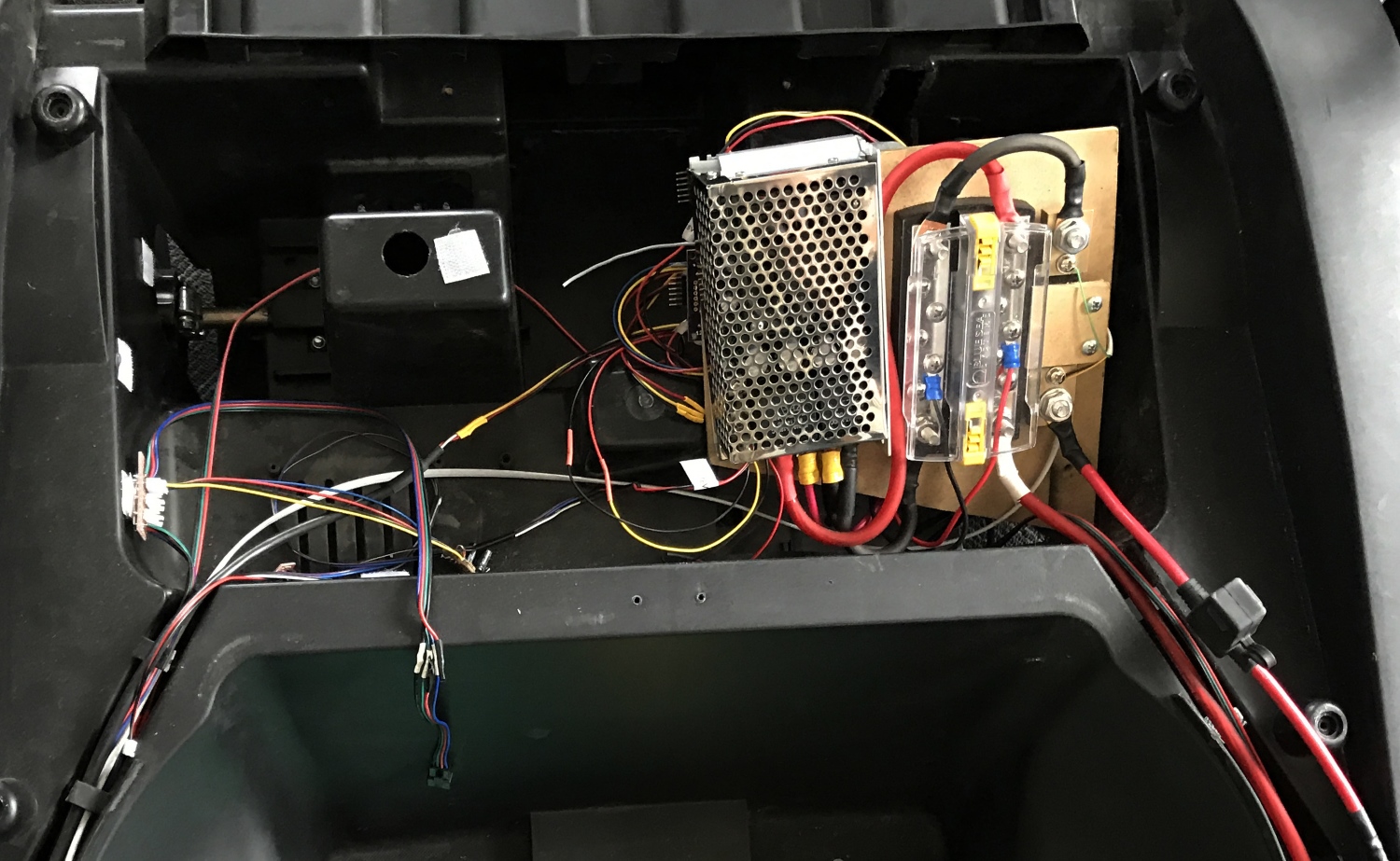
Control Electronics
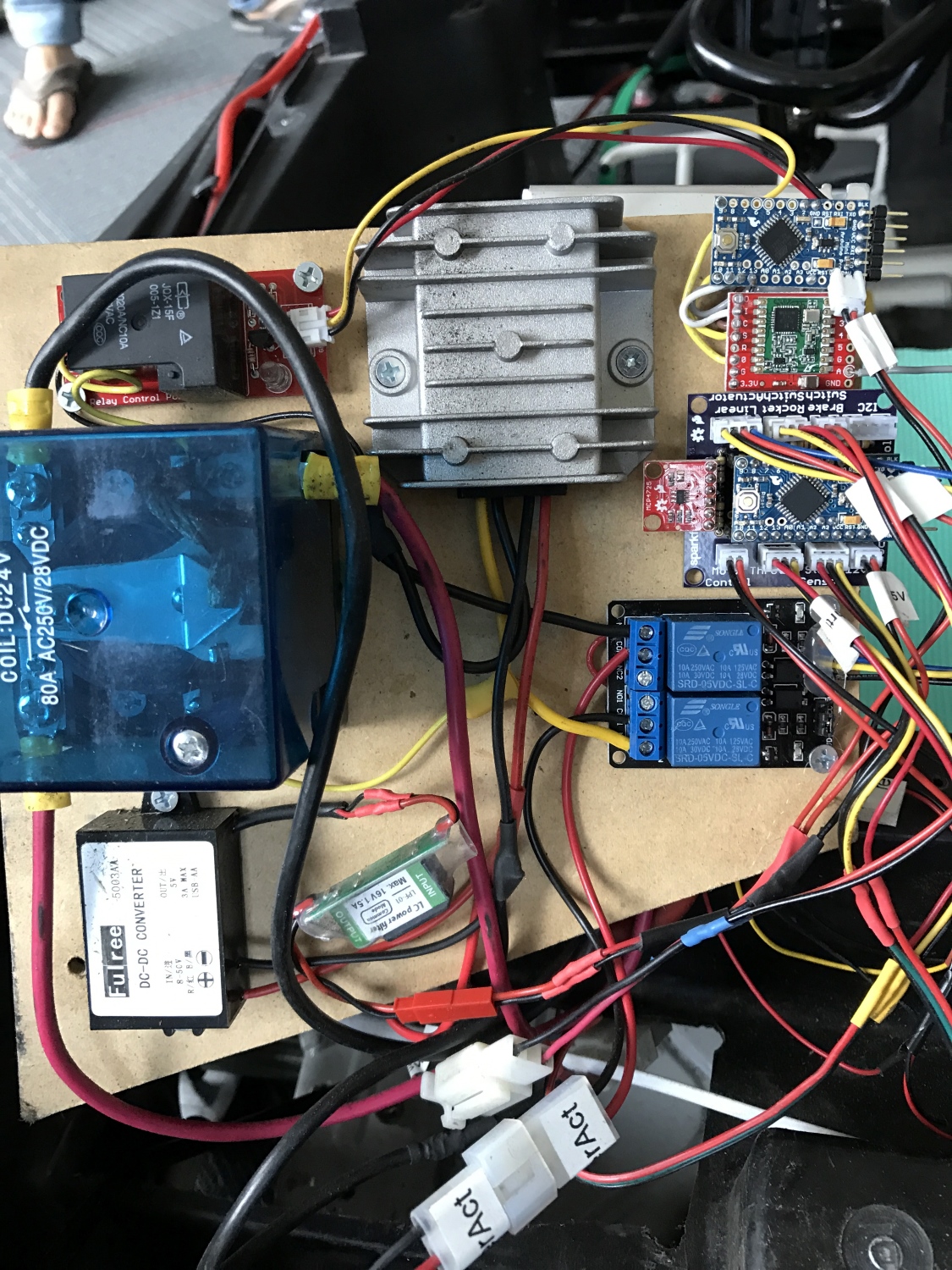
Power converters, motor kill relays, steering relays, locomotion controller and wireless communication
The control electronics are complex. We had a total of seven microcontrollers on this beast, plus three used in the distance sensors for a total of 216 bits of processing power. The system operated on an I2C bus with the brain sending commands to the locomotion controller and LCD and receiving data from the sensors.
The wiring underneath the Batmobile cover
For a previous 2010 AVC entry, I did everything on a single microcontroller. This made coding and debugging a challenge. On our 2016 entry, we focused each sub-system to do one thing very well.
The subsystems are broken down as follows:
Brain Controller: A SAMD21 Mini was used to communicate with and process all the data from the distance sensors, GPS and compass, and to send out commands to control throttle and steering. It monitored a start switch and relayed debug information to an LCD.
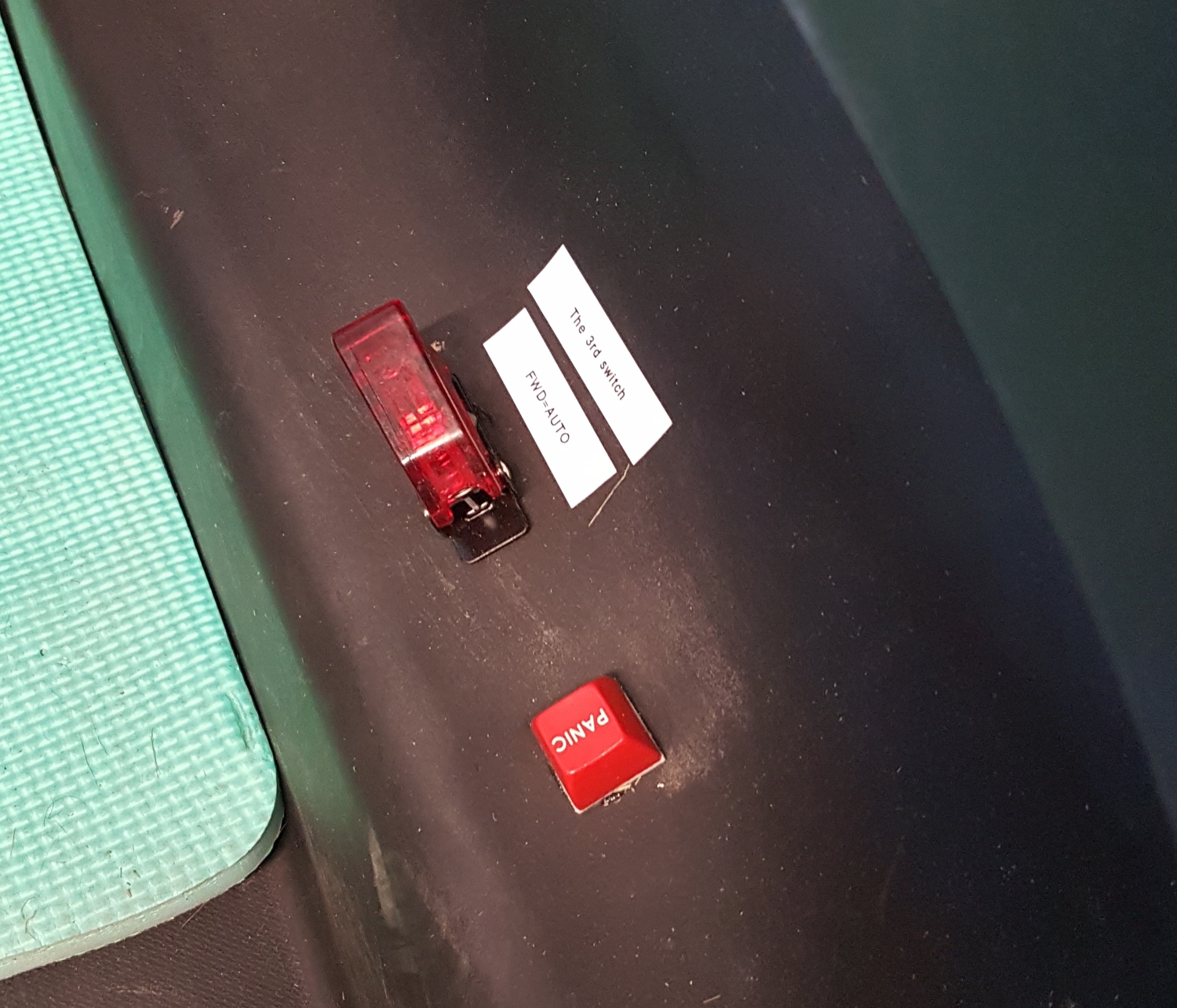
Locomotion Controller: An Arduino Pro Mini read the throttle, steering position, brake switch and autonomous rocket switch. It controlled motor speed and the linear actuator for steering.
Wireless Kill Switch: An Arduino Pro Mini lived in the wireless kill switch, a requirement for the autonomous part of our Batmobile. To learn more about the wireless controller, check out our tutorial on how to build a wireless kill switch.
A dedicated Arduino Pro Mini controlled the relays for the wireless kill switch system.
Debug LCD: We counted our LCD screen as a microcontroller since it has an Arduino in it.
Sensor Combinator: A SAMD21 Mini polled the serial GPS and I2C compass.
Laser Controller: A SAMD21 Mini controlled the three serial-based laser distance sensors, combined the relevant information and responded to requests from the Brain.
Three STM32s were the brains within the laser distance sensors.
Interested in learning more about distance sensing?
Learn all about the different technologies distance sensors use and which products would work best for you next project.TAKE ME THERE!
Control Electronics – Brain
The Brain is a SAMD21 Mini. It sends commands over the I2C bus to the locomotion controller and debug LCD.
4-pin JST connector at the top of the image: We used a 4-wire bus (5V, GND, SDA, SCL) for communication and had various taps throughout the bus to allow devices to be attached. This worked really well and allowed for devices to be moved around when needed.
4-pin JST connector to the left: This was four wires to the button. To tell the vehicle to begin navigating under autonomous control, we used a metal momentary push button that illuminates when everything is online and happy. The human presses the button twice, and the car commences racing.
Big gray handle: This was the original forward and reverse knob that we reused to control the direction switch on the motor controller (two pins when shorted together caused one direction, when open caused the other direction).
The massive and poorly written control code for the Brain can be found here.
EEPROM for Waypoints
The SAMD21 does not have internal EEPROM. Because we needed to store GPS waypoints and other configuration data to non-volatile memory, we used an external I2C EEPROM. Yes, you can use something called emulated EEPROM on the SAMD21, but, every time you reprogram the board, you will overwrite anything previously stored in emulated EEPROM. The external EEPROM made it much easier to store and recall waypoints and settings without having to mash together in the main control code.
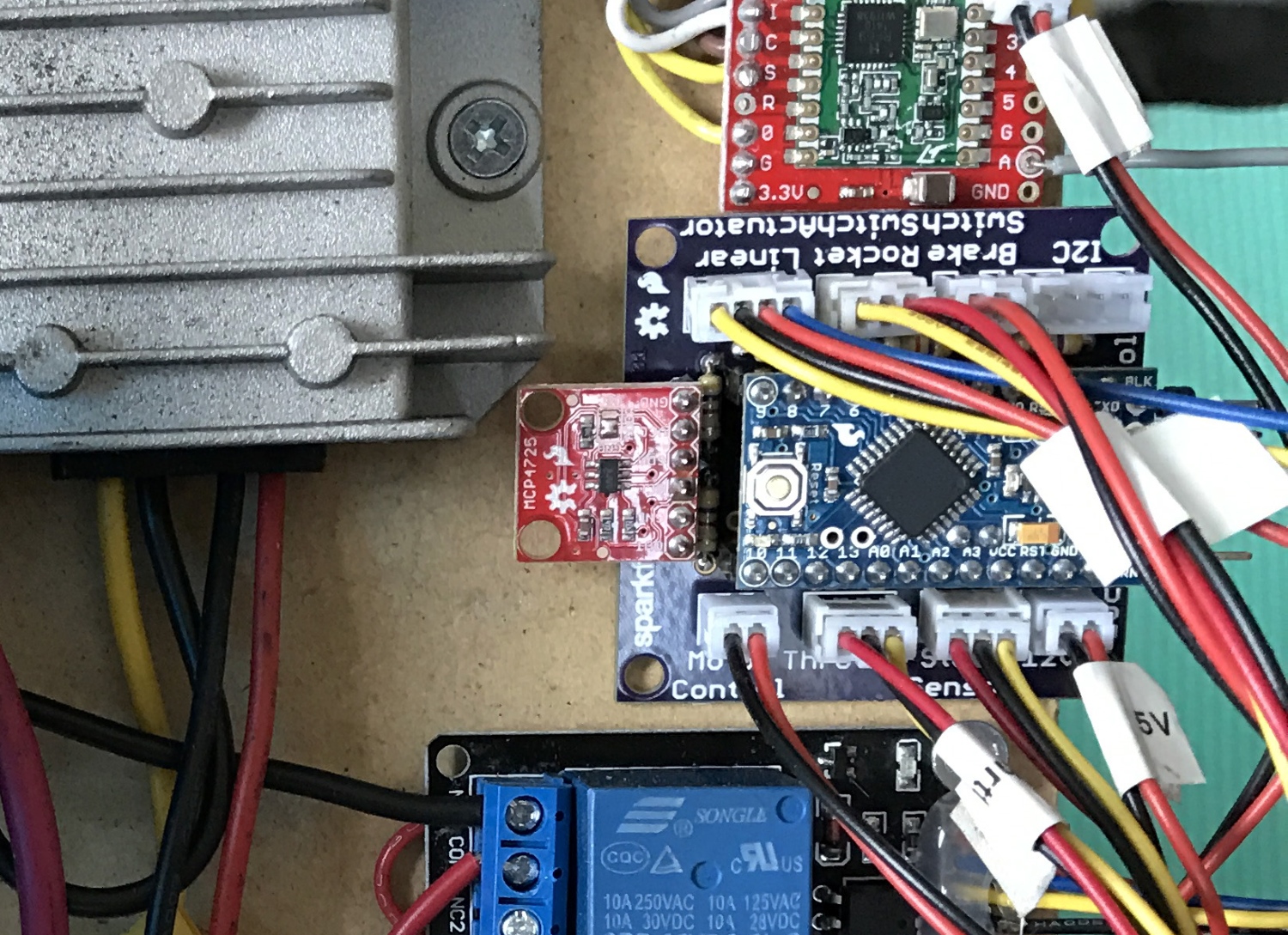
Control Electronics – Locomotion
Locomotion Controller hooked up
Note the polarized connectors and prodigious labeling! You DO NOT want to be guessing what gets plugged into where at 11 p.m. before race day. The Locomotion Controller code is available here, and the PCB layout here.
Because we eventually wanted this beast to be autonomous, we needed to put a controller in the middle between the throttle and the motor controller. We used an Arduino Pro Mini that did a huge variety of sensing and control:
Read the throttle
Output analog voltage to the motor controller
Read the brake switch
Read the steering position
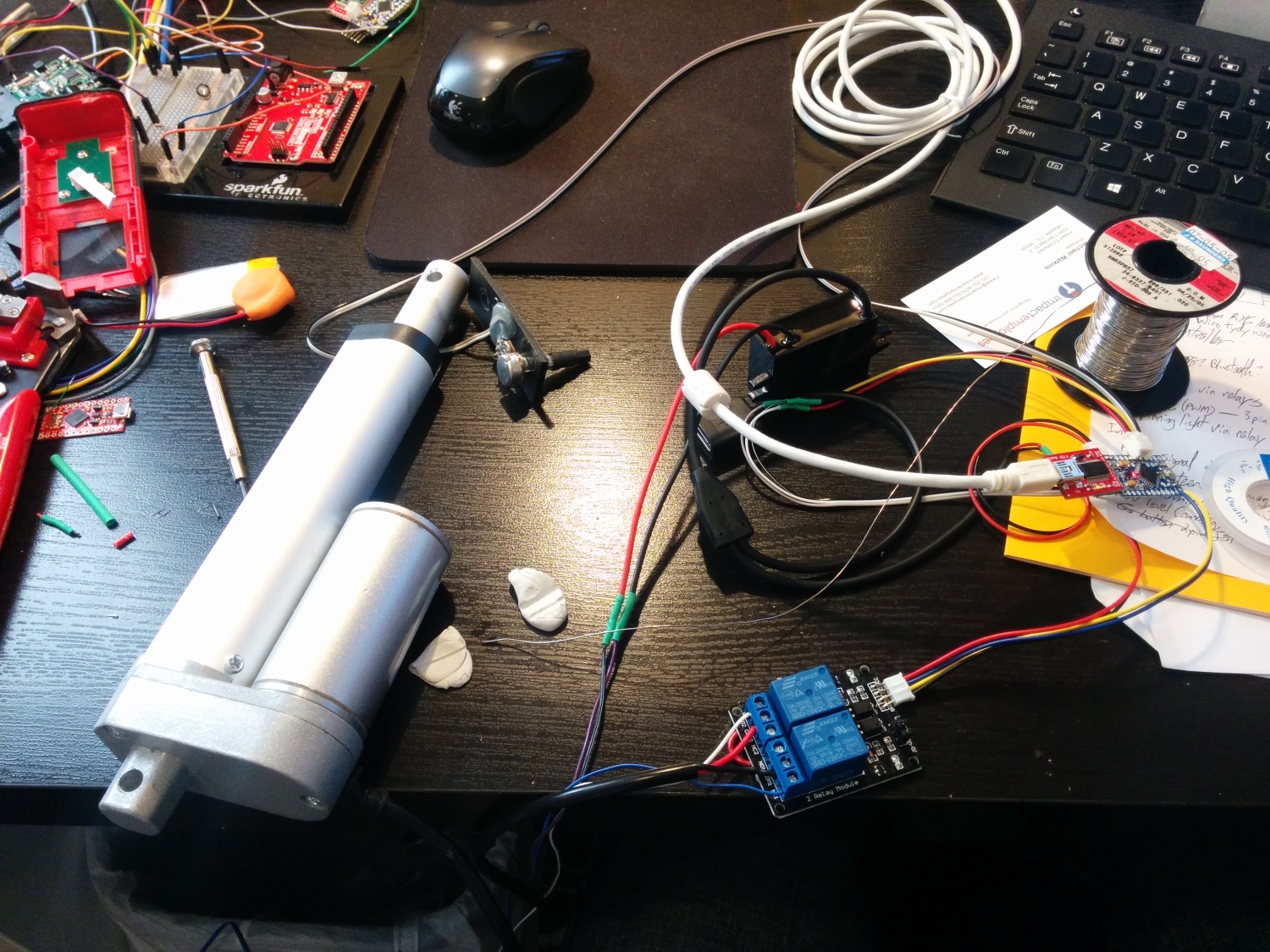
Controlled the linear steering actuator
Read the human/robot control switch
Received and responded to control commands over I2C
Don’t panic
The controller would monitor the rocket switch and brake switch. If a human ever pressed the brakes or turned off the rocket switch, the controller would go into safety shutdown and ignore any commands from the brain.
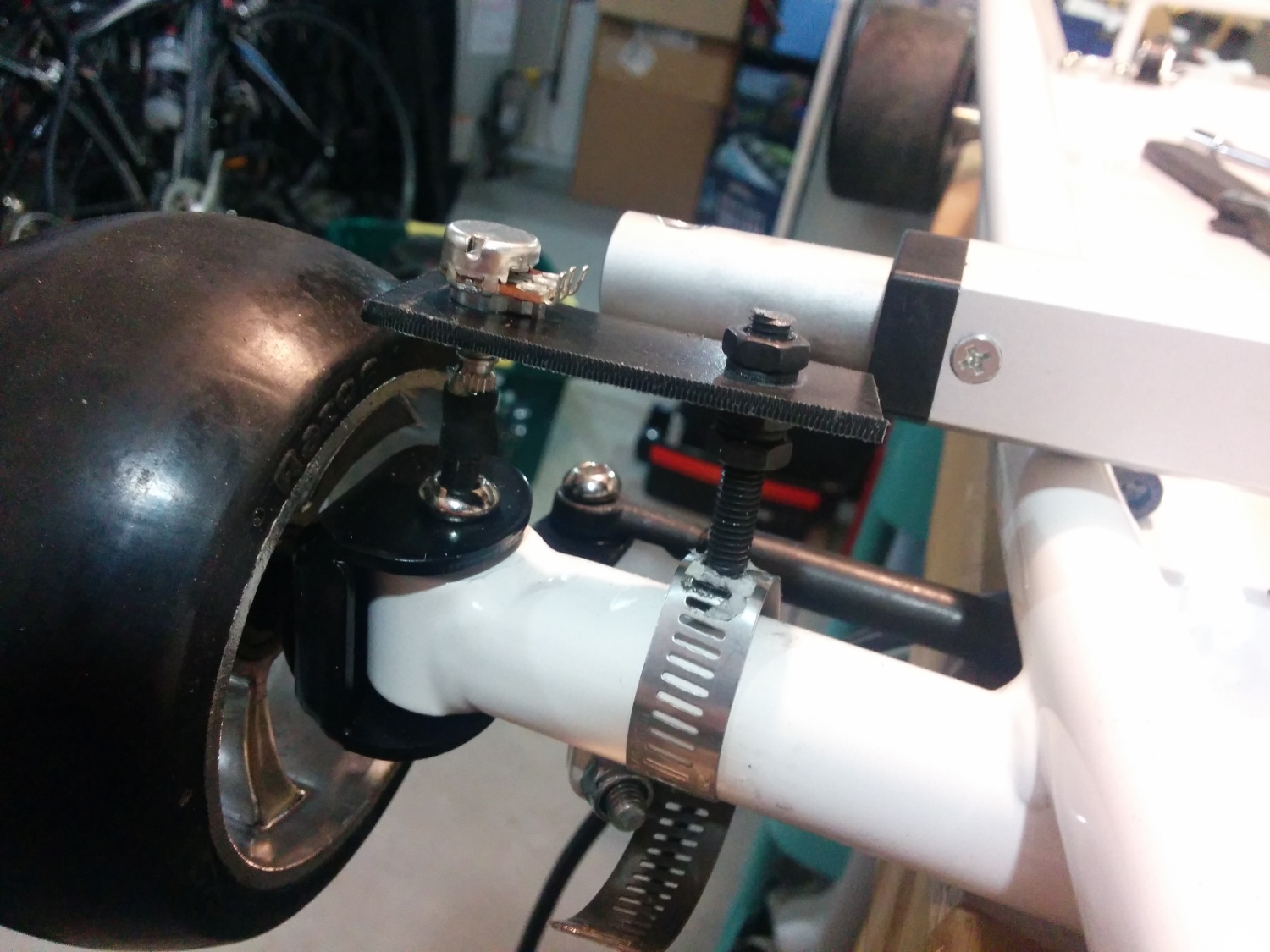
Steering was controlled using a 12V linear actuator over-voltaged to 24V for extra speed. Two relays controlled the forward/backward motion.
Steering position was obtained by cutting a hex wrench to about 1” and inserting that wrench into the bolt that rotates with the wheel. The wrench was then connected to a 10k trimpot using adhesive-lined heat shrink — this trick is known as the ”poor man’s coupler:” a 3-wire ribbon connected the trimpot back to the locomotion controller. It worked well, but we had to keep the analog signal wire away from the power bus; otherwise, bad noise got into the ADC readings.
Chassis with the Batmobile raised to see the steering actuator
For future vehicles, we’re going to change this setup. It worked well enough, but once the bolt connected the actuator to the steering, you couldn’t drive the car; only the computer could. So rather than driving the car to the start line, we had to carry this 75lb beast. So painful. In the future, we plan to find a back-drivable actuator or maybe drive-by-wire.
Control Electronics – Displays
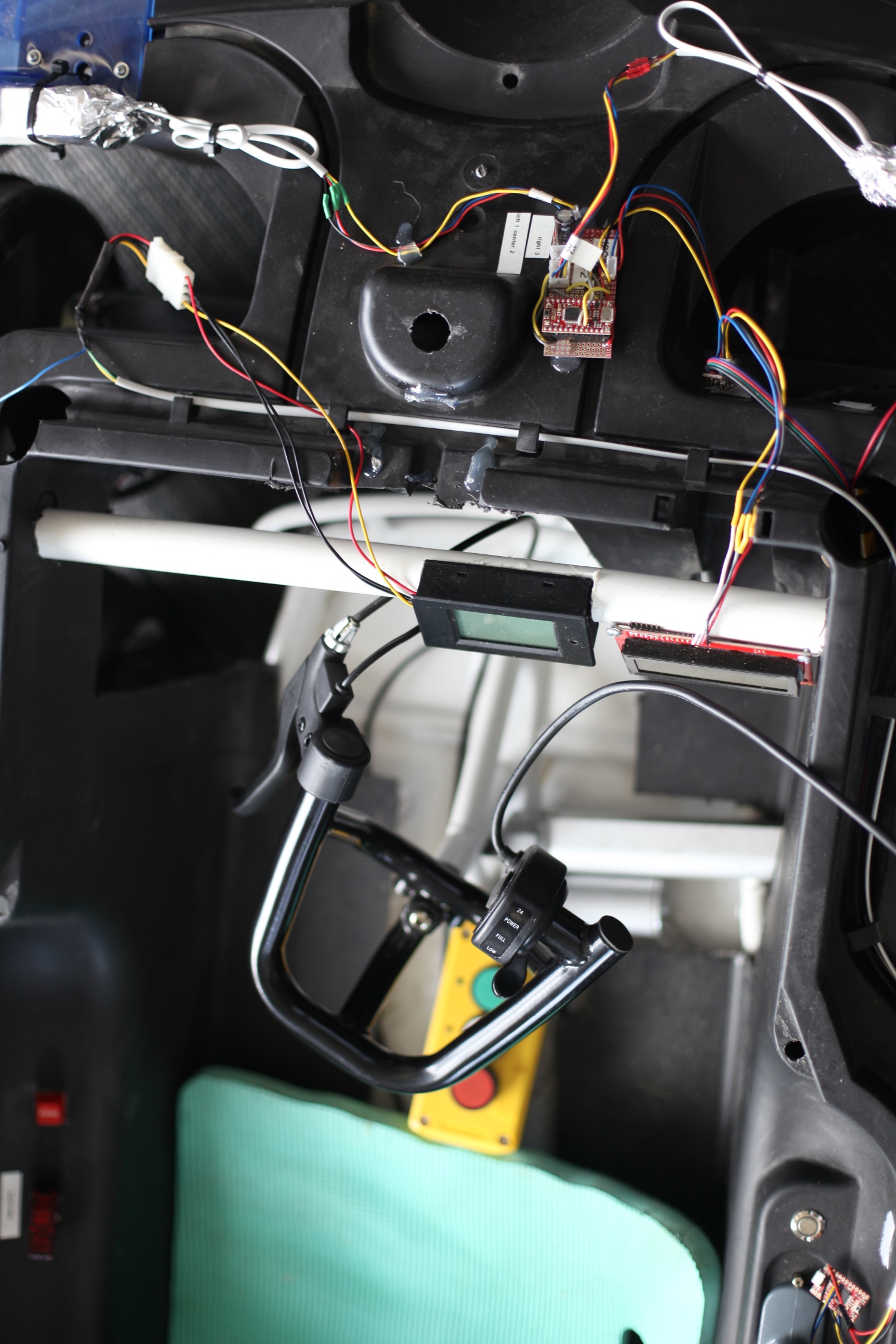
Throttle and displays
We cut notches in a 1” tube of PVC and mounted two displays in the Batmobile. The center display is the power meter. Nearly every A+PRS and PRS competitor used these super low-cost power meters to show the battery voltage. We had some issues with it, but it worked well enough. In the end, we noticed the drop in vehicle speed (indicating battery drain) long before we noticed the display was indicating a lower pack voltage. But, it did help us make decisions about when to pit (never!) because the nominal 48V pack voltage was dropping down to 42V where we could begin to damage the SLA.
The display on the right is the 20×4 character debug LCD. It’s basically a souped-up version of our 20×4 SerLCD display (it’s a prototype product, coming soon to a theater near you!).
Control Electronics – Sensors
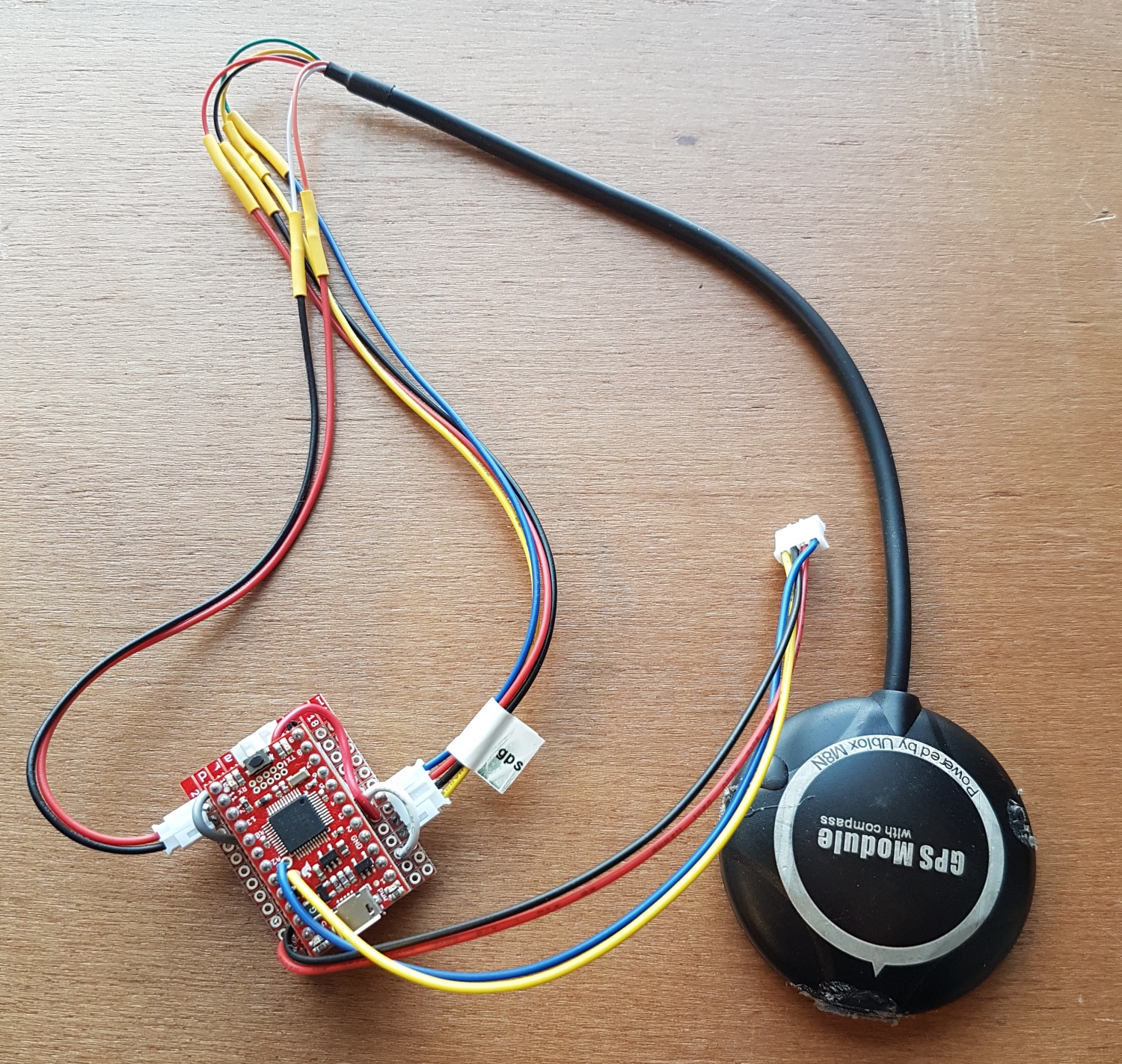
GPS+Compass connected to SAMD21
The Sensor Combinator is a SAMD21 Mini that monitors a GPS receiver and an I2C compass. We decided to use a SAMD21 because it can be configured to have multiple hardware serial and I2C ports. This is needed if you want to isolate I2C devices from the main bus. We wanted the Brain to ask for the heading and get the heading; the Sensor Combinator took care of the low-level I2C function of the compass and heading calculations. Similarly, the Combinator listened to the serial stream from the u-blox based GPS module and parsed out all the needed Latitude/Longitude/SIV information.
The code for the Sensor Combinator can be found here.
Control Electronics – Lasers
Laser tape measures seen on the front of the car, wrapped in foil
We hacked three laser tape measures in order to get distance to any objection front, left or right of the car. Laser tape measures are getting cheaper, and while the read rate (3Hz at the best of times) is not great for LIDAR, it’s fast enough for basic, low-cost autonomy.
Laser Controller at front of car
Unfortunately, the laser tape measures threw off enough RF to interfere with our GPS module, so we wrapped the lasers in foil. These sensors deserve their own tutorial, which will be written soon.
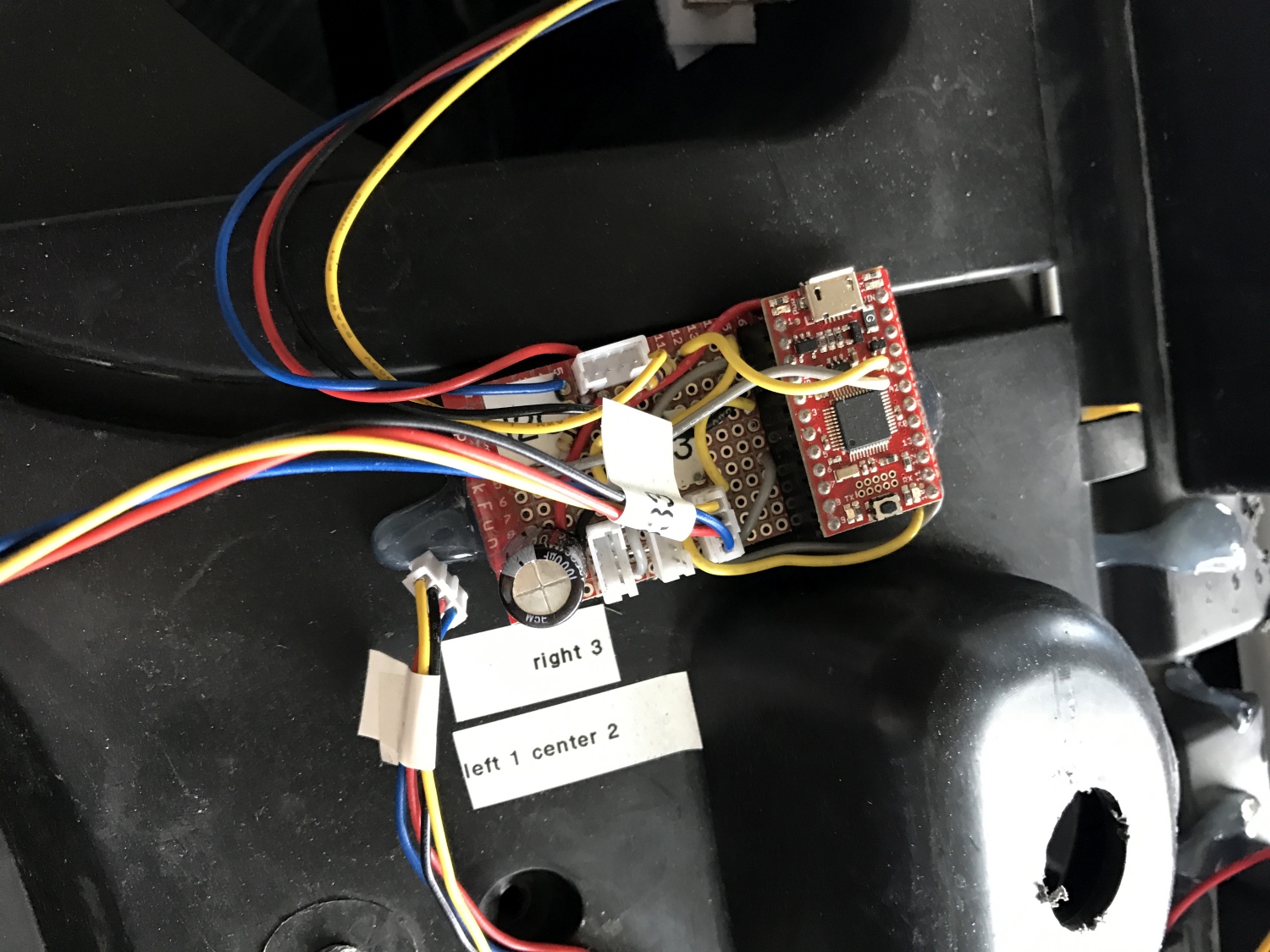
Laser Controller with labels
Again we chose the SAMD21 Mini to help us control and combine the serial information coming from the three sensors. The Laser Controller would send the pertinent control strings to the tape measures and monitor the responses, combining them into distances for left/right/center. The Brain would request these values from the Laser Controller over I2C.
Note the prodigious amounts of labels and polarized connectors (JSTs work great!). This system required lots of debugging but worked well because we were able to quickly disconnect and reconnect various aspects of the system.
The code for the Laser Controller can be found here.
Problems
As with any project, we had a large number of problems and hurdles to overcome along the way. Here are a few that really hurt.
** EMI and GPS **
The Laser tape measures caused significant interference with GPS reception. We eventually moved the GPS module to the rear of the car, which improved positional accuracy. However, the motor caused interference with the compass.
** DC Motor EMF **
DC motors produce a ton of electromagnetic noise. We originally had the 48V battery powering the entire car. However, when the motor would kick on, it would cause enough ripple to make the Brain glitch and reset. We tried powering the I2C bus separately, but, because the Locomotion Controller needed to be attached to the motor controller, a GND connection had to be shared. The noise eventually found its way over the I2C bus. In the future we will optically isolate the I2C bus.
** Lack of EEPROM **
Because the SAMD21 doesn’t have internal EEPROM, we were unable to store GPS waypoints on the board. We fixed this by using an I2C-based EEPROM.
** Switching Steering Between Driver/Driverless **
It was difficult to attach and detach the linear actuator from the rack and pinion steering. Once the actuator was attached to the steering, a driver could not actively steer (for example, to the starting line). This could be fixed with a different actuator that could be back-driven, or we could go full monty and detach the steering column from the steering and have it control a trimpot that, in turn, controls the linear actuator (drive by wire).
Tips / Best Practices
Tip 1) Start early — These vehicles take a large amount of time. Get together with friends and start hacking. It’s a great labor of love, and drifting in a 15mph go-kart will make you giggle.
Tip 2) Get reverse — Get a motor controller with reverse. It will make it so you can drive your car where you want it instead of carrying your car where you need it.
Tip 3) Use connectors! — I’ve written about using connectors a few times. Use polarized connectors and a label maker to make it clear what plugs in where.
Tip 4) Size your motor and motor controller correctly — We blew our motor controller because it was underrated. A friend of ours smoked his motor because he was pushing too much current. Pick your system voltage and current, and then double the ratings wherever you can.
Tip 5) Beware of interference — These vehicles can pull 30 amps or more when accelerating, which can cause large electromagnetic fields. Keep unshielded cables and sensitive sensors away from power wires.
Tip 6) Wireless control and sensor logging — After you pick up your 75lb vehicle and drag it to the start line for the fifth time, you’ll understand the need for remote control. Create a wireless system that allows you to take over control of the vehicle from afar so you can drive it where you need it. And transmit the sensor data so you can see what the vehicle is doing.
Från bildigenkänning till artificiell bildgenerering. AI-forskningen och utvecklingen inom maskininlärning (machine learning), när det handlar om bilder och foton, har i huvudsak handlat om artificiell bildigenkänning. Dvs att skapa algoritmer för att lära datorer att känna igen visuella objekt i bilder och tolka det som syns och sker i foton. (engelska: Image recognition, object detection, object classification)
De senaste åren har även AI:s förmåga att skapa (generera) falska fotorealistiska bilder tagit stora kliv framåt. På webbplatsen, ThisPersonDoesNotExist.com, kan du se själv med egna ögon hur långt utvecklingen kommit.
Dessa personer finns inte på riktigt. Ansiktena har skapats av AI-algoritmen StyleGAN på webbplatsen ThisPersonDoesNotExist.com
Webbplatsen är skapad av Phillip Wang, en fd programvaruingenjör vid Uber, och skapar automatiskt nya bilder på människors ansikten som inte finns på riktigt. Algoritmen bakom den bygger på forskning som släpptes förra året av grafikchipdesignern Nvidia. AI:t är tränat på ett enormt stort dataset med foton på riktiga människoansikten, och använder sedan en typ av neuralt nätverk som kallas ett Generativt Adversarialt Nätverk (engelska Generative Adversarial Network, GAN) för att tillverka nya falska människoporträtt.
”Varje gång du läser in webbsidan skapar nätverket en ny ansiktsbild från början,” skrev Wang i ett Facebook-inlägg. ”De flesta förstår inte hur bra AI:er kommer att vara på att syntetisera bilder i framtiden.”
Den underliggande AI-algoritmen som drivs på webbplatsen uppfanns ursprungligen av en forskare som heter Ian Goodfellow. Nvidias AI-algoritm, kallat StyleGAN, gjordes nyligen till öppen källkod och har visat sig vara otroligt flexibel. Även om den här versionen av modellen är tränad för att generera mänskliga ansikten, kan den i teorin användas för att efterlikna någon annan källa. Forskare experimenterar redan med andra mål, som t e x anime tecken, teckensnitt och graffiti.
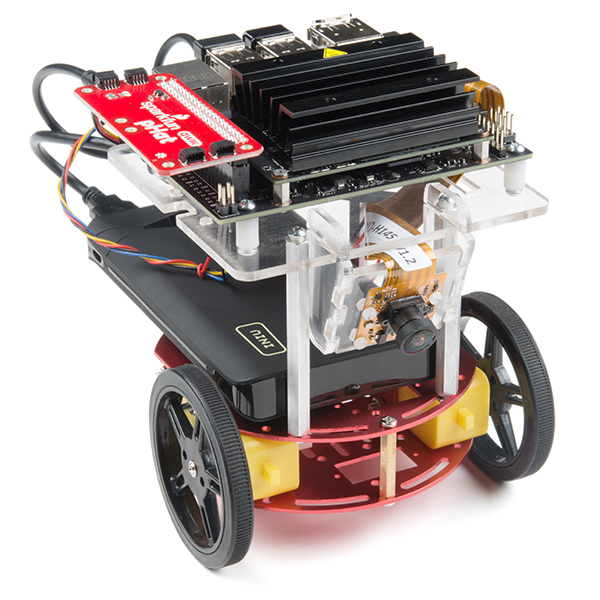
SparkFun’s version of the JetBot merges the industry leading machine learning capabilities of the NVIDIA Jetson Nano with the vast SparkFun ecosystem of sensors and accessories. Packaged as a ready to assemble robotics platform, the SparkFun JetBot Kit requires no additional components or 3D printing to get started – just assemble the robot, boot up the Jetson Nano, connect to WiFi and start using the JetBot immediately. This combination of advanced technologies in a ready-to-assemble package makes the SparkFun JetBot Kit a standout, delivering one of the strongest robotics platforms on the market. This guide serves as hardware assembly instructions for the two kits that SparkFun sells; Jetbot including Jetson Nano & the Jetbot add-on kit without the NVIDIA Jetson Nano. The SparkFun JetBot comes with a pre-flashed micro SD card image that includes the Nvidia JetBot base image with additional installations of the SparkFun Qwiic Python library, Edimax WiFi driver, Amazon Greengrass, and the JetBot ROS. Users only need to plug in the SD card and set up the WiFi connection to get started.
Note: We recommend that you read all of the directions first, before building your Jetbot. However, we empathize if you are just here for the pictures & a general feel for the SparkFun Jetbot. We are also those people who on occasion void warranties & recycle unopened instructions manuals. However, SparkFun can only provide support for the instructions laid out in the following pages.
Attention: The SD card in this kit comes pre-flashed to work with our hardware and has the all the modules installed (including the sample machine learning models needed for the collision avoidance and object following examples). The only software procedures needed to get your Jetbot running are steps 2-4 from the Nvidia instructions (i.e. setup the WiFi connection and then connect to the Jetbot using a browser). Please DO NOT format or flash a new image on the SD card; otherwise, you will need to flash our image back onto the card.
If you accidentally make this mistake, don’t worry. You can find instructions for re-flashing our image back onto the SD card in the software section of the guide
The Jetson Nano Developer Kit offers extensibility through an industry standard GPIO header and associated programming capabilities like the Jetson GPIO Python library. Building off this capability, the SparkFun kit includes the SparkFun Qwiic pHat for Raspberry Pi, enabling immediate access to the extensive SparkFun Qwiic ecosystem from within the Jetson Nano environment, which makes it easy to integrate more than 30 sensors (no soldering and daisy-chainable).
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
Materials
The SparkFun Jetbot Kit contains the following pieces; roughly top to bottom, left to right.
Part
Qty
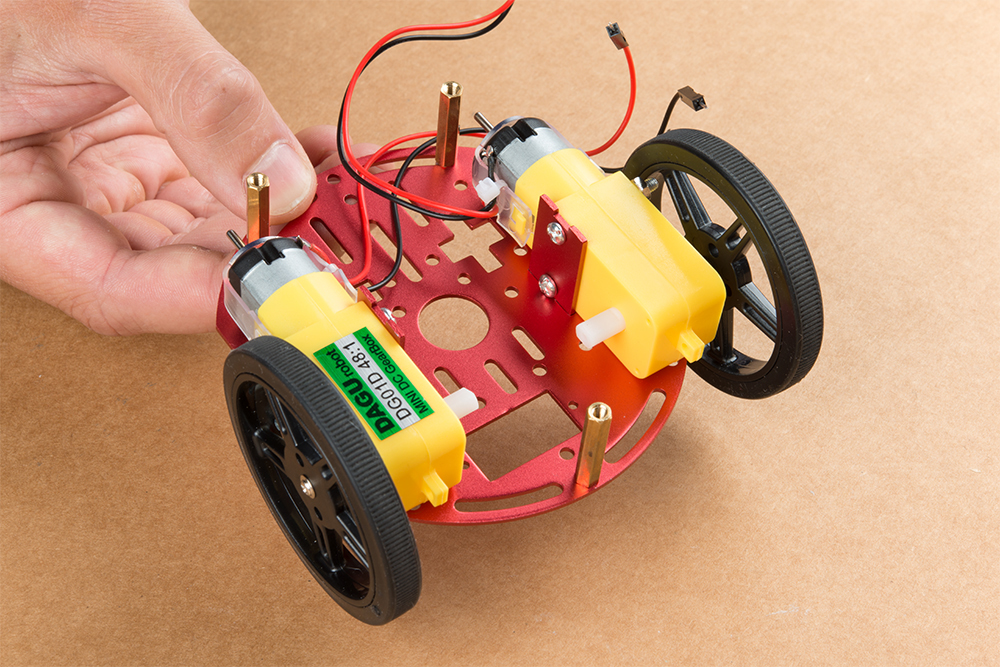
Circular Robotics Chassis Kit (Two-Layer)
1
Lithium Ion Battery Pack – 10Ah (3A/1A USB Ports)
1
Ball Caster Metal – 3/8″
1
Edimax 2-in-1 WiFi and Bluetooth 4.0 Adapter
1
Header – male – PTH – 40 pin – straight
1
2 in – 22 gauge solid core hookup wire (red)
1
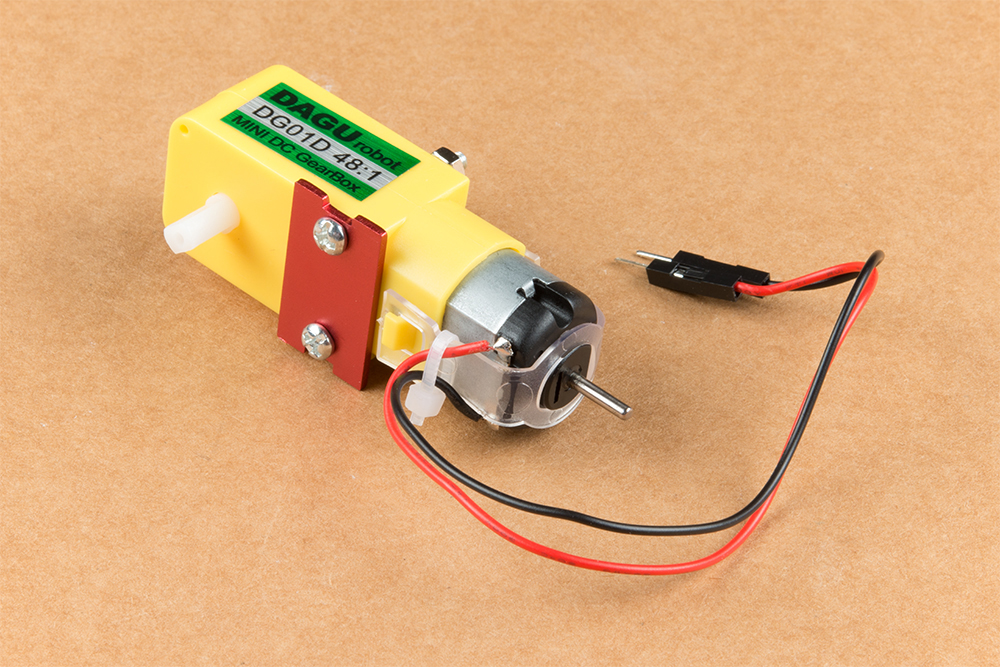
Shadow Chassis Motor (pair)
1
Jetson Dev Kit (Optional)
1
SparkFun JetBot Acrylic Mounting Plate
1
SparkFun Jetbot image (Pre Flashed)
1
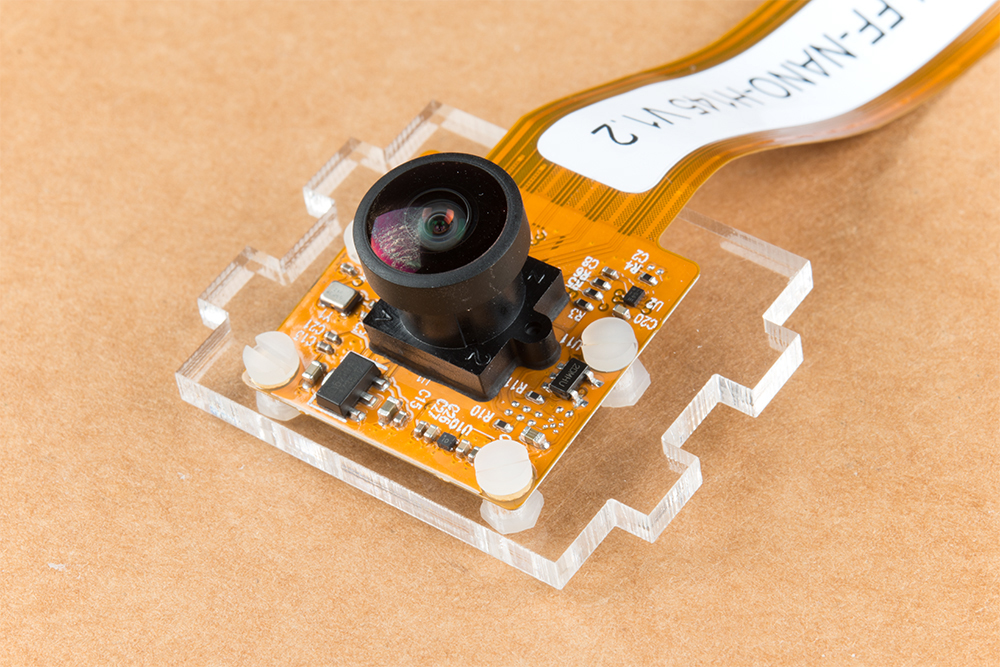
Leopard Imaging 145 FOV Camera
1
Screw Terminals 2.54mm Pitch (2-Pin)
2
SparkFun Micro OLED Breakout (Qwiic)
1
SparkFun microB USB Breakout
1
SparkFun Serial Controlled Motor Driver
1
Breadboard Mini Self-Adhesive Red
1
SparkFun Qwiic HAT for Raspberry Pi
1
SparkFun JetBot Acrylic sidewall for camera mount
2
SparkFun JetBot Acrylic Camera mount & 4x nylon mounting hardware
1
Qwiic Cable – 100mm
1
Qwiic Cable – Female Jumper (4-pin)
1
Wheels & Tires – included as part of circular robotics chassis
2
USB Micro-B Cable – 6″
2
Dual Lock Velcro
1
The SparkFun Jetbot Kit contains the following hardware; roughly top to bottom, left to right.
We did not include any tools in this kit because if you are like us you are looking for an excuse to use the tools you have more than needing new tools to work on your projects. That said, the following tools will be required to assemble your SparkFun Jetbot.
Small phillips & small flat head head screwdriver will be needed for chassis assembly & to tighten the screw terminal connections for each motor. We reccomend the Pocket Screwdriver Set; TOL-12268.
Pair of scissors will be needed to cut the adhesive Dual Lock Velcro strap to desired size; recommended, but not essential..
Soldering kit for assembly & configuration of the SparkFun Serial Controlled Motor Driver – example TOL-14681
Optional– adjustable wrench or pliers to hold small components (nuts & standoffs) in place while tightening screws; your finger grip is usually enough to hold these in place while tightening screws & helps to ensure nothing is over tightened.A Note About Directions
When we talk about the ”front,” or ”forward” of the JetBot, we are referring to direction the camera is pointed when the Jetbot is fully assembled. ”Left” and ”Right” will be from the perspective of the SparkFun Jetbot.
If you prefer to follow along with a video, check out this feature from the chassis product page. You do not need to use the included ball caster as a larger option has been provided for smoother operation.
Start by attaching the chassis motor mount tabs to each of the ”Shadow Chassis Motors (pair)” using the long threaded machine screws & nuts included with the Circular Robotics Chassis Kit.
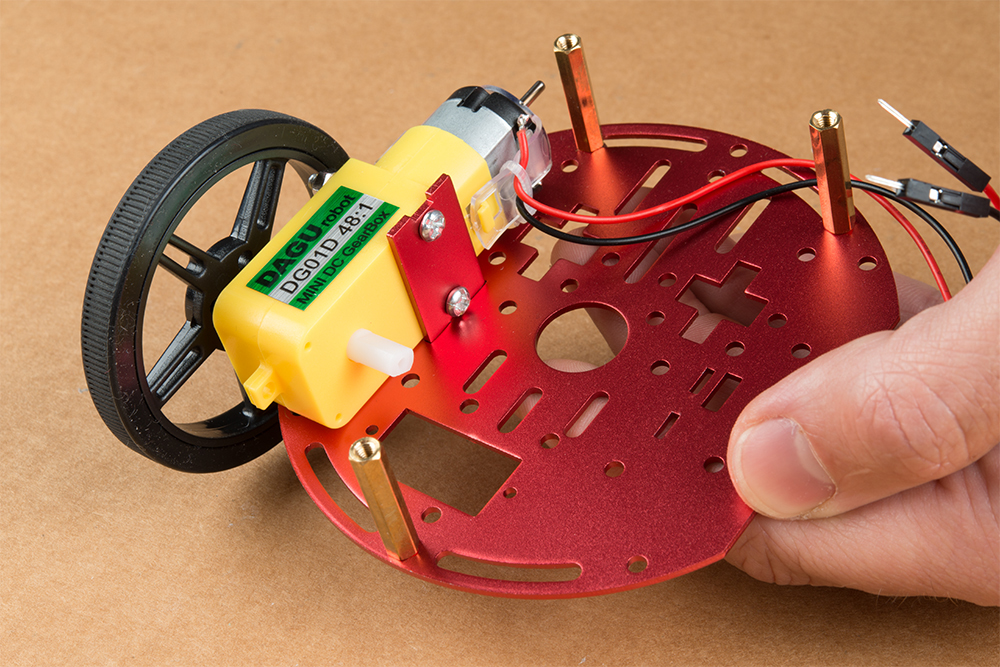
Fit the rubber wheels onto the hubs, install the wheel onto each motor, & fix them into position using the self tapping screws included with the Circular Robotics Chassis Kit.
Install the brass colored standoffs included with the Circular Robotics Chassis Kit; two in the rear and one in the front. The rear of the SparkFun Jetbot will be on the side of the plate with the two ”+” sign cut outs. The rear of the motor will be opposite the wheel where the spindle extends. This orientation ensures the widest base & most stable set up for your Jetbot.
The motor mounts fit into two mirrored inlets in each base plate as shown. Install the motors opposite of one another.
Depending on how you install the motor mounts to each motor will dictate how the motor can be installed on the base plate. Note: Do not worry about the motor orientation as you will determine proper motor operation in how you connect the motor leads to the SparkFun Serial Controlled Motor Driver. Notice how in the picture below one motor has the label facing up, while the other has the label facing down.
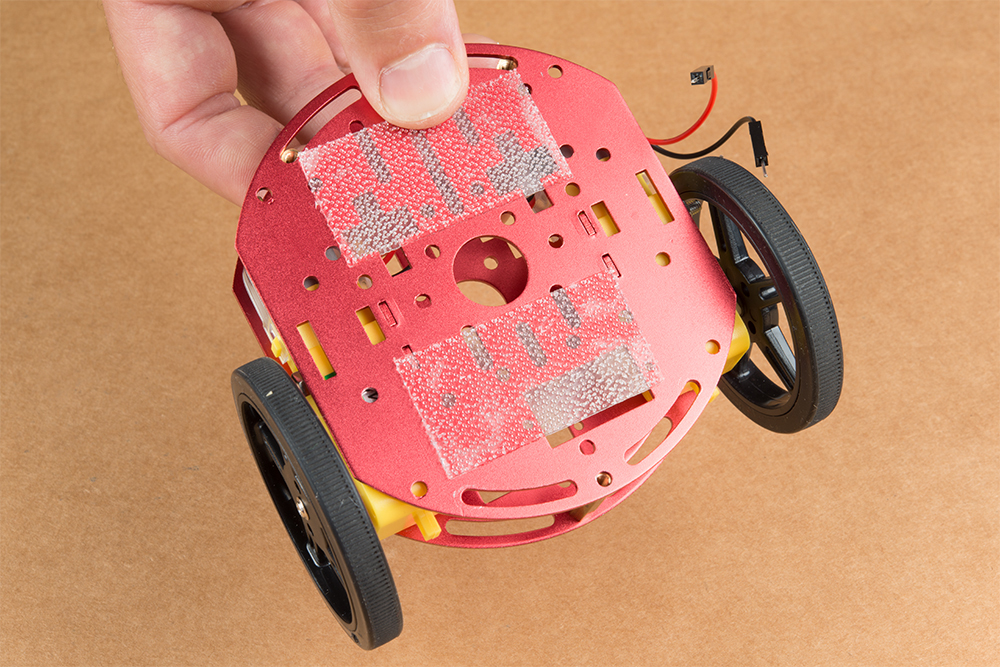
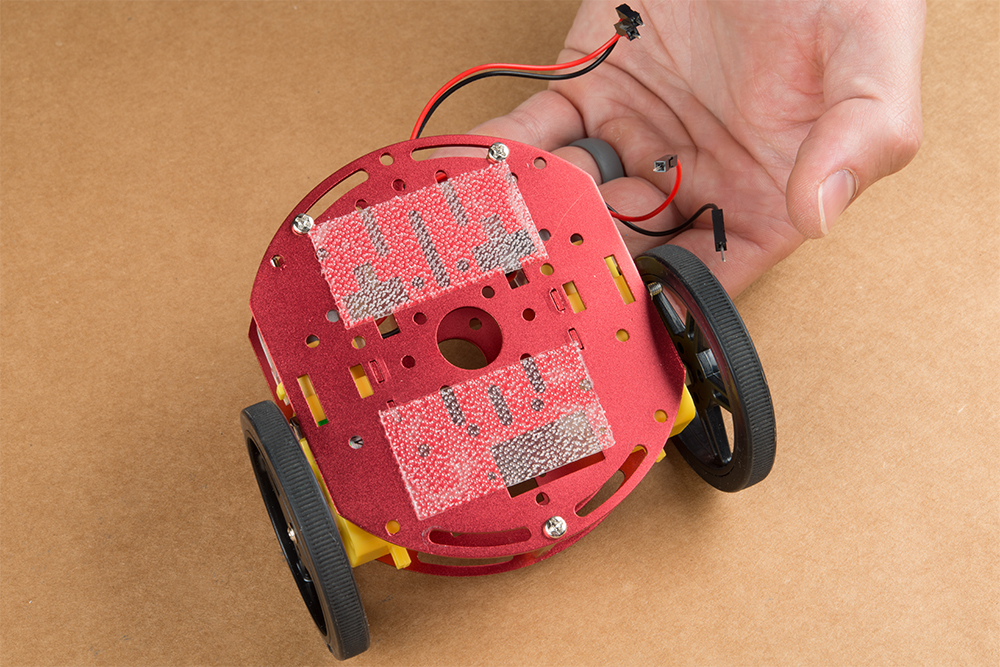
Place the other circular robot chassis plate on top of and align the two ”+” and the motor mount tab recesses. Hold the sandwiched chassis together with one hand and install the remaining Phillips head screws included with the Circular Robotics Chassis Kit through the top plate & into the threaded standoffs.
Your main chassis is now assembled! The Circular Robotics Chassis Kit also contains a very small caster wheel assembly, but we have included a larger metal caster ball to increase the stability of the SparkFun Jetbot. We will cover the installation of this caster ball later in the tutorial.
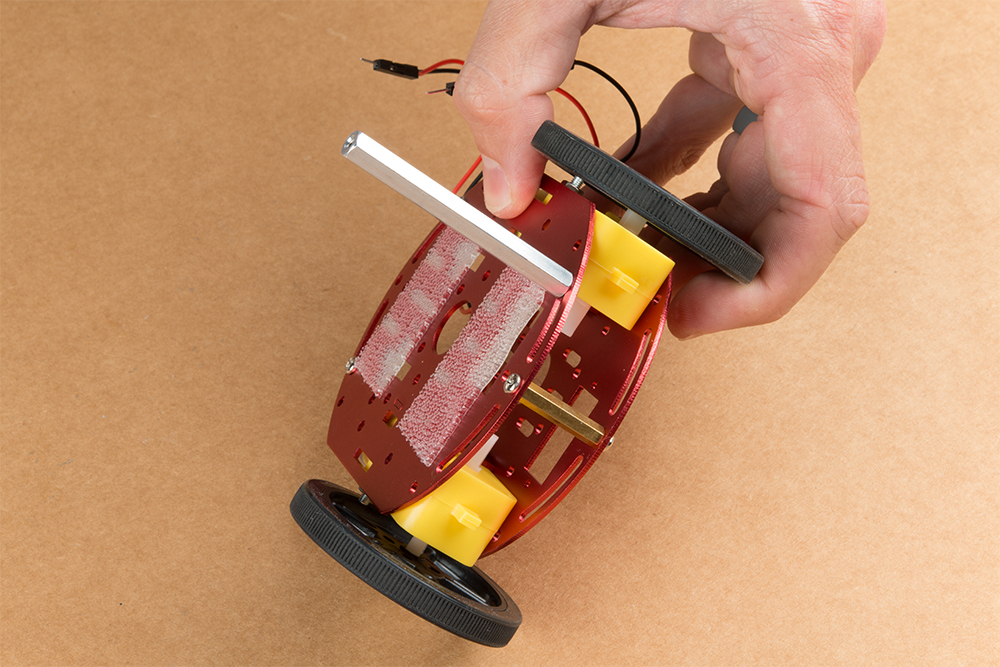
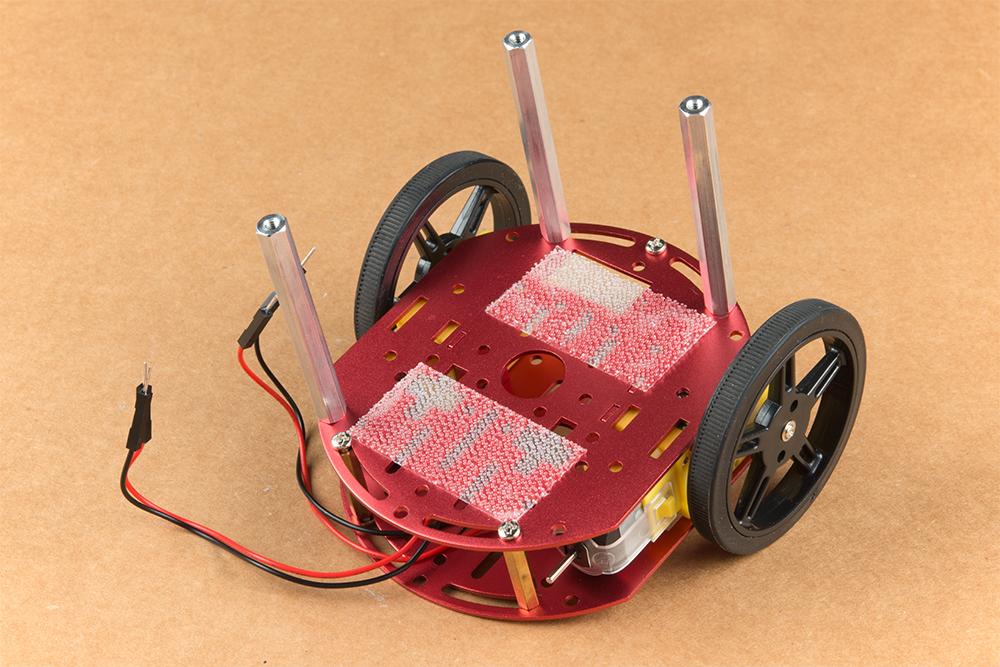
Utilize three of the included 1/4 in 4-40 Phillips Screws through the top chassis plate with threads facing up & install the 2-3/8 in #4-40 Aluminum Hex Standoff until they are finger tight.
The aluminum stand offs should be pointing up as shown below.
The SparkFun JetBot acrylic mounting plate is designed to have two of these aluminum standoffs in the front & one in the rear. We recommend the rear standoff on the left side of the chassis (as shown) so the 6 in microB usb cables that will be installed later can more easily span the gap needed to power the JetBot.
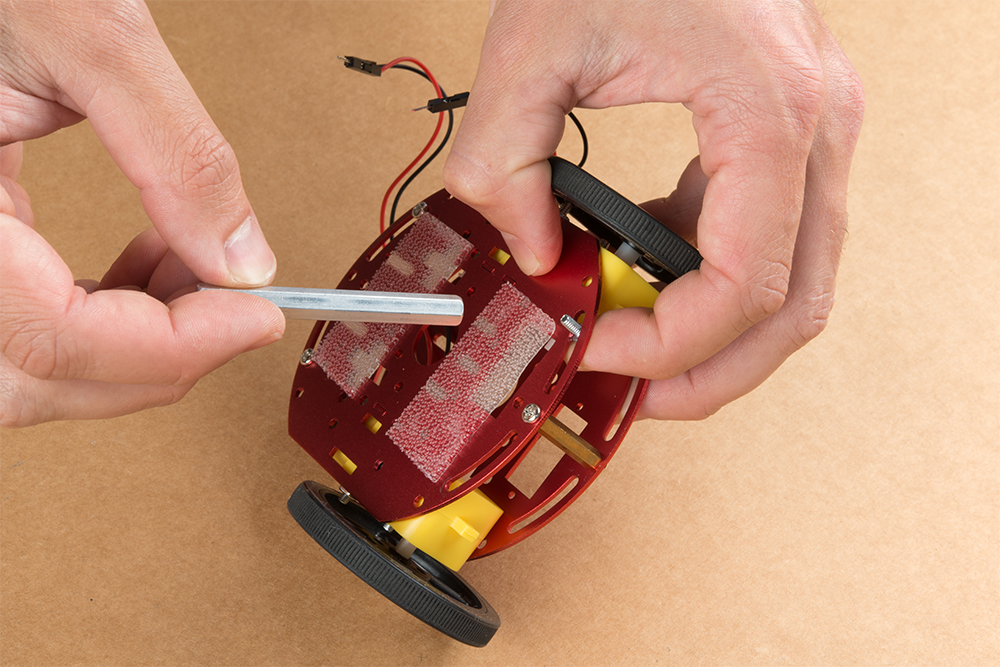
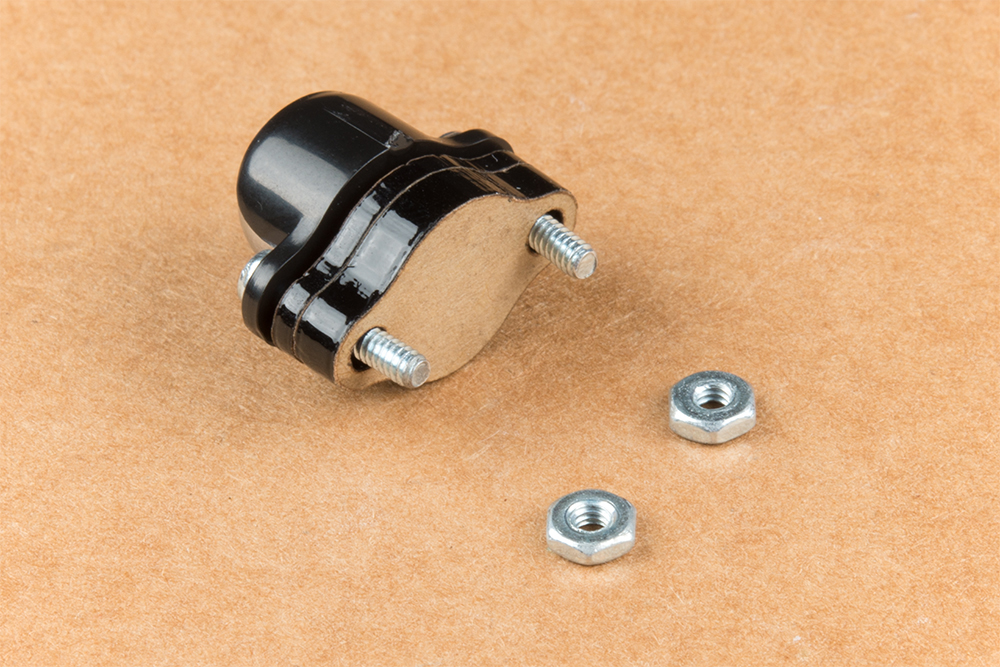
Un-package the 3/8 in Metal Caster Ball and thread the mounting screws through all pieces as shown. Note the full stack height will help balance the Jetbot in a stable position.
Install the caster wheel using the Phillips head screws and nuts included with the 3/8 in caster ball assembly. The holes on the caster assembly are spaced to fit snug on the innermost segment of the angular slots near the rear of the lower plate on the JetBot chassis. Again, hand tight is just fine. Note: if you over tighten these screws it will prevent the ball from easily rotating in the plastic assembly. However, too loose and it may un-thread; go for what feels right
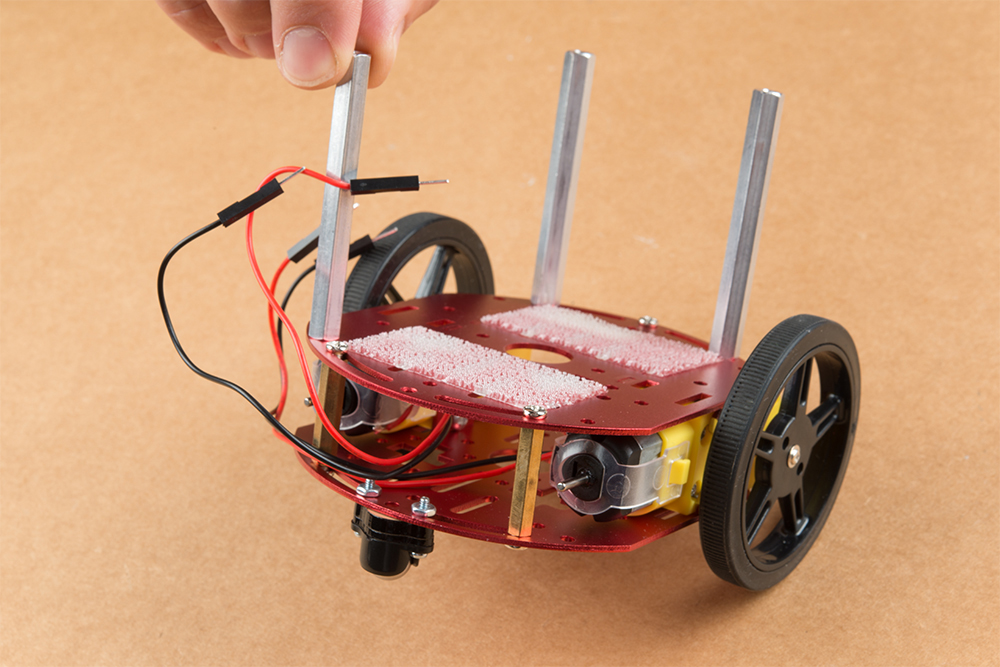
After you have installed the caster & aluminum standoffs, thread the motor wires through the back of the chassis standoffs for use later.
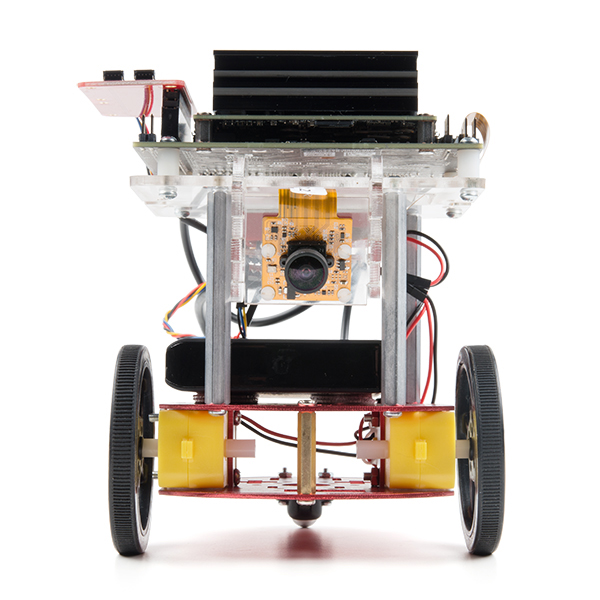
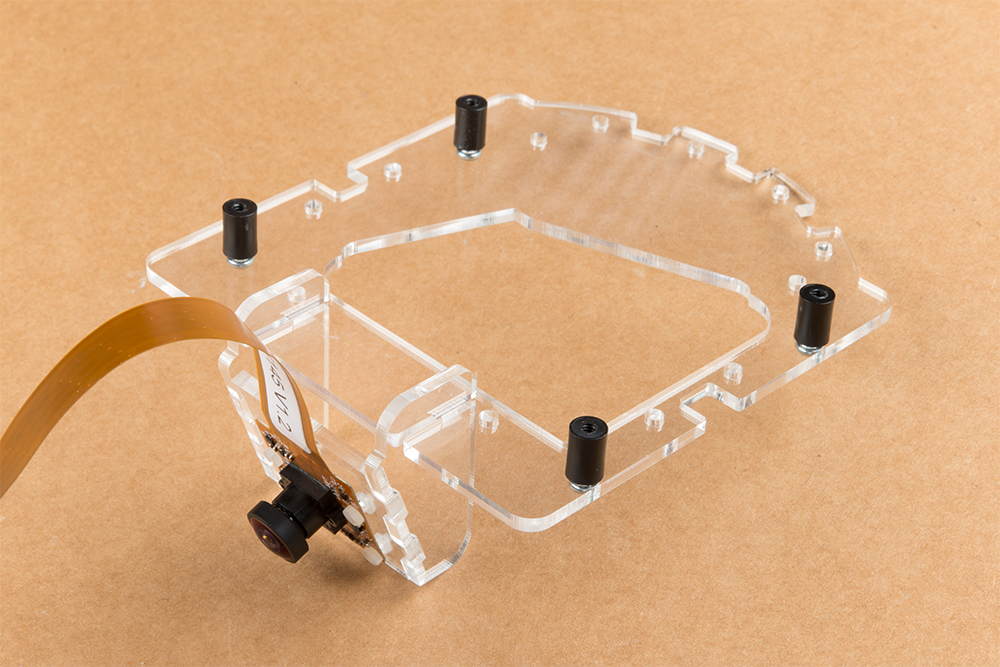
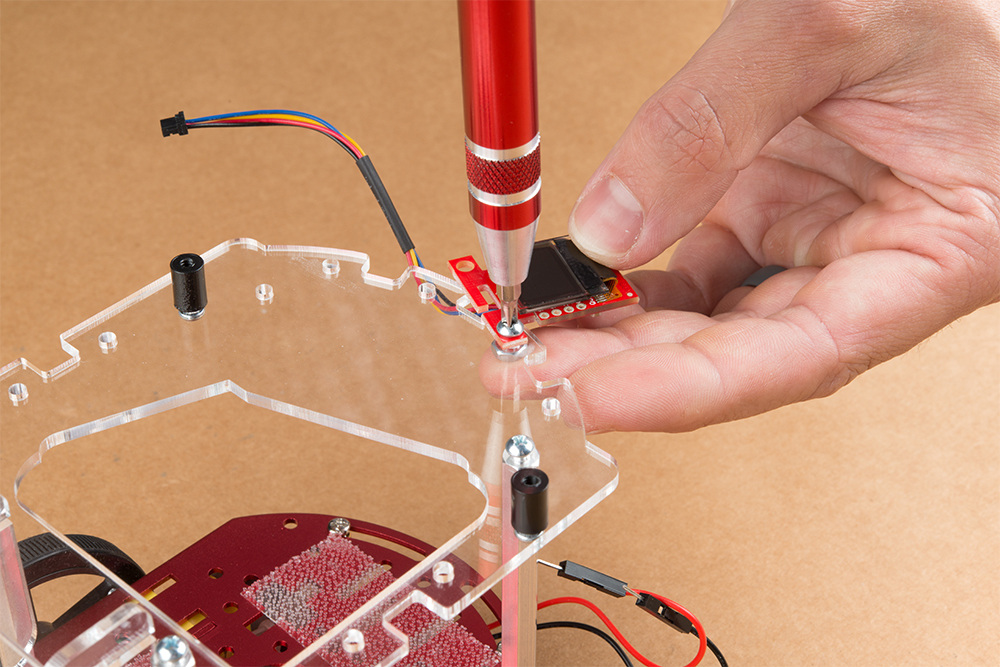
2. Camera Assembly & Installation
Unpackage the Leopard Imaging camera & align the four holes in the acrylic mounting plate with those on the camera.
Note: ensure that the ribbon cable is extending over the acrylic plate on the edge that does not have mounting holes near the edge; as shown below.
Place all four nylon flathead screws through the camera & acrylic mounting plate prior to fully tightening the nylon nuts. This will ensure equal alignment across all four screws. Tighten the screws while holding the nuts with finger pressure in a rotating criss cross pattern; similar to how you tighten lug nuts on a car rim.
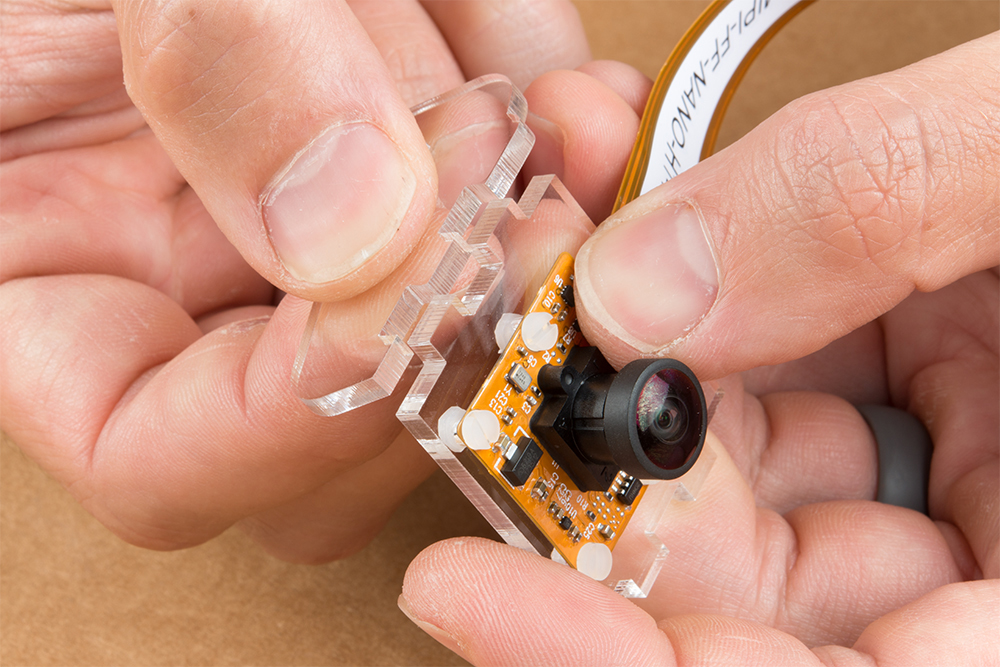
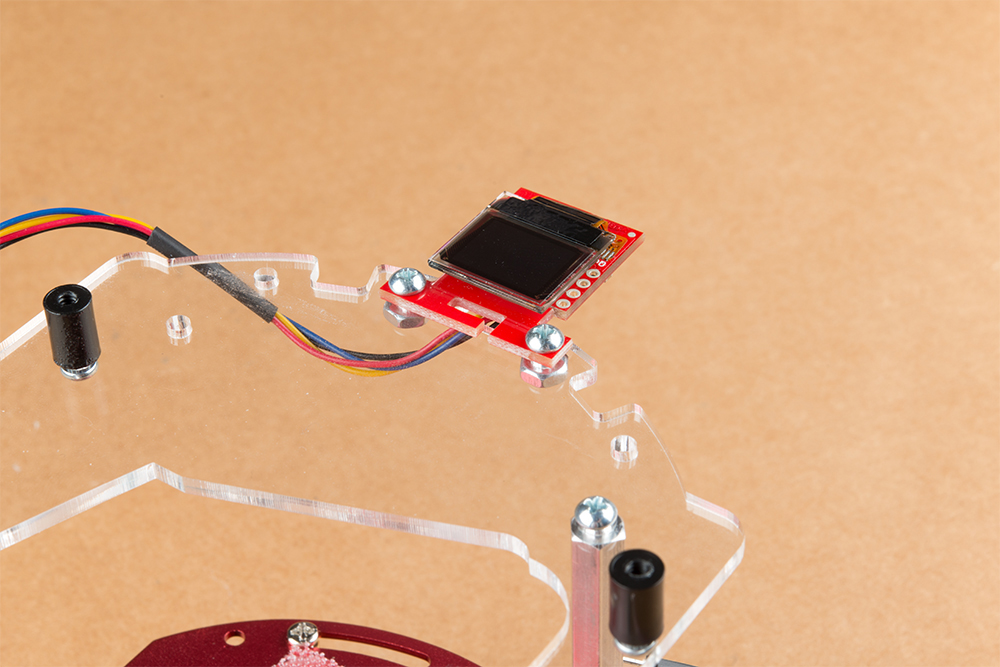
Align one acrylic sidewall with the camera mounting plate as shown below ensuring that the widest section of the sidewall is oriented to the top of the camera mount where the ribbon cable extends.
Apply even pressure on each piece until they fit together. Note: these pieces are designed to have an interference fit and will have a nice, satisfying ”click” when they fit together.
Repeat this process on the other side to fully assemble the camera mount.
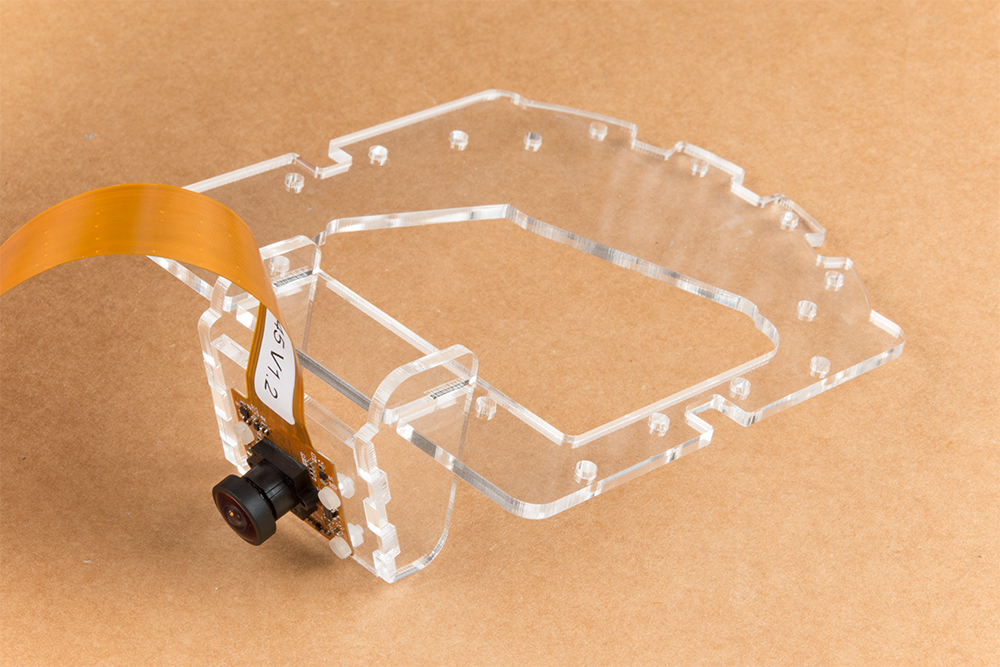
The camera mount should now be installed to the SparkFun Jetbot acrylic mounting plate using the overlapping groove joints. Ensure that the cut out on the acrylic mounting plate is facing towards the front/right of the Jetbot as shown. This will ensure that there is plenty of room for the camera ribbon cable to pass around the assembly and up to the Jetson nano camera connector.
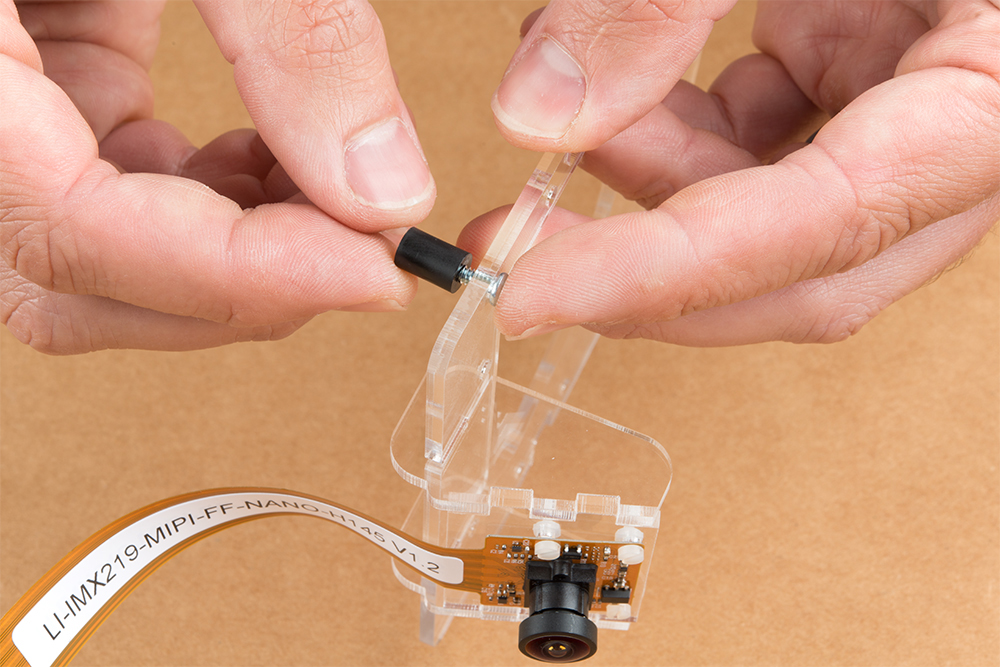
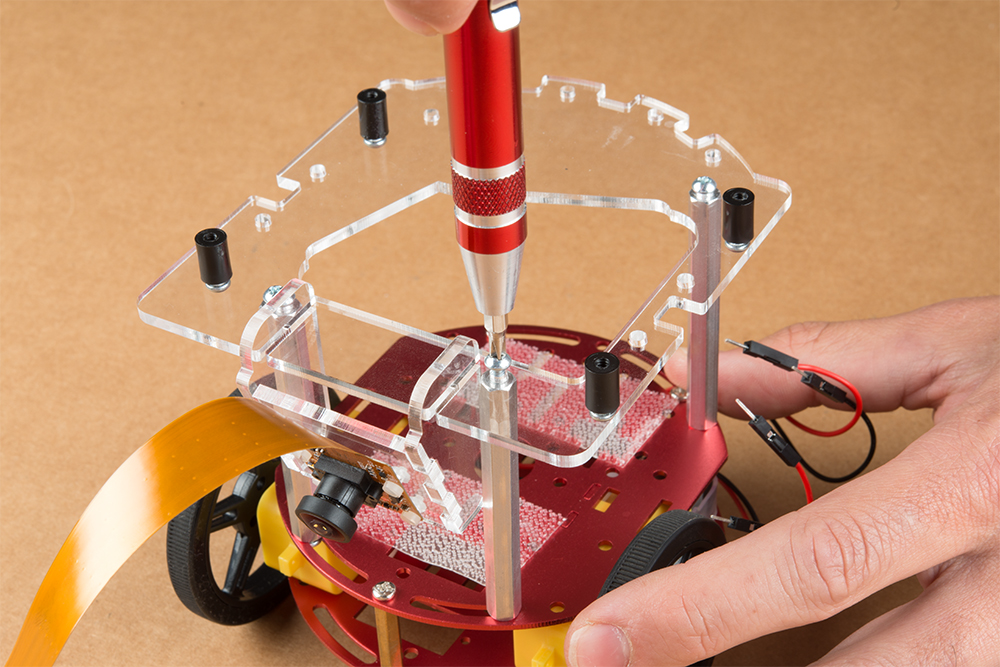
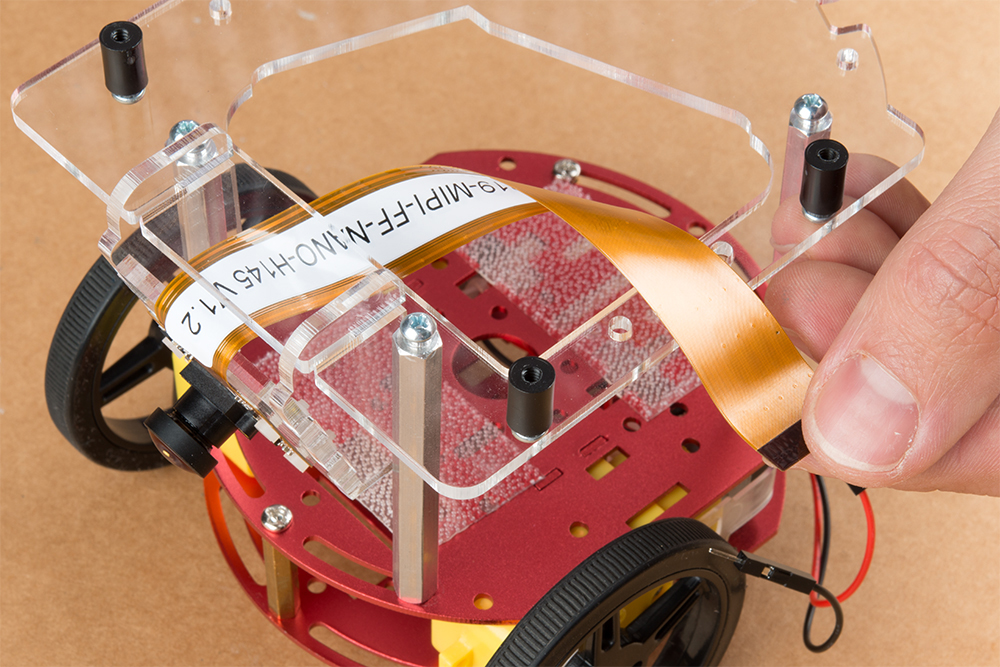
Install four of the nylon standoffs to the top of the SparkFun Jetbot acrylic mounting plate using four of the included 1/4 in 4-40 Phillips head screws as shown below.
Utilize three more of the 1/4 in 4-40 Phillips head screws to install the SparkFun Jetbot acrylic mounting plate to the aluminum standoffs extending from the Two-layer circular robotics chassis as shown below.
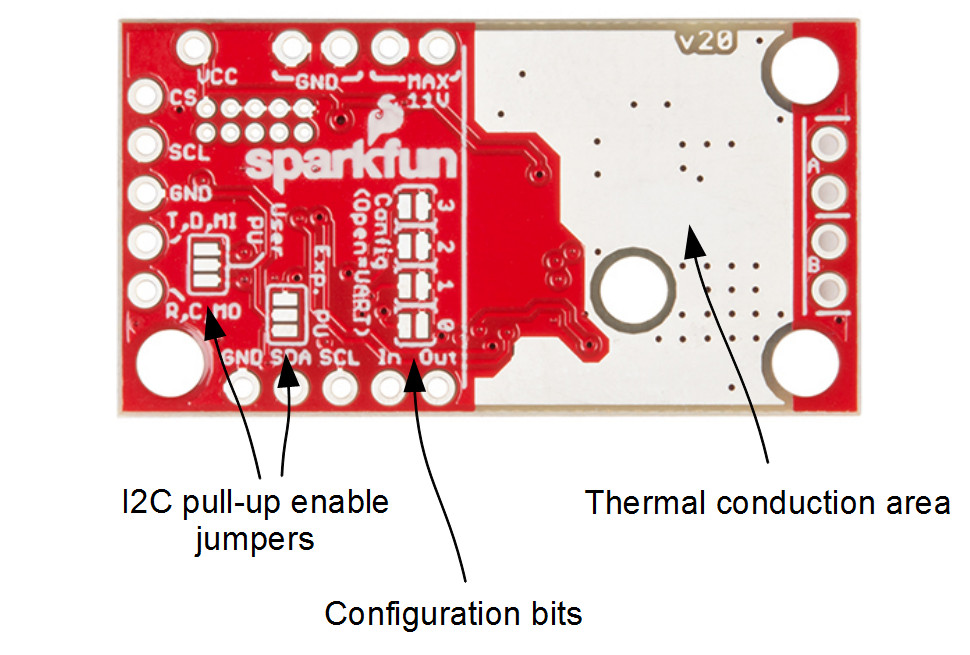
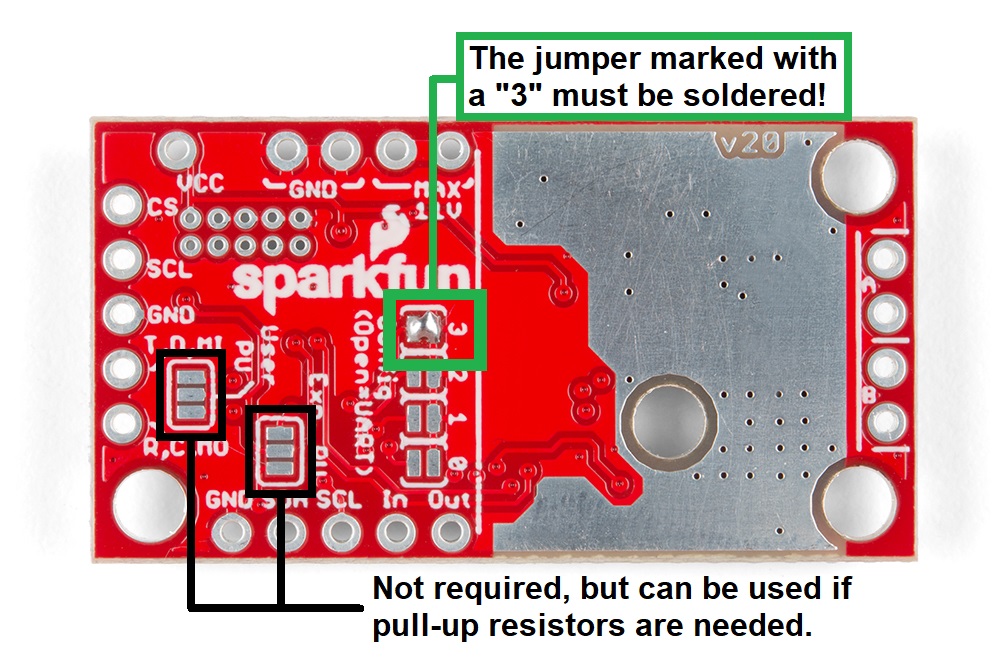
You will need to solder both triple jumpers labeled below as ”I2C pull-up enable jumpers” as the SparkFun pHat utilizes the I2C protocol. The default I2C address that is used by the pre-flashed SparkFun Jetbot image is 0x5D which is equavalent to soldering pad #3 noted as ”configuration bits” on the back of the SparkFun serial controlled motor driver; see below. You will need to create a solder jumper on pad #3 only for the SparkFun Jetbot Image to work properly.
Layout of jumpers on the Serial Controlled Motor Driver.
Jumper 3 of theConfiguration Bitsproperly soldered.
Your completed Serial Controlled motor drive should look somewhat similar to the board shown below.
The 2-pin screw terminals are soldered to the ”Motor Connections.”
Break off 4 Male PTH straight headers and solder into the ”Power (VIN) connection” points.
Break off 5 Male PTH straight headers and solder into the ”Expansion port” points. These will not be used, but will provide additional board stability when installed into the mini breadboard.
Break off 5 Male PTH straight headers and solder into the ”User port” points for connection into the included Female Jumper Qwiic cables.
Break off 5 Male PTH straight headers and solder into the breakout points on the SparkFun microB USB Breakout.
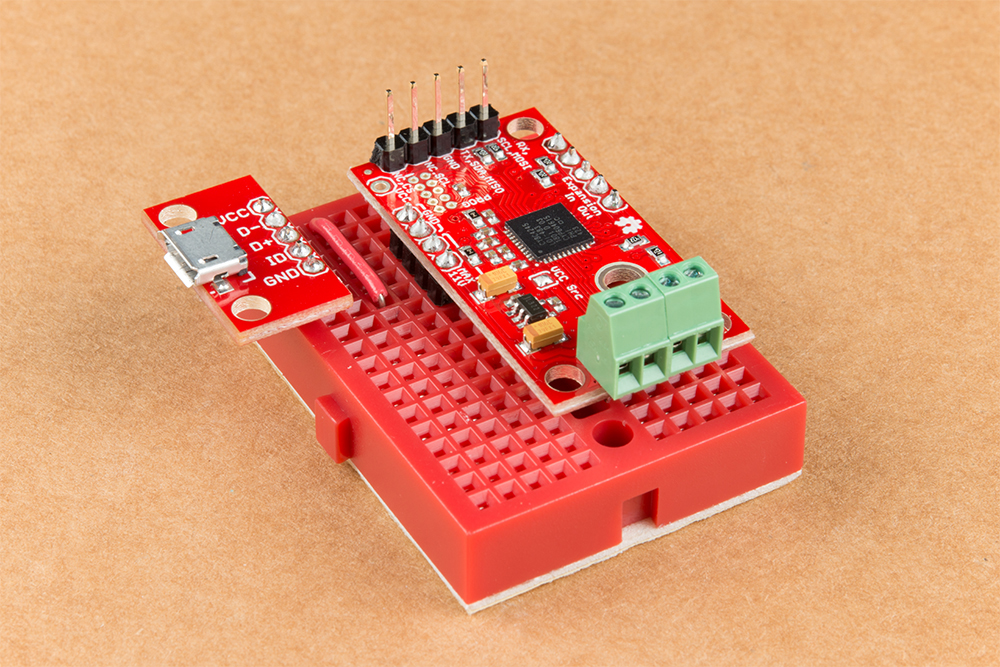
Install both the SparkFun Serial Controlled Motor Driver & the SparkFun microB Breakout board on the included mini breadboard so the ”GRD” terminals for each unit share a bridge on one side of the breadboard.
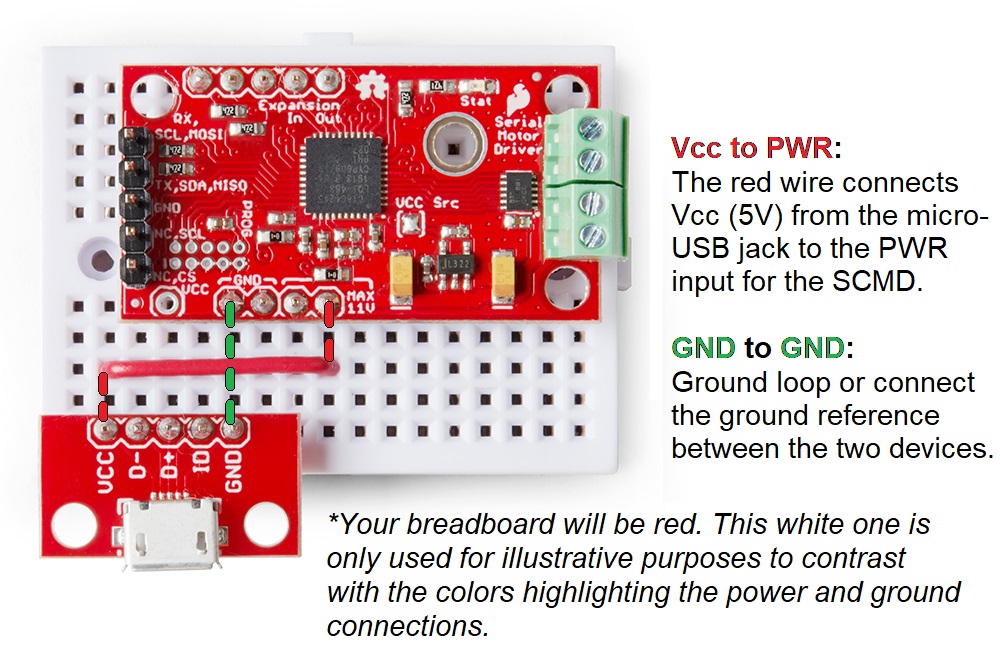
Utilize the included 2 in – 22 gauge solid core hookup wire (red) to bridge the ”VCC” pin for the SparkFun microB Breakout to either (VIN) connection point on the SparkFun Serial Controlled Motor Driver as shown below.
Required power connections between the micro-USB breakout and the Serial Controlled Motor Driver.
Competed assembly of the micro-USB breakout and Serial Controlled Motor Driver on the breadboard.
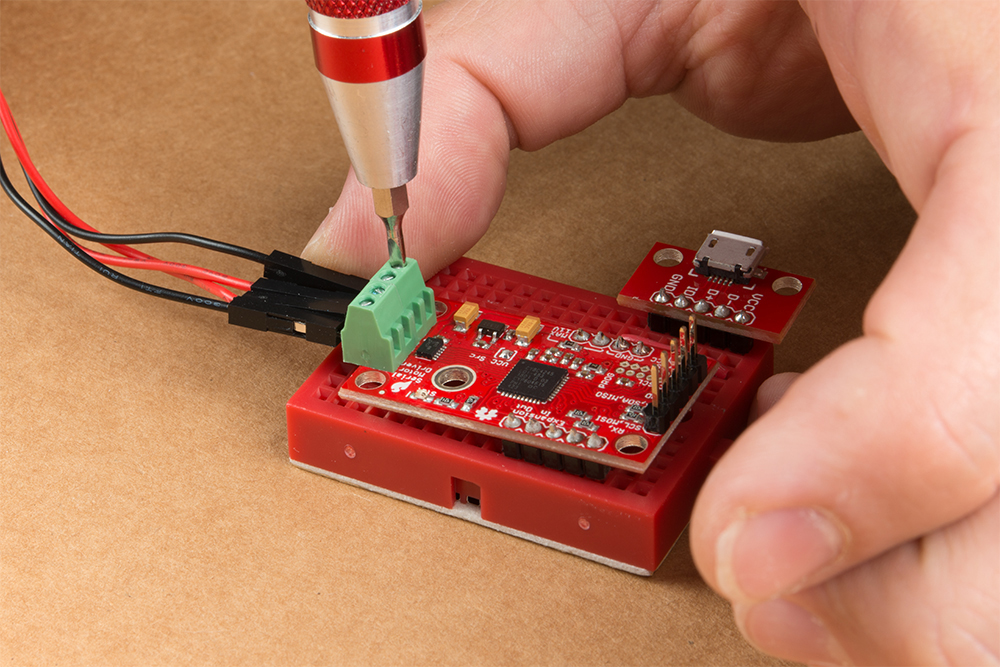
Utilize a small flat head screwdriver to loosen the four connection points on the screw terminals. When inserting the motor connection wires, note the desired output given the caution noted in section #1 of this assembly guide.
Note from section #1: Do not worry about the motor orientation as you will determine proper motor operation in how you connect the motor leads to the SparkFun Serial Controlled Motor Driver.
These connection points can be corrected when testing the robot functionality. If your Jetbot goes straight when you expect Jetbot to turn or vice versa, your leads need to be corrected.
Set this assembly aside for full installation later.
4. Accessory Installation to Main Chassis
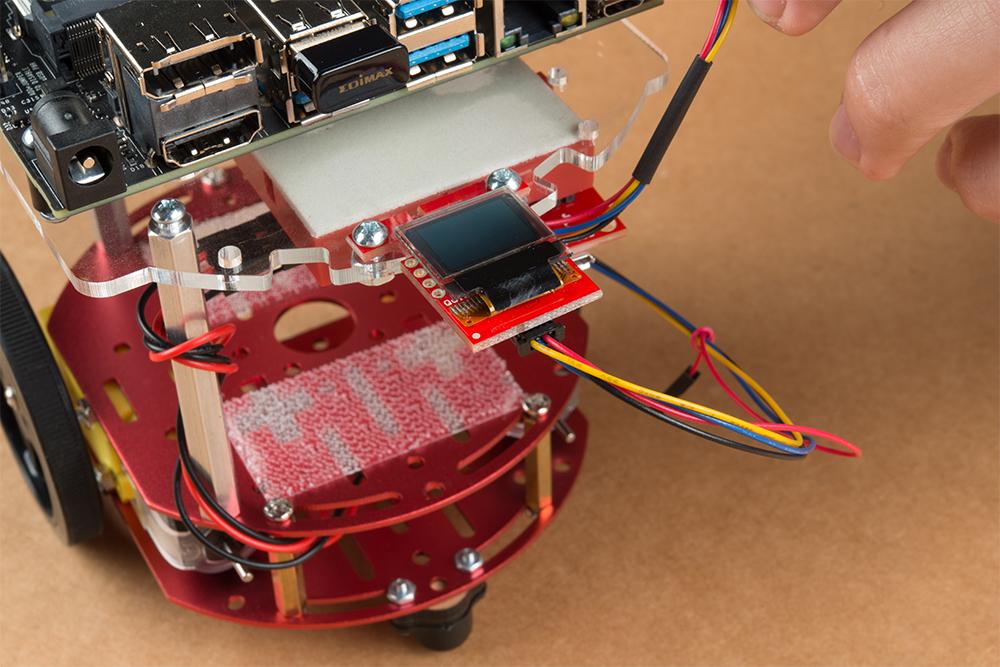
Align the mounting holes on the SparkFun Micro OLED (Qwiic) with those on the back of the SparkFun Jetbot acrylic mounting plate. Install the Micro OLED using two 1/4 in 4-40 Phillips head screws and two 4-40 machine screw nuts.
Thread the ribbon cable of the Leopard imaging camera back through the acrylic mounting plate and half-helix towards the left side of the Jetbot.
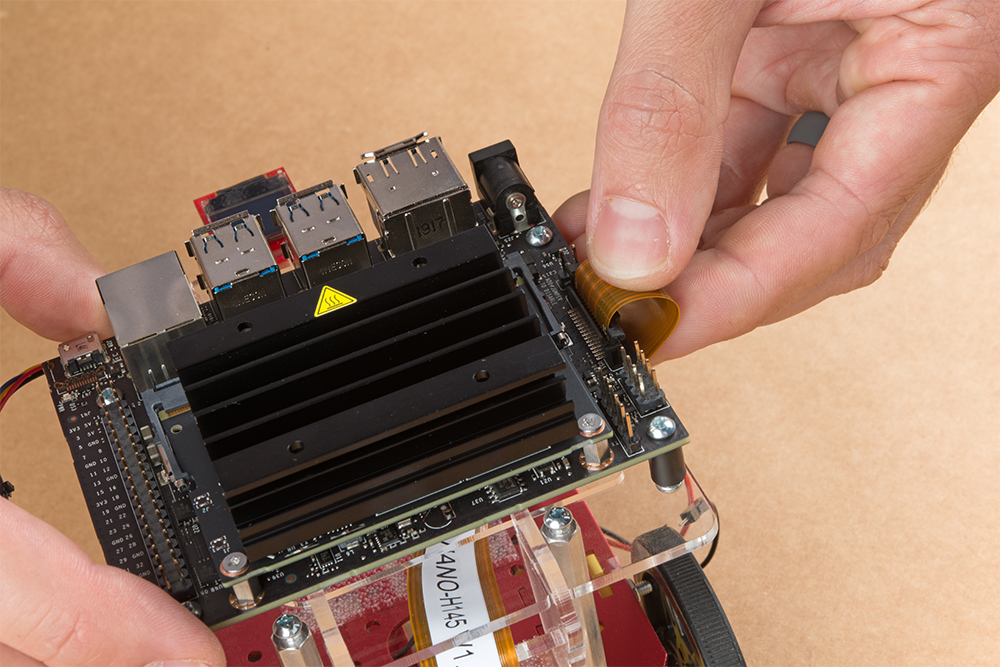
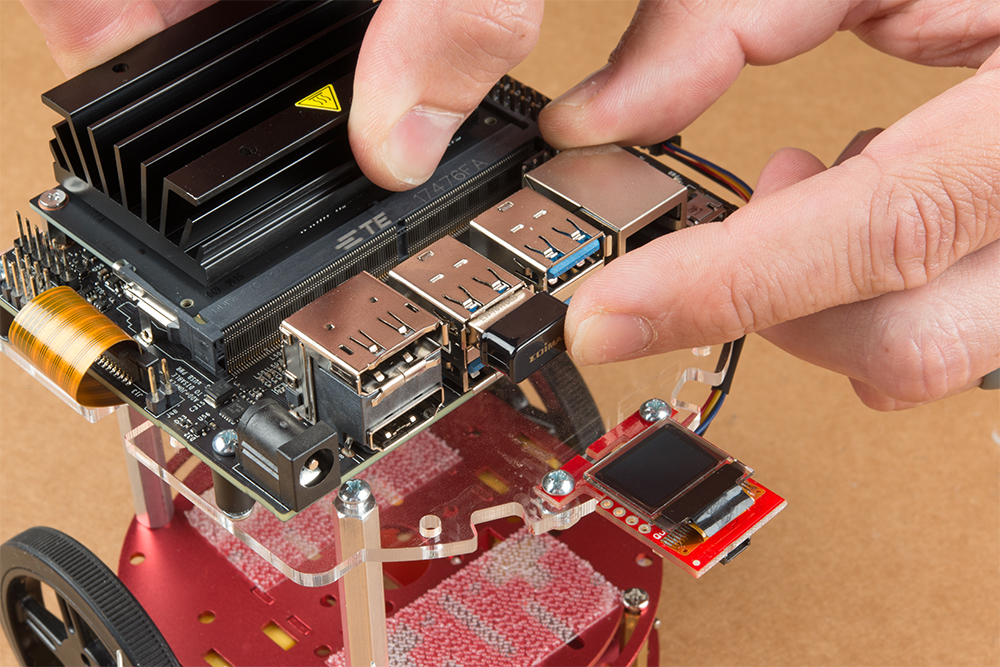
Install the Jetson Nano Dev kit to the nylon standoffs using four 1/4 in 4-40 Phillips head screws. Tighten each screw slightly in a criss-cross pattern to ensure the through holes do not bind during install until finger tight. Make sure you can still access the camera ribbon cable.
Note: the camera connector is made from small plastic components & can break easier than you think. Please be careful with this next step.
Loosen the camera connector with a fingernail or small flathead screwdriver. Fit the ribbon cable into this connector and depress the plastic press fit piece of the connector to hold the ribbon cable in place.
Unpackage & install the USB Wifi adaptor into one of the USB ports on the Jetson nano Dev Kit. The drivers for this Wifi adaptor are pre-installed on the SparkFun Jetbot image. If you are making your own image, you will need to ensure you get these from Edimax.
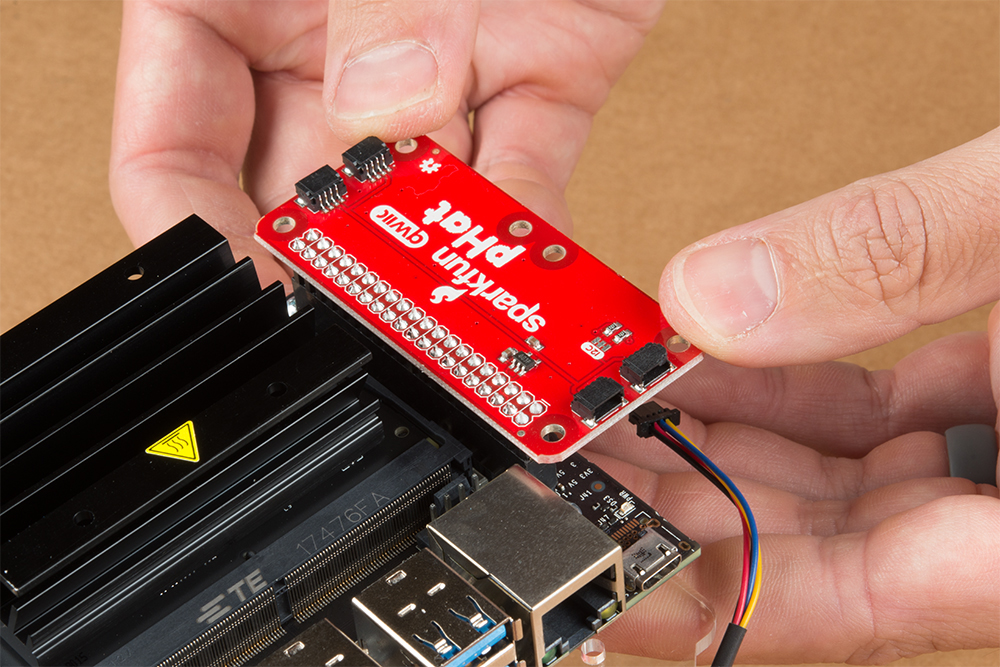
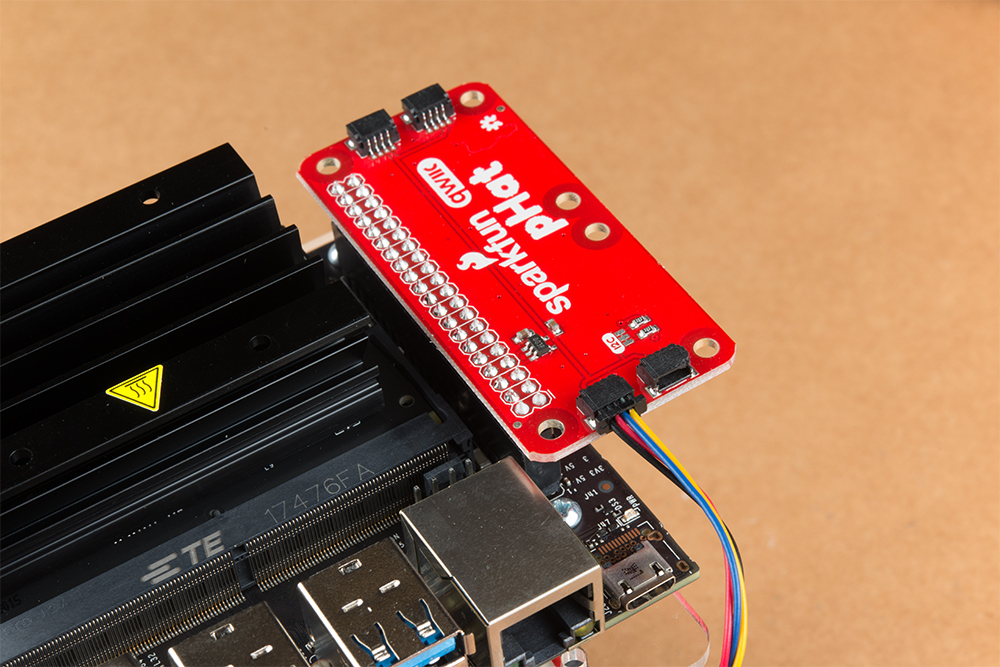
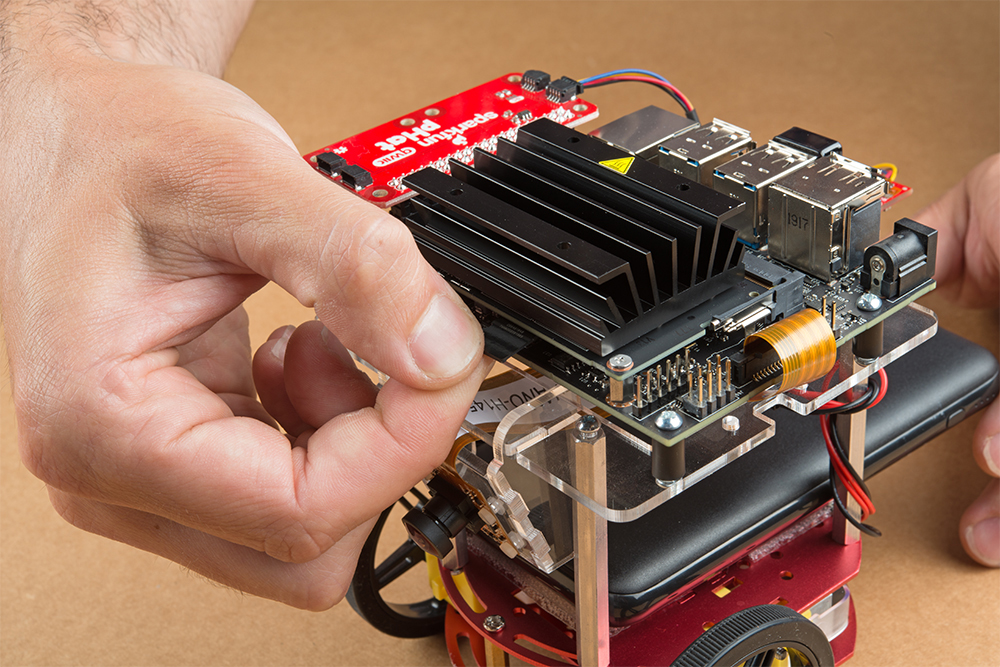
Align the SparkFun pHat with the GPIO headers on the Jetson Nano Dev Kit so that the pHat overhangs the right hand side of the Jetbot. For additional information on hardware assembly of the SparkFun pHat, please reference the hookup guide here.
Note: The heatsink on the Jetson Nano Dev Kit will only allow for one orientation of the SparkFun pHat.
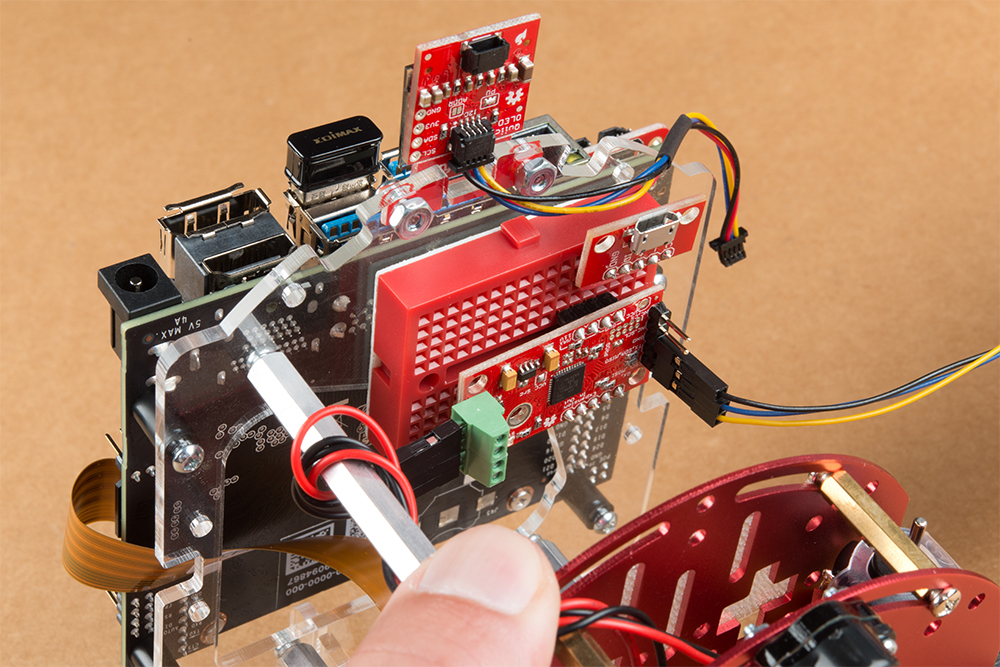
Wrap the motor wires around the rear/left standoff to take up some of the slack; one or two passes should do. Peel the cover off the self adhesive backing on the mini breadboard you set aside at the end of section #3.
Place the breadboard near the back of the Jetbot Acrylic mounting plate where there is good adhesion & access to all the components. Attach the (4-pin) Female Jumper Qwiic cable to the SparkFun Serial Controlled Motor Driver pins as shown. Yellow to ”SCL,” Blue to ”SDA,” Black to ”GND.”
Daisy chain the polarized Qwiic connector on the other end of the (4-pin) Female Jumper Qwiic cable into the back of the SparkFun Micro OLED (Qwiic).
Using the 100mm Qwiic Cable attach the SparkFun Micro OLED front Qwiic connector to the SparkFun pHat as shown.
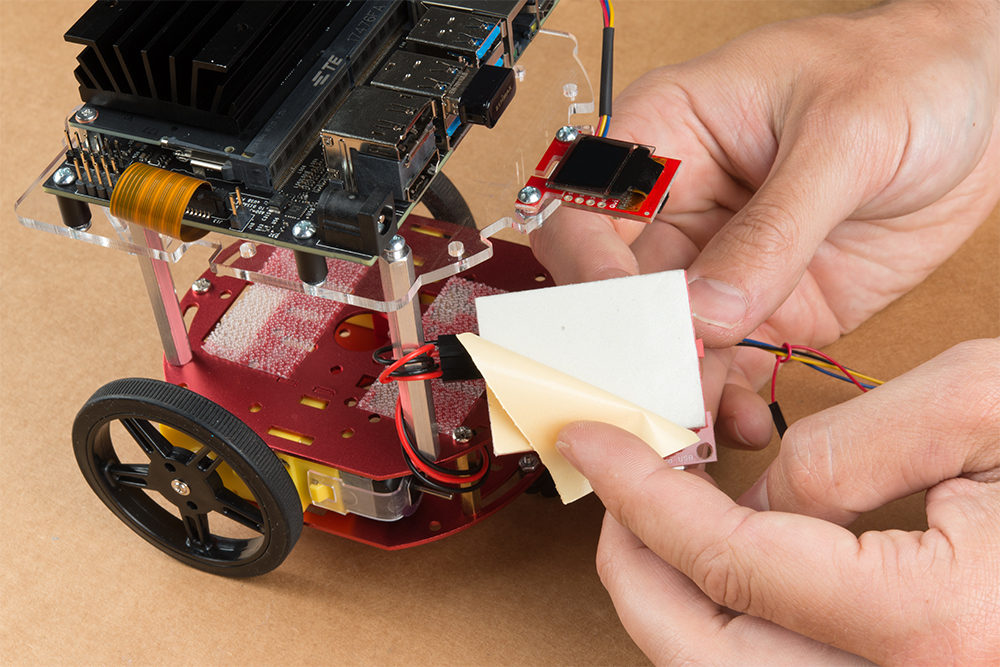
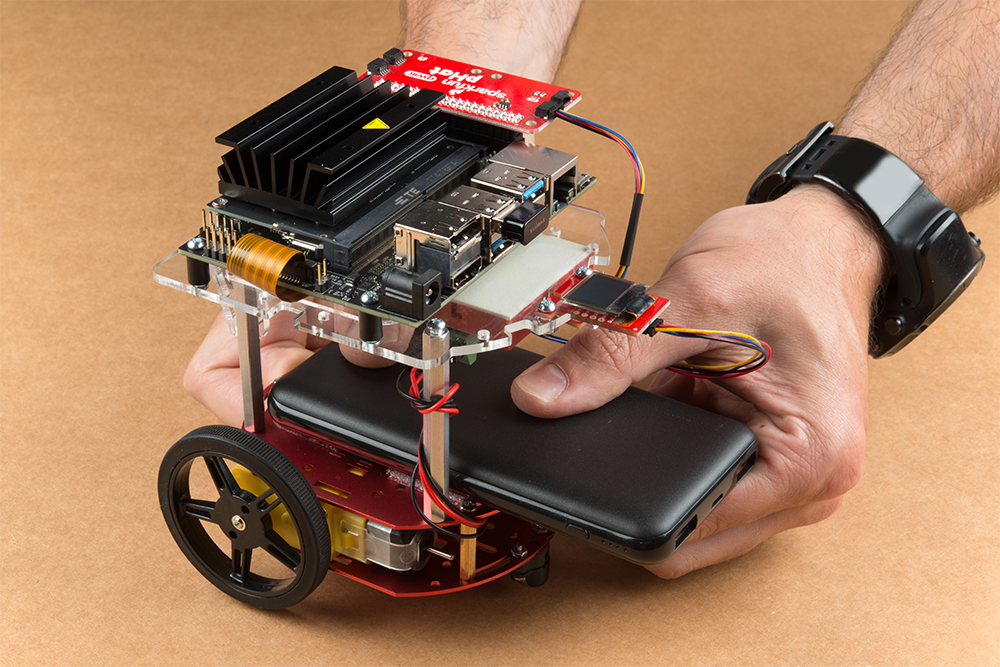
Cut the Dual Lock Velcro into two pieces and align them on the 10Ah battery & top plate of the Two-Layer Circular Robotics Chassis as shown below. Ensure that the USB ports on the battery pack are pointing out the back of the Jetbot. Additionally, the orange port (3A) will need to power the Jetson Nano Dev Kit & therefore will need to be on the right side of the Jetbot.
Apply firm pressure to the battery pack to attach to the Jetbot chassis via the Dual Lock Velcro.
Remove the micro SD card from the SD card adapter.
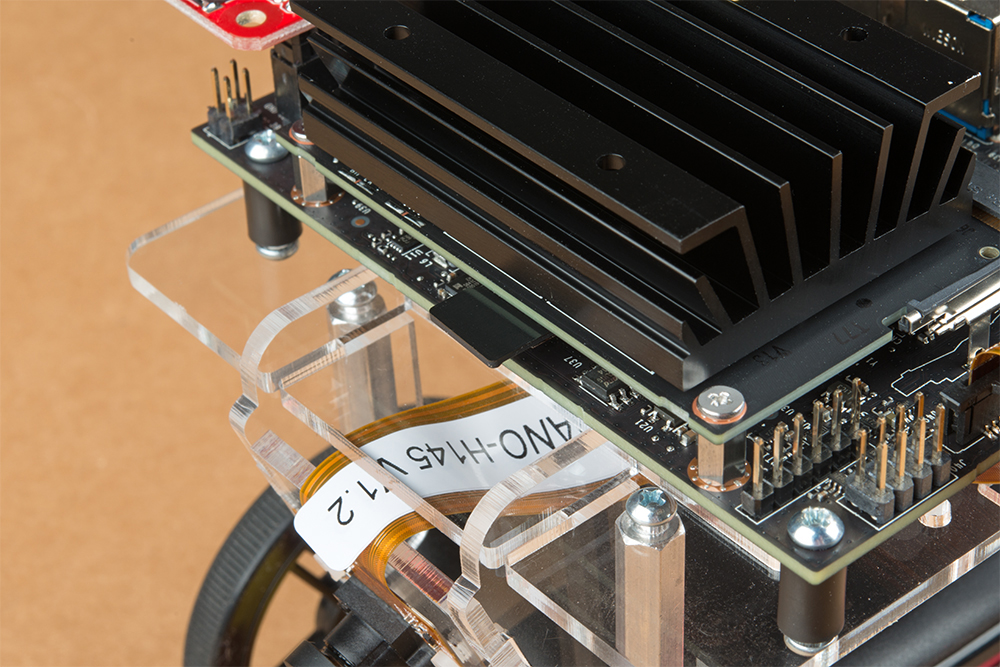
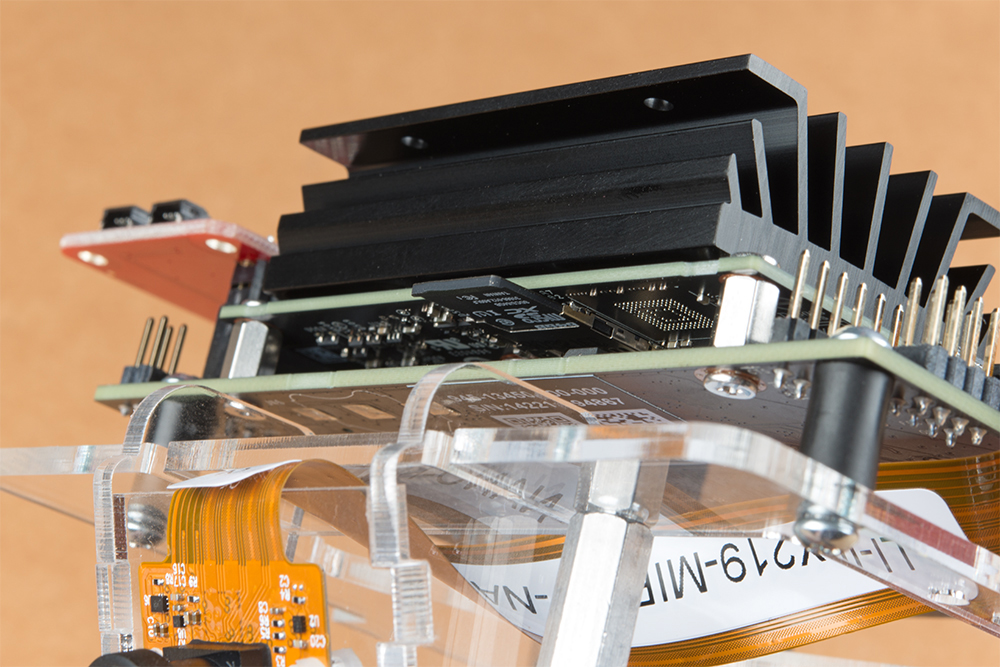
Insert the micro SD card facing down into the micro SD card slot on the front of the Jetson Nano Dev Kit. Please see the next three pictures for additional details.
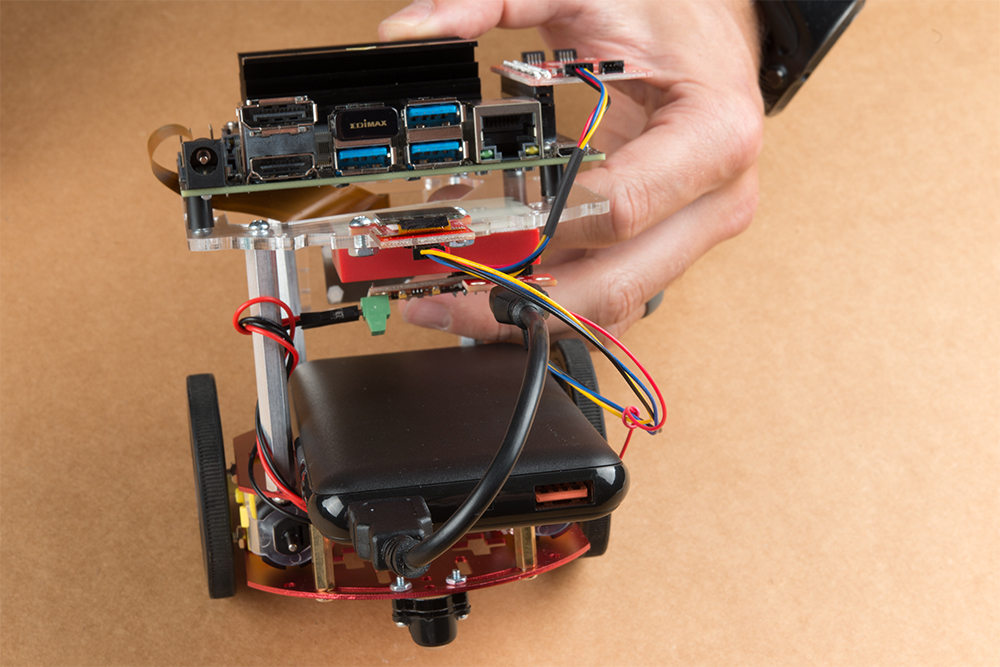
The USB ports on the back of the 10Ah battery pack has two differently colored ports. The black port (1A) is used to power the motor driver via the SparkFun microB breakout. Utilize one of the 6 in micro-B USB cables to supply power to the microB breakout.
Note: Once you plug the Jetson Nano Dev Kit into the 3A power port, this will ”Boot Jetson Nano” which is not covered in detail until the links in section #5 of this assembly guide. Do not proceed unless you are ready to move forward with the software setup & examples provided by NVIDIA.
The orange port (3A) is used to power the Jetson Nano Dev Kit. Utilize the remaining 6 in micro-B USB cable to supply power to the Jetson Nano Dev Kit.
Congratulations! You have fully assembled your SparkFun JetBot AI Kit!
5. Software Setup Guide from NVIDIA
Attention: The SD card in this kit comes pre-flashed to work with our hardware and has the all the modules installed (including the sample machine learning models needed for the collision avoidance and object following examples). The only software procedures needed to get your Jetbot running are steps 2-4 from the Nvidia instructions (i.e. setup the WiFi connection and then connect to the Jetbot using a browser). Please DO NOT format or flash a new image on the SD card; otherwise, you will need to flash our image back onto the card (instructions below).
Your SparkFun Jetbot comes with a Pre-Flashed micro SD card. Users only need to plug in the SD card and set up the WiFi connection to get started.
The default password on everything (i.e. login/user, jupyter notebook, and superuser) is ”jetbot”.
We recommend that users change their passwords after initial setup. These are typically covered on the first boot of your Jetson Nano as detailed in the NVIDIA Getting Started with Jetson Nano walkthrough
Software Setup
The only steps needed to get your Jetbot kit up and running is to log into the Jetbot and setup your WiFi connection. Once that is done, you are now ready to connect to the Jetbot wirelessly. If you need instructions for doing so, you can use the link below.However, please take note of our instructions below. You will want to skip steps 1 and 5 to avoid erasing the image on the card or undoing the hardware configuration.NVIDIA JETBOT WIKI SOFTWARE SETUP
Instructions
Skip step 1 of Nvidia’s instructions: It references how to flash your SD card, so feel free to skip to Step 2 – Boot Jetson Nano.
Note: Following Step 1 will erase the pre-flashed image and make a lot of extra work for yourself.
Skip step 5 of Nvidia’s instructions: This step should already be setup on the pre-flashed SD card.
If in the future, you need to update your notebooks, make sure that if you are following Step 5 – Install latest software (optional), skip the last command line instruction of the forth step.
Get and install the latest JetBot repository from GitHub by entering the following commands
COPY CODEgit clone https://github.com/NVIDIA-AI-IOT/jetbot
cd jetbot
sudo python3 setup.py install
Note:Running sudo python3 setup.py install in the command line will overwrite the software modifications for SparkFun’s hardware in the kit.
Troubleshooting
In the event that you accidentally missed the instructions above, here are instructions to get back on track.
Re-Flashing the SD card
If you need to re-flash your SD card, follow the instructions from Step 1 Nvidia’s guide. However, download and use our image instead (click link below).DOWNLOAD SPARKFUN’S JETBOT IMAGENote: Don’t forget to uncompress (i.e. unzip, extract, or expand) the file from the .zip file/folder first. You should be pointing the ”flashing” software to an ~62GB .img file to flash the image (sparkfun_jetbot_v01-00.img) onto the SD card.
Alternatively, there are other options for flashing images onto an SD card. If you have a preferred method, feel free to use the option you are most comfortable with.
Re-Applying the Software Modifications
If you have accidentally, overwritten the software modifications for the hardware included in your kit, you will need to repeat Step 5 from Nvidia’s guide from the desktop interface (if you are comfortable performing the following steps from the command line, feel free to do so).
Skip steps 1 and 2: Plug in a keyboard, mouse, and monitor. Then log in to the desktop interface (if you haven’t changed your password, the default password is: jetbot).
Follow step 3: Launch the terminal. There is an icon on sidebar on the left hand side. Otherwise, you can use the keyboard short cut (Ctrl + Alt + T).
Follow step 4: However, before you execute sudo python3 setup.py install you will want to copy in our file modifications to the jetbot directory you are in.
Begin by downloading our files (click link below).
Next, replace the files in the jetbot folder. The file paths must be the same, so make sure to overwrite files exactly.
Click on the icon that looks like a filing cabinet on the left hand side of the GUI. This is your Home directory. From here, you will need to proceed into the jetbot folder. There you will find a jetbot folder with similar files to the ones you just extracted. Delete the folder and copy in our files (you can also just overwrite the files as well).
Now, you can execute sudo python3 setup.py install in the terminal.
Follow step 5: Finish up by following step 5. Now you are back on track to getting your Jetbot running again!
6. Examples
The ”object following” jupyter notebook example won’t work due to the required dependencies that had not been released by NVIDIA prior to the creation of the SparkFun JetBot image. These updates can be manually installed on your Jetson Nano with the JetPack 4.2.1 release.
Update: The engine generated for the example utilized a previous version of TensorRT and is therefore, not compatible with the latest release. For more details on this issue, check out the following GitHub issue.NVIDIA JETBOT WIKI EXAMPLES
Resources and Going Further
Now that you’ve successfully got your JetBot AI up and running, it’s time to incorporate it into your own project!
For more information, check out the resources below:
Need some inspiration for your next project? Check out some of these related tutorials:
Easy Driver Hook-up Guide
Get started using the SparkFun Easy Driver for those project that need a little motion.
Servo Trigger Hookup Guide
How to use the SparkFun Servo Trigger to control a vast array of Servo Motors, without any programming!
SparkFun 5V/1A LiPo Charger/Booster Hookup Guide
This tutorial shows you how to hook up and use the SparkFun 5V/1A LiPo Charger/Booster circuit.
Wireless Remote Control with micro:bit
In this tutorial, we will utilize the MakeCode radio blocks to have the one micro:bit transmit a signal to a receiving micro:bit on the same channel. Eventually, we will control a micro:bot wirelessly using parts from the arcade:kit!
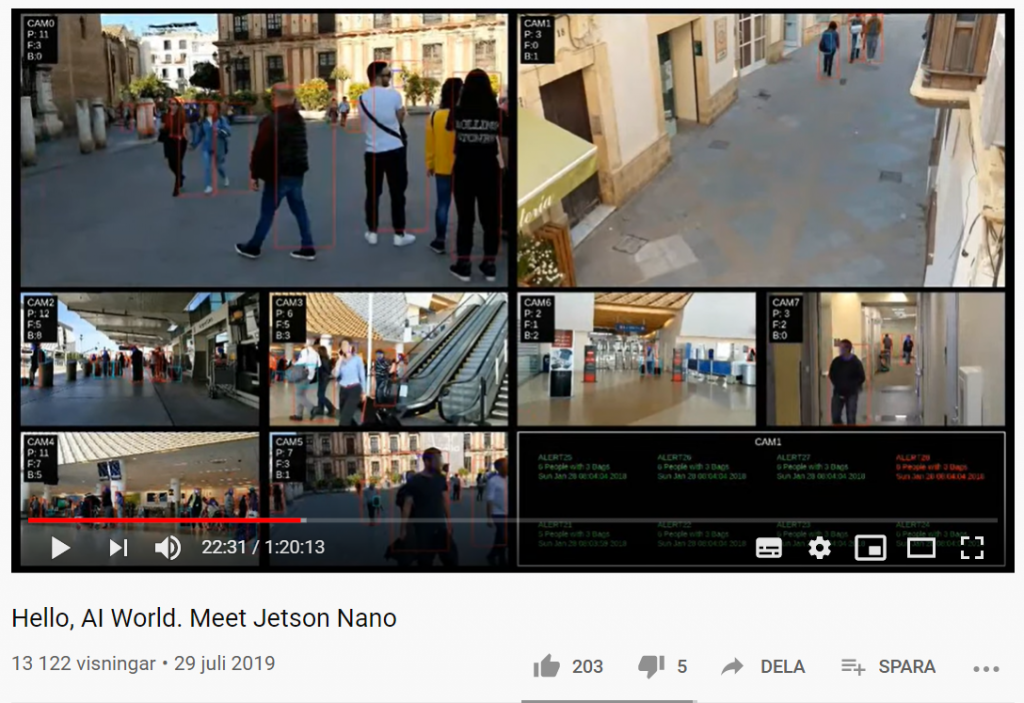
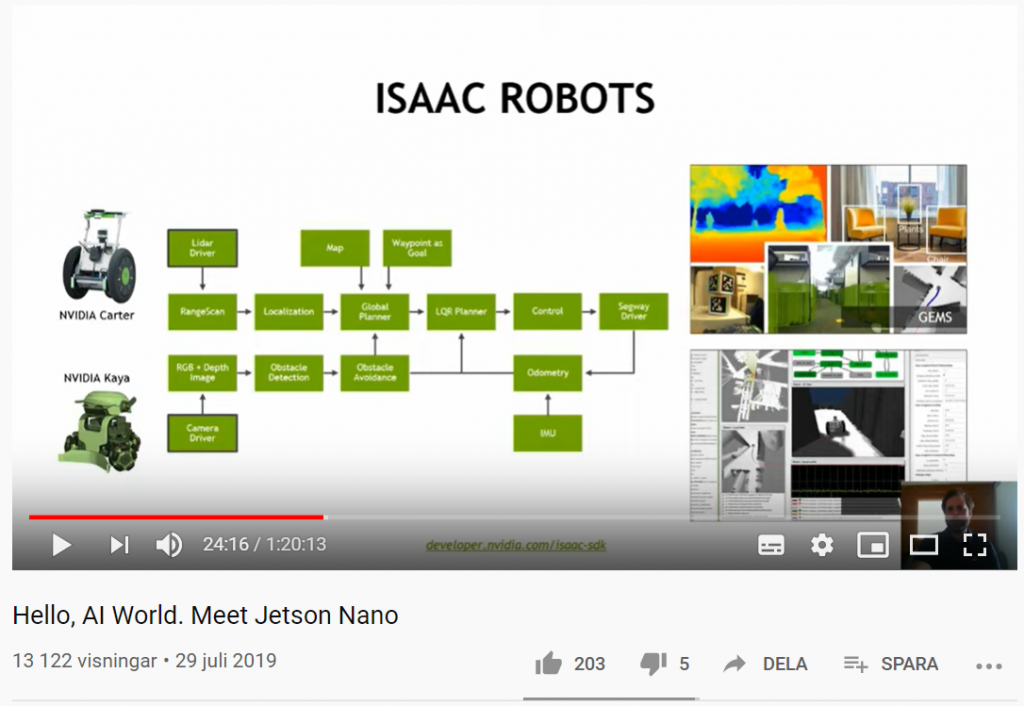
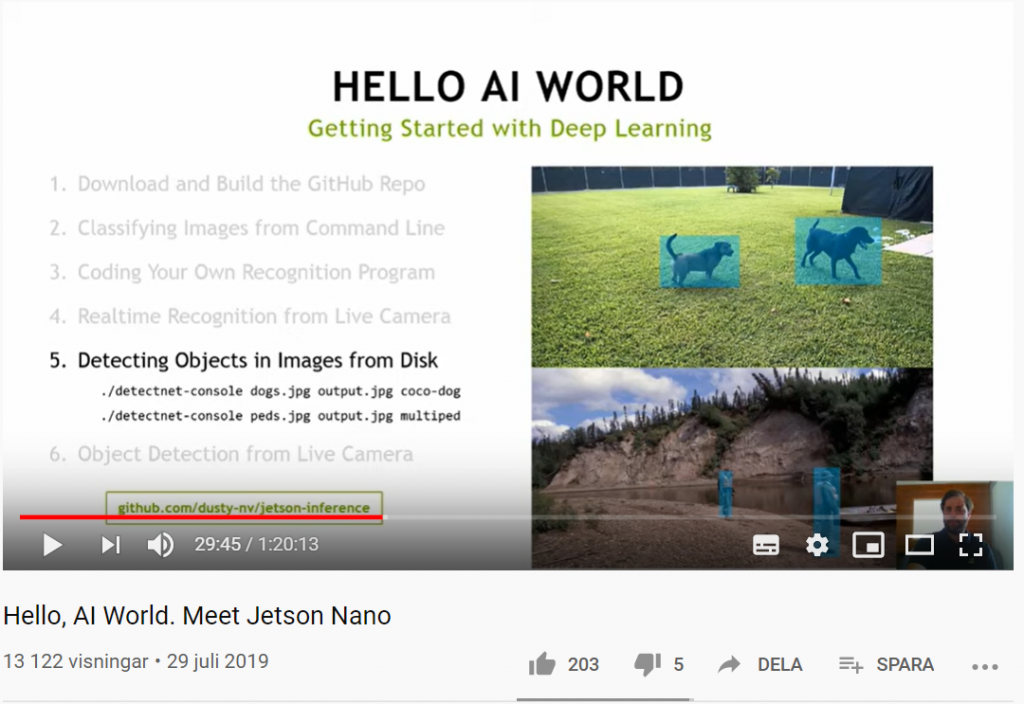
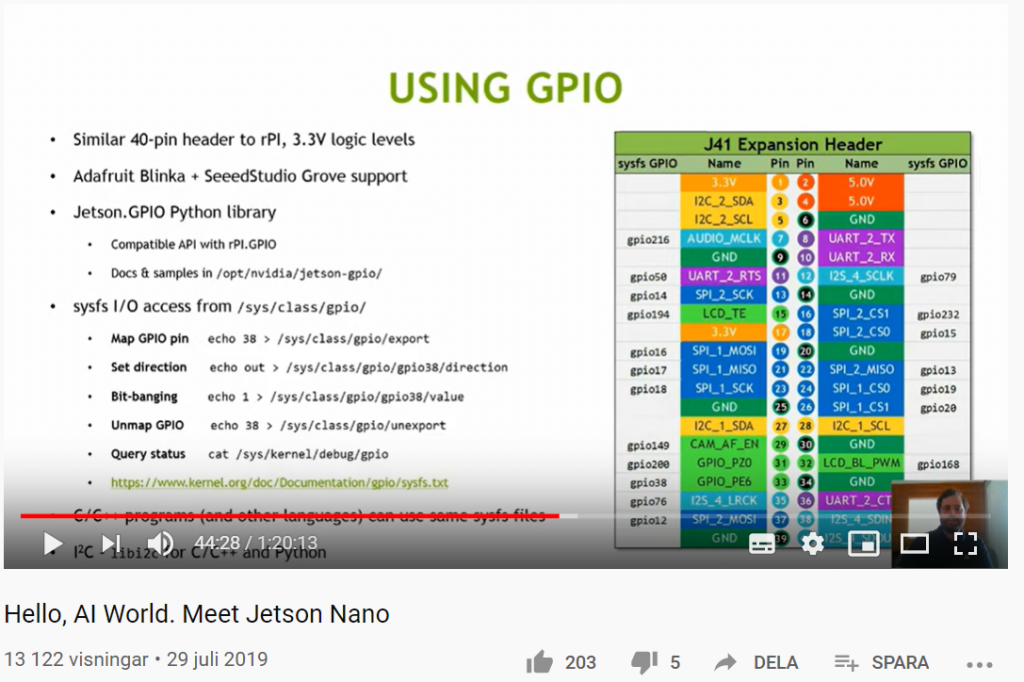
Join us for this engaging, informative webinar and live Q&A session to find out more about the hardware and software behind Jetson Nano. See how you can create and deploy your own deep learning models along with building autonomous robots and smart devices powered by AI. Find more resources for Jetson Nano at https://developer.nvidia.com/embedded…
Man behöver ofta lösa regressionsproblem när man tränar sina modeller för maskininlärning. I detta avsnitt av Coding TensorFlow diskuterar Robert Crowe hur man bygger och tränar en TensorFlow-modell med Keras, där du försöker hitta modellen som löser ett enda numeriskt resultat, med andra ord regression. Lär dig hur du kommer igång med regressionsproblem genom ett exempel där AI-modellen förutser en bils bränsleförbrukning i miles per gallon. Detta kräver att vår modell undersöker och lär sig av de data vi tillhandahåller för att förutsäga vårt slutliga nummer.
Neural Network Regression Model with Keras | Keras #3
I den här videon användes både en linjär och icke-linjär regressionsmodell för att förutsäga antalet visningar på en youtube-video baserat på den videons ”likes”, ”dislikes” och prenumeranter (en webcrawler användes för att samla in denna statistik). Modellerna är Neural Networks, och de implementeras med Keras API och Tensorflow-backend. I videon får du veta saker som vad regression är, hur man ställer in saker i Jupyter Notebook, träna-testa-dela, valideringsdelning, skalning / normalisering av data och när det är bra att göra det, batchstorlek, Stochastic Gradient Descent (SGD), Adam, epoker, iterationer, inlärningshastigheter, r2 (r ^ 2) poäng och mer.
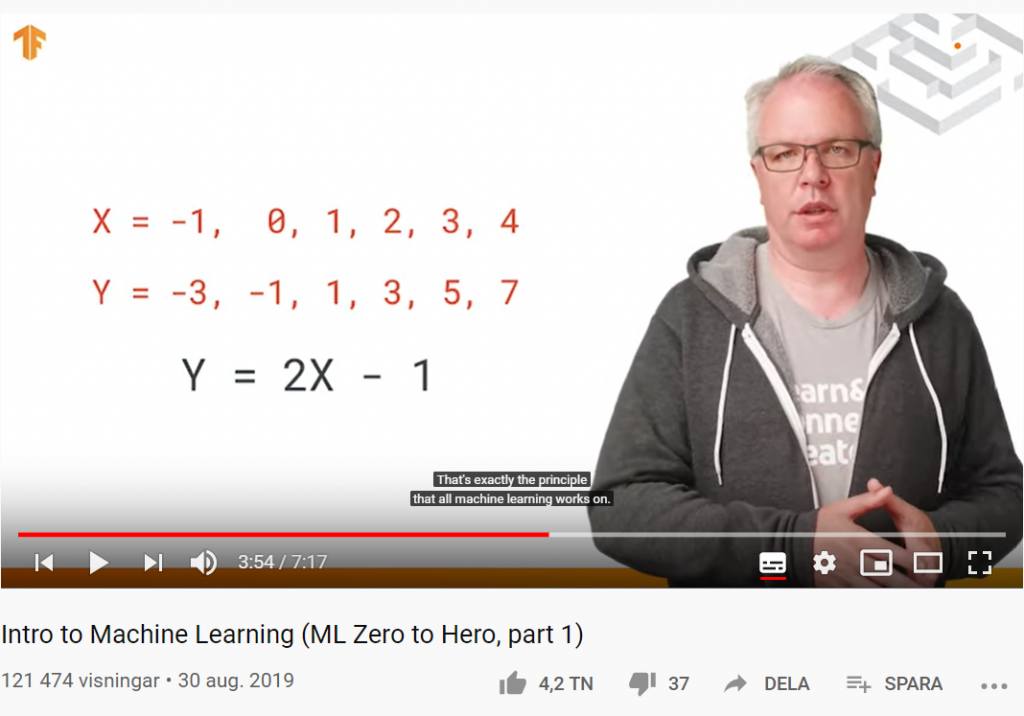
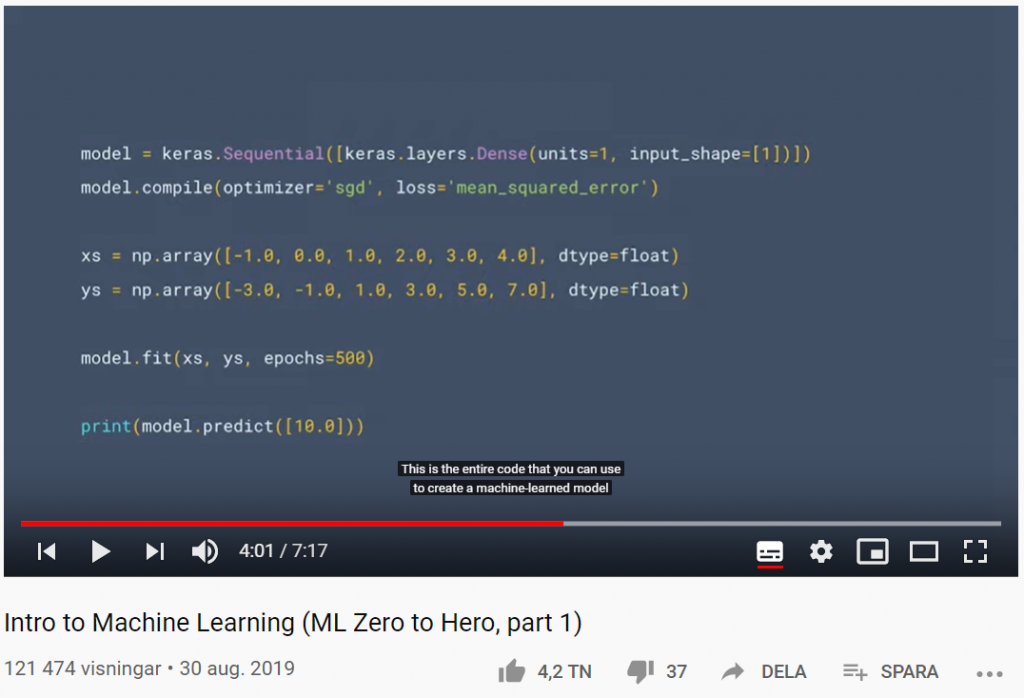
Maskininlärning (Machine Learning, ML) representerar ett nytt paradigm i programmering, där du istället för att programmera explicita regler på ett språk som Java eller C ++, bygger ett system som tränas och lärs upp på data från ett stort antal exempel, för att sedan kunna dra slutsatser av ny data baserat på de mönster som identifierats utifrån träningsdatat. Men hur ser ML egentligen ut? I del ett av Machine Learning Zero to Hero går AI-evangelisten Laurence Moroney (lmoroney @) genom ett grundläggande Hello World-exempel på hur man bygger en ML-modell och introducerar idéer som vi kommer att tillämpa i det senare avsnittet om datorseende (Computer Vision) längre ner på denna sida. Vill du ha en lite mer omfattande introduktion rekommenderar jag Introduction to TensorFlow 2.0: Easier for beginners, and more powerful for experts.
Prova själv den här koden i Hello World of Machine Learning: https://goo.gle/2Zp2ZF3
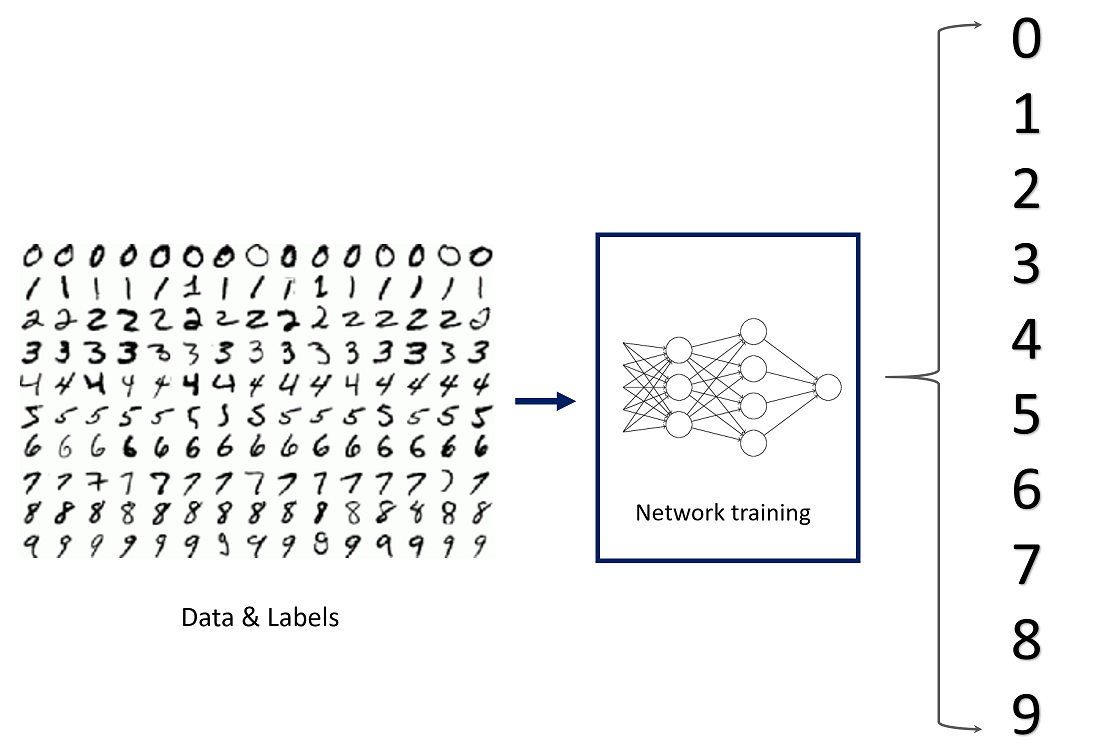
Basic Computer Vision with ML (ML Zero to Hero, part 2)
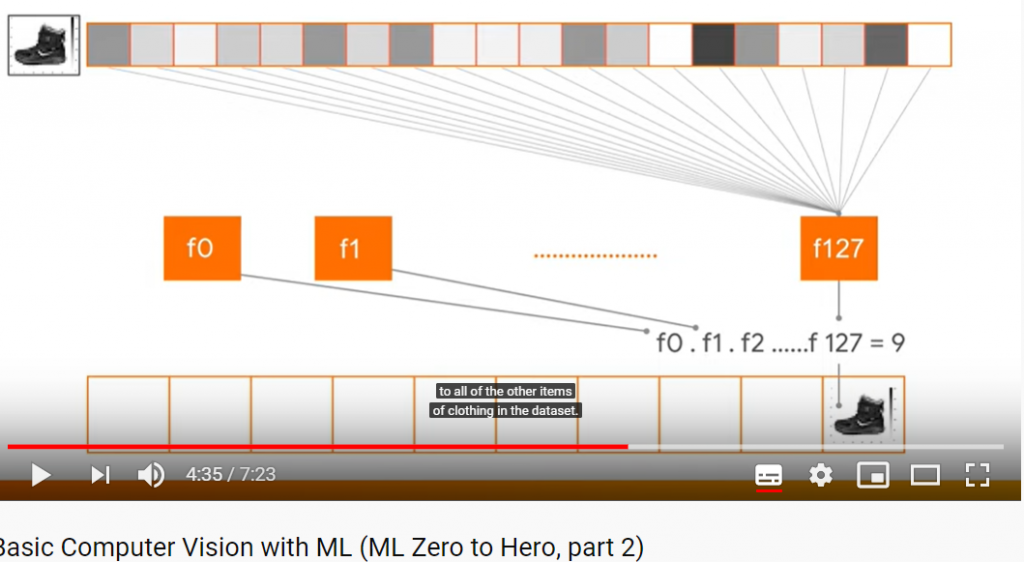
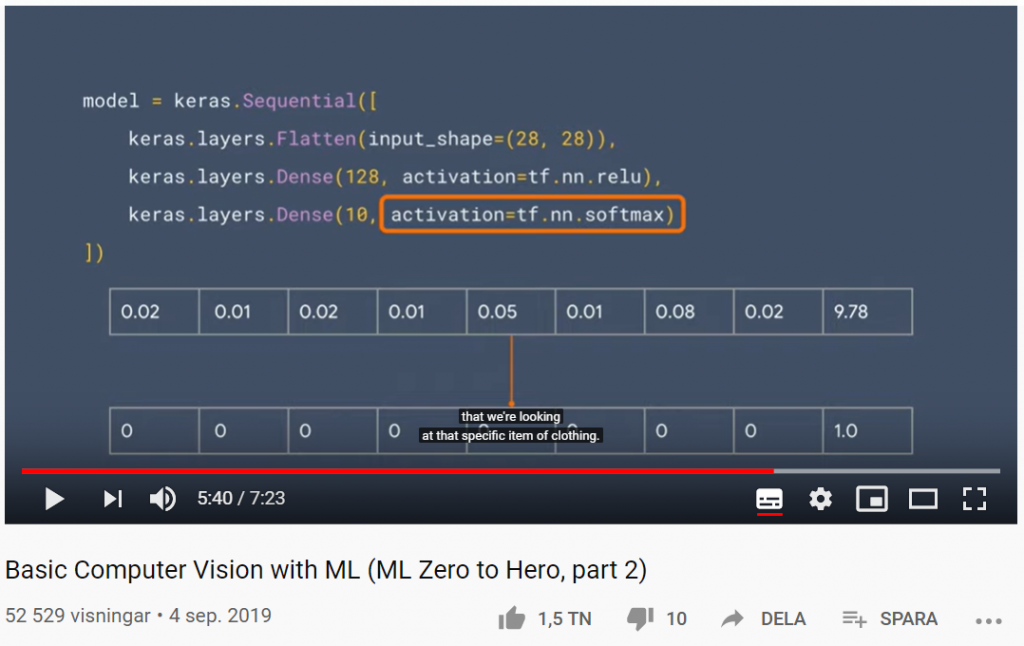
I del två av Machine Learning Zero to Hero går AI-evengalisten Laurence Moroney (lmoroney @) genom grundläggande datorseende (Computer Vision) med maskininlärning genom att lära en dator hur man ser och känner igen olika objekt (Object Recognition).
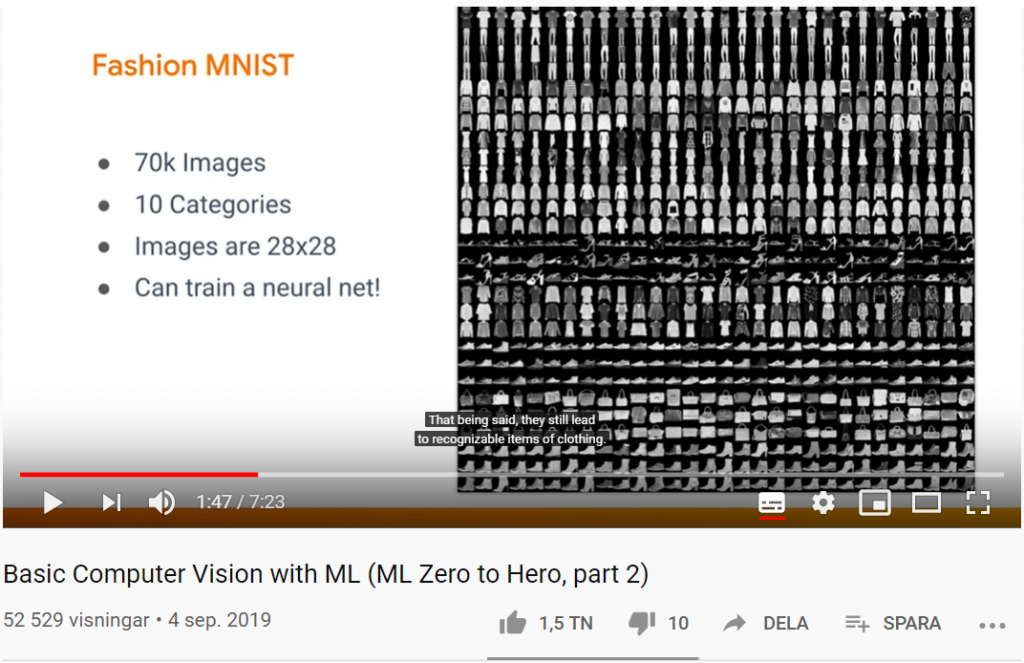
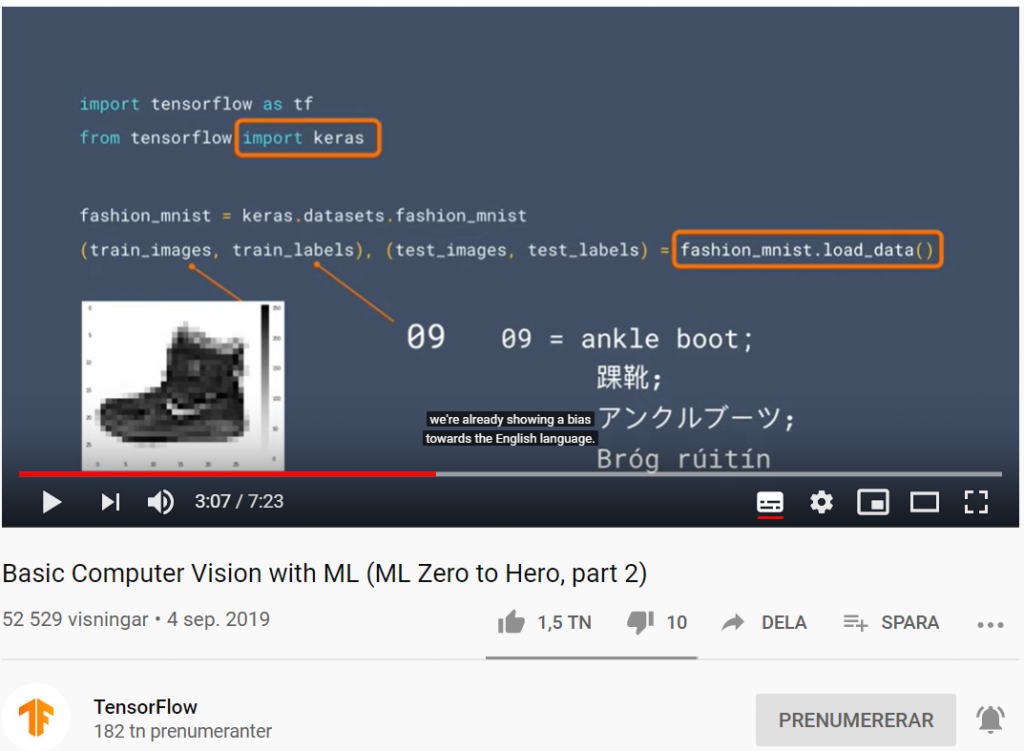
Fashion MNIST – ett dataset med bilder på kläder för benchmarking
Fashion-MNIST är ett forskningsprojekt av Kashif Rasul & Han Xiao i form av ett dataset av Zalandos artikelbilder. Det består av ett träningsset med 60 000 bildexempel och en testuppsättning med 10 000 exempel. Varje exempel är en 28 × 28 pixlar stor gråskalabild, associerad med en etikett från 10 klasser (klädkategorier). Fashion-MNIST är avsett att fungera som en direkt drop-in-ersättning av det ursprungliga MNIST-datasättet för benchmarking av maskininlärningsalgoritmer.
Fashion MNIST dataset
Varför är detta av intresse för det vetenskapliga samfundet?
Det ursprungliga MNIST-datasättet innehåller många handskrivna siffror. Människor från AI / ML / Data Science community älskar detta dataset och använder det som ett riktmärke för att validera sina algoritmer. Faktum är att MNIST ofta är det första datasetet de provar på. ”Om det inte fungerar på MNIST, fungerar det inte alls”, sägs det. ”Tja, men om det fungerar på MNIST, kan det fortfarande misslyckas med andra.”
MNIST Dataset för nummerklassificering
Fashion-MNIST är avsett att tjäna som en direkt drop-in ersättning för det ursprungliga MNIST-datasetet för att benchmarka maskininlärningsalgoritmer, eftersom det delar samma bildstorlek och strukturen för tränings- och testdelningar.
Varför ska man ersätta MNIST med Fashion MNIST? Här är några goda skäl:
Se mer om att koda TensorFlow → https://bit.ly/Coding-TensorFlow Prenumerera på TensorFlow-kanalen → http://bit.ly/2ZtOqA3
Introducing convolutional neural networks (ML Zero to Hero, part 3)
I del tre av Machine Learning Zero to Hero diskuterar AI-evangelisten Laurence Moroney (lmoroney @) CNN-nätverk (Convolutional Neural Networks) och varför de är så kraftfulla i datorseende-scenarier. En ”convolution” är ett filter som passerar över en bild, bearbetar den och extraherar funktioner eller vissa kännetecken (features) i bilden. I den här videon ser du hur de fungerar genom att bearbeta en bild för att se om du kan hitta specifika kännetecken (features) i bilden.
Codelab: Introduktion till invändningar → http://bit.ly/2lGoC5f
Introducing convolutional neural networks (ML Zero to Hero, part 3)
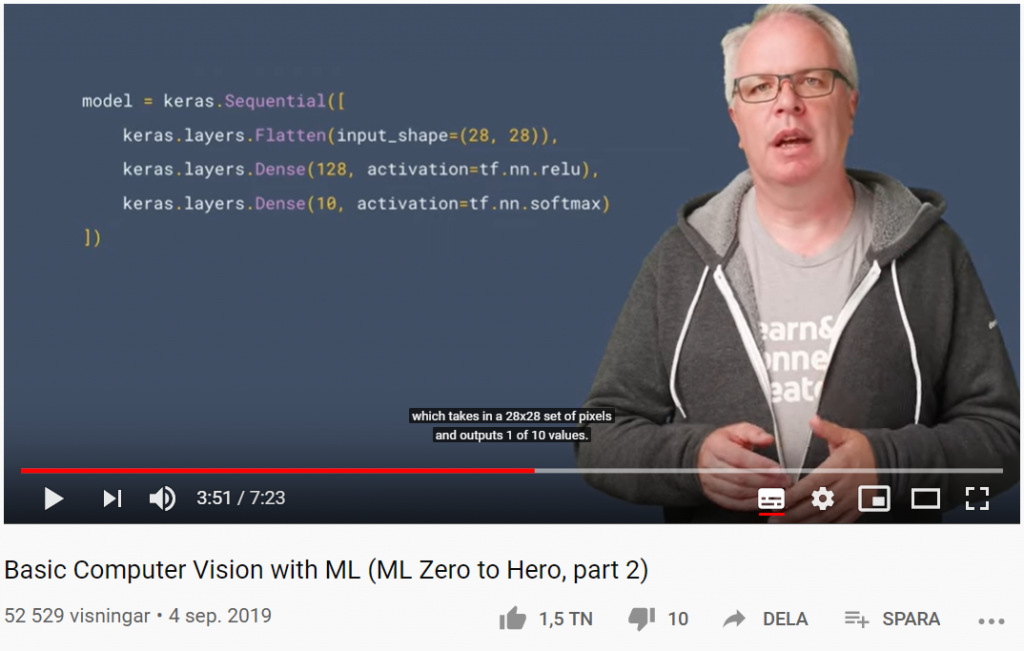
Build an image classifier (ML Zero to Hero, part 4)
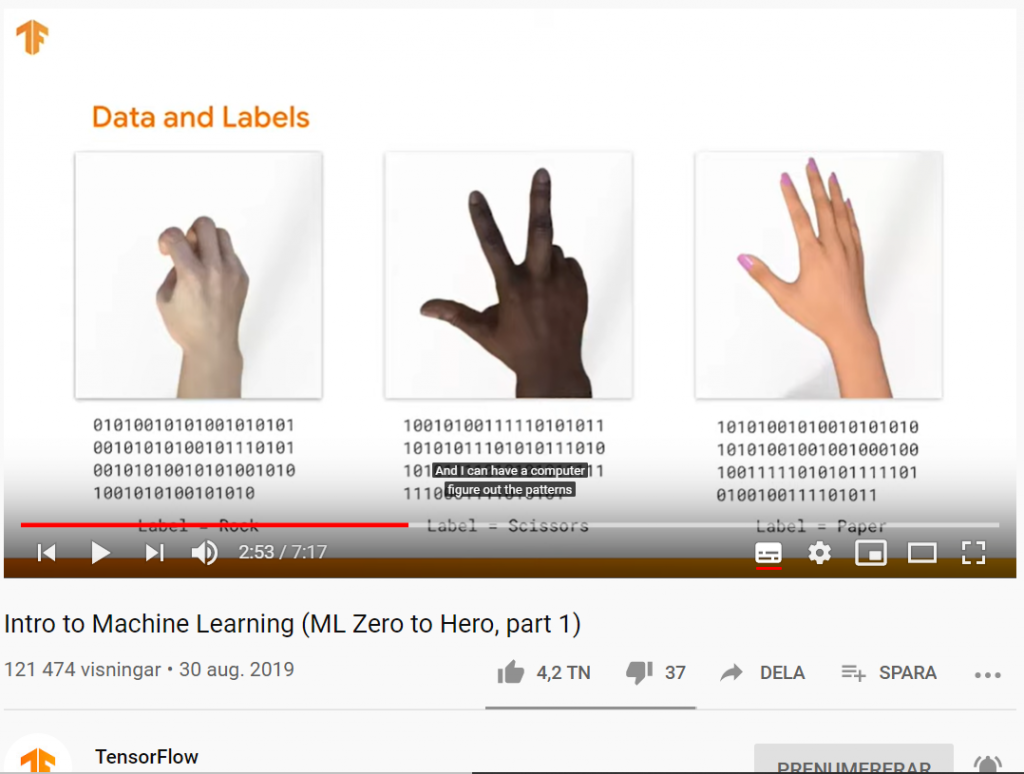
I del fyra av Machine Learning Zero to Hero diskuterar AI-evangelisten Laurence Moroney (lmoroney @) byggandet av en bildklassificerare för sten, sax och påse. I avsnitt ett visade vi ett scenario med sten, sax och påse, och diskuterade hur svårt det kan vara att skriva kod för att upptäcka och klassificera dessa. I de efterföljande avsnitten har vi lärt oss hur man bygger neurala nätverk för att upptäcka mönster av pixlarna i bilderna, att klassificera dem, och att upptäcka vissa kännetecken (features) med hjälp av bildklassificeringssystem med ett CNN-nätverk (Convolutional Neural Network). I det här avsnittet har vi lagt all information från de tre första delarna av serien i en.
Colab anteckningsbok: http://bit.ly/2lXXdw5
Rock, papper, saxdatasätt: http://bit.ly/2kbV92O
Build an image classifier (ML Zero to Hero, part 4)